 网硕互联帮助中心
网硕互联帮助中心目录
手把手教你学Simulink
一、引言:为什么“控制效果越来越差,但电机没坏”?——参数漂移是隐形性能杀手!
二、为何需要在线辨识?——参数漂移的影响
三、应用场景:电动汽车驱动电机的全生命周期自适应控制
系统需求
四、建模与实现步骤(Simulink 全流程仿真)
第一步:构建含真实参数漂移的PMSM模型(被控对象)
关键:让“真实电机”参数随工况变化
第二步:搭建标准FOC控制器(含固定参数)
第三步:选择在线辨识算法
推荐方案:扩展卡尔曼滤波(EKF)——兼顾精度与实时性
为什么选 EKF?
PMSM 扩展状态空间模型(用于EKF):
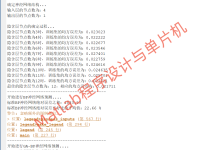
第四步:在Simulink中实现EKF辨识器
方法:使用 MATLAB Function 编写EKF
第五步:辨识结果反馈至控制器(自适应FOC)
修改FOC内部参数:
Simulink 实现:
第六步:转动惯量 J 在线辨识(速度环层面)
方法:最小二乘法(LS)或 扰动观测器
基于速度动态方程:
Simulink 实现(递推最小二乘):
第七步:数字孪生集成与健康监测
构建参数历史数据库:
云端数字孪生:
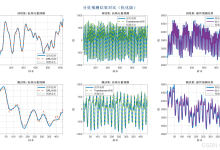
五、综合仿真与结果对比
测试场景:冷启动 → 高速爬坡 → 负载突变
六、高级技巧与工程实践
1. 激励信号设计
2. 计算资源优化
3. 与功能安全结合
4. 可持续性价值
5. 支持无位置传感器控制
七、总结
核心价值:
拓展方向:
手把手教你学Simulink–电机数字孪生/通信/可持续场景示例:基于Simulink的电机参数在线辨识仿真
手把手教你学Simulink
——电机数字孪生/通信/可持续场景示例:基于Simulink的电机参数在线辨识仿真



评论前必须登录!
注册