 网硕互联帮助中心
网硕互联帮助中心
基于新息协方差匹配的自适应UKF (CM-AUKF) vs 经典UKF对比,以二维雷达跟踪与滤波为背景 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
文章目录
- 运行结果
- MATLAB源代码
- 程序详解
-
- 代码功能与方法概述
运行结果
目标轨迹(在代码中可直接修改): 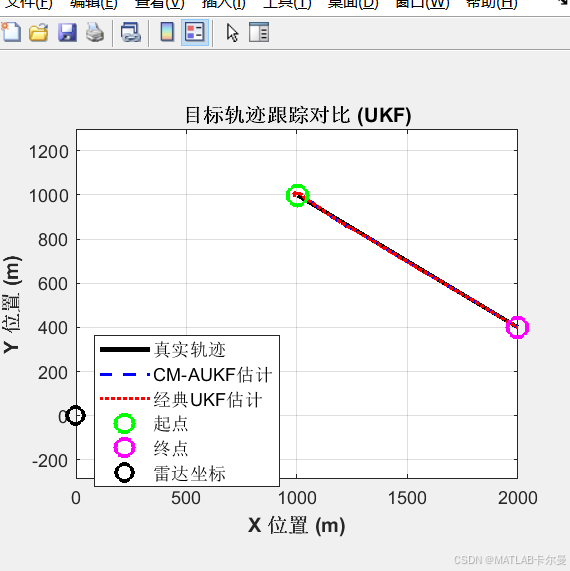 估计的位置误差:
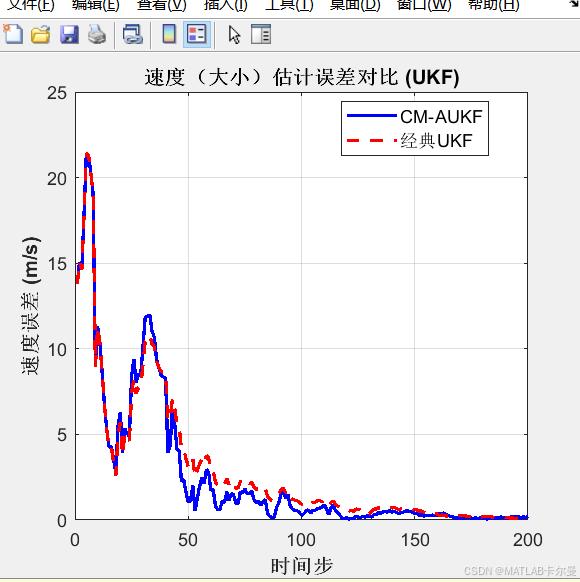
估计的位置误差: 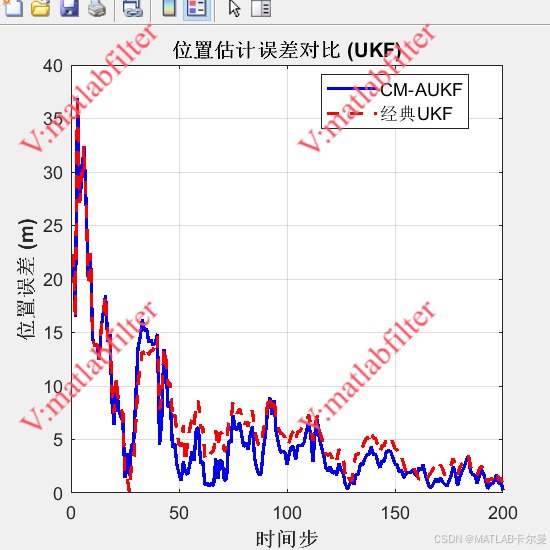 估计的速度误差:
估计的速度误差:
 自适应曲线:
自适应曲线: 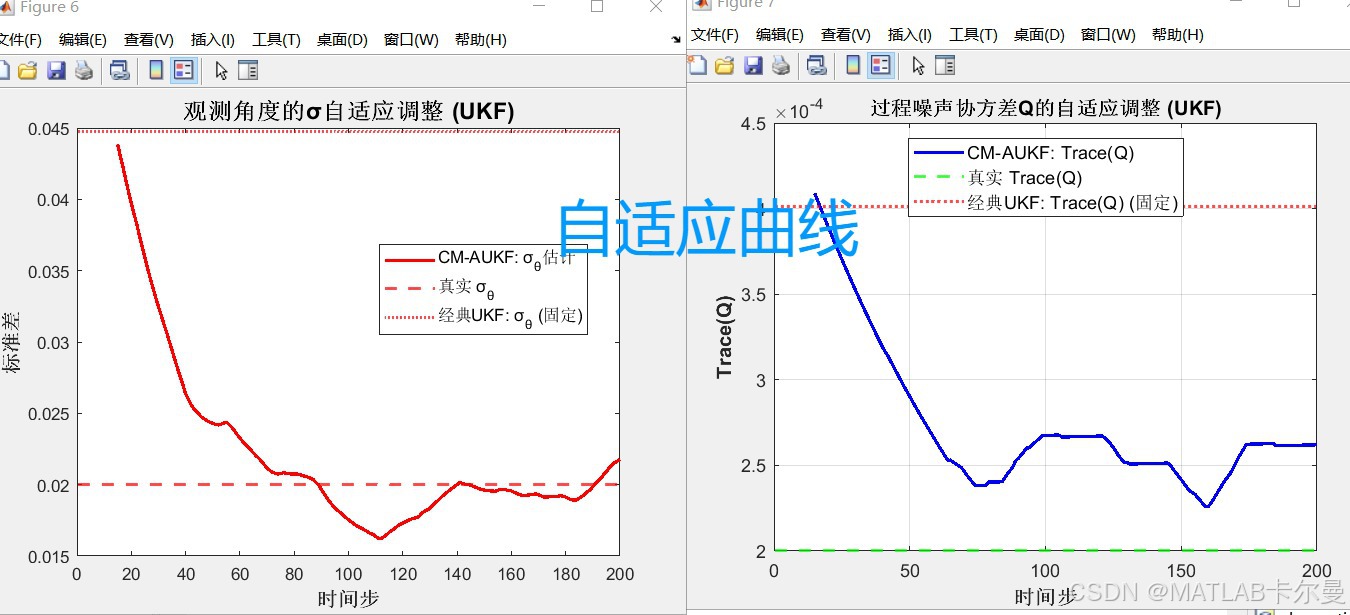 命令行输出的结果:
命令行输出的结果: 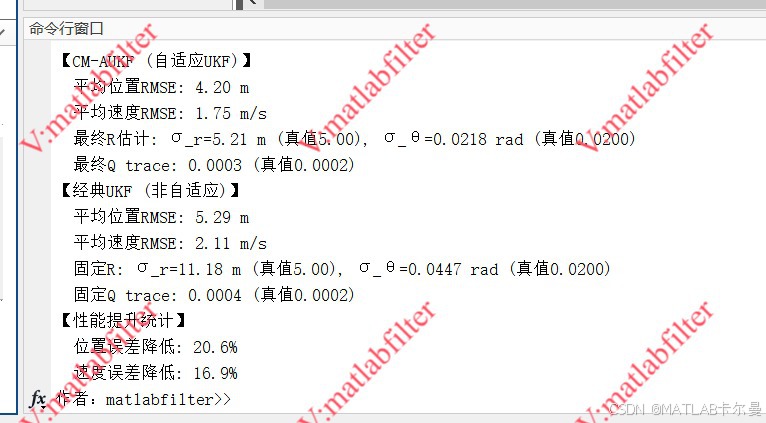
MATLAB源代码
完整代码如下:
% 基于新息协方差匹配的自适应UKF (CM-AUKF) vs 经典UK
基于新息协方差匹配的自适应UKF (CM-AUKF) vs 经典UKF对比,以二维雷达跟踪与滤波为背景 订阅专栏后,可直接查看源代码,粘贴到MATLAB空脚本中即可直接运行、得到结果
目标轨迹(在代码中可直接修改): 估计的位置误差: 估计的速度误差:
自适应曲线: 命令行输出的结果:
完整代码如下:
% 基于新息协方差匹配的自适应UKF (CM-AUKF) vs 经典UK




评论前必须登录!
注册