 网硕互联帮助中心
网硕互联帮助中心一、开发板硬件:工业级架构与 LED 电路底层解析
正点原子 IMX6ULL-Mini 开发板采用核心板 + 底板的分离式架构设计,这是工业级嵌入式产品的主流设计方案,既保证核心计算模块的稳定性,又兼顾底板外设的扩展性。硬件是嵌入式开发的基础,所有软件代码均围绕硬件特性编写,理解硬件细节是实现精准控制的前提。
(一)核心板:工业级参数与硬件特性
核心板基于 NXP i.MX6ULL 处理器(Cortex-A7 单核)设计,分为工业级与商业级版本,适配不同应用场景,其核心硬件参数与工业级设计优势如下:
| CPU | 工业级:528MHz(宽温 – 40℃~85℃)商业级:800MHz(常温 0℃~70℃) | 宽温特性适配恶劣环境,BGA 封装抗振动、抗冲击,接触电阻小、信号传输稳定,满足工业设备可靠性要求 | 工业控制柜、户外监测设备、车载终端 |
| 内存 | 512MB DDR3L RAM(低功耗版) | 相比普通 DDR3,功耗降低 30% 以上,支持低压供电,减少发热,提升设备续航与稳定性 | 电池供电的便携设备、长时间运行的工业终端 |
| 存储 | 8GB eMMC 5.0 | 集成度高,内置控制器与纠错机制,读写速度快(最大读速 150MB/s)、抗干扰性强,相比 SD 卡更适合程序固化与长期数据存储 | 量产型嵌入式产品、对存储稳定性要求高的场景 |
| 启动模块 | 支持 SD 卡 / EMMC/NAND Flash(拨码开关切换) | 灵活适配开发调试与产品量产:SD 卡支持程序快速烧写与修改,适合开发;EMMC/NAND Flash 支持程序固化,防止意外修改,适合量产 | 开发阶段(SD 卡)、量产阶段(EMMC/NAND) |
| 外设接口 | 集成 UART/SPI/I2C/PWM/GPIO 等基础接口,预留 RGB 显示接口 | 接口丰富,可直接拓展传感器、显示屏、通信模块,无需额外设计驱动电路,降低开发成本 | 工业人机交互设备、物联网数据采集终端 |
核心板与底板通过2.54mm 镀金插针连接,相比邮票孔、排针焊接等方式,镀金插针的接触电阻更小(<50mΩ),抗氧化能力更强,且支持多次插拔,大幅降低硬件返修成本,完全符合工业产品的可靠性与可维护性设计原则。
(二)LED 模块:电路设计与控制逻辑
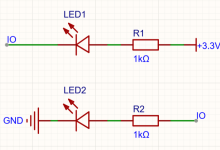
底板上设计有2 个 LED 灯,分为电源指示 LED与用户可控 LED,电路设计兼顾功能性与硬件保护,是嵌入式硬件设计的典型案例,其详细电路与控制逻辑如下:
蓝色 LED(电源指示)
- 电路设计:直接并联在 5V 电源端,串联 1kΩ 限流电阻,无软件控制接口;
- 工作逻辑:上电后自动点亮,若该 LED 不亮,说明开发板供电链路故障,是硬件故障快速排查的重要标识;
- 限流电阻作用:限制回路电流,避免过流烧毁 LED 灯珠,1kΩ 电阻可将电流控制在 5mA 左右,满足指示灯点亮需求。
红色 LED(用户可控,本次实验核心)
- 电路设计:阳极通过 510Ω 限流电阻连接 3.3V VCC,阴极直接连接 GPIO1_IO03 引脚,采用灌电流驱动方式;
- 核心控制逻辑:GPIO1_IO03 引脚输出低电平时,LED 两端形成 3.3V-2.2V=1.1V 的有效电压差,回路导通,LED 点亮;引脚输出高电平时,LED 两端电压差为 0,回路截止,LED 熄灭。
- 灌电流驱动的优势:Cortex-A7 内核的 GPIO 引脚灌电流能力(引脚接收电流,最大约 20mA)远大于拉电流能力(引脚输出电流,最大约 5mA),灌电流驱动方式能保证 LED 获得稳定的工作电流,同时避免 GPIO 引脚因输出过大电流而损坏,是嵌入式 GPIO 驱动 LED 的标准设计方案。
- 510Ω 限流电阻的设计依据:LED 灯珠为通用直插式,额定工作电压2.2V,额定工作电流20mA,根据欧姆定律 I=(U-Vled)/R,3.3V 供电下,理论限流电阻 R=(3.3-2.2)/0.02=55Ω,实际选用510Ω偏大电阻,将实际工作电流控制在约 2.16mA,既满足肉眼可见的点亮需求,又做硬件冗余保护,避免因电源电压波动(如 3.3V 飘移至 3.6V)导致过流烧毁灯珠,同时降低 GPIO 引脚的负载,体现工业电路 **“硬件保护优先”** 的设计原则。
(三)GPIO1_IO03 引脚:多功能特性与硬件映射
IMX6ULL 处理器的所有通用引脚均为多功能复用引脚,通过专用寄存器可配置为不同外设功能,GPIO1_IO03 引脚的功能分配由 NXP 官方《IMX6ULL 参考手册》严格定义,共支持 5 种外设功能,功能选择由寄存器的 MUX_MODE 位段决定,具体如下:
- ALT0(MUX_MODE=0000):SPI1_SCK(SPI1 串行时钟引脚)
- ALT1(MUX_MODE=0001):UART1_RTS(UART1 请求发送引脚)
- ALT2(MUX_MODE=0010):I2C1_SDA(I2C1 串行数据引脚)
- ALT3(MUX_MODE=0011):PWMOUT3(PWM3 脉冲输出引脚)
- ALT5(MUX_MODE=0101):GPIO1_IO03(通用输入输出引脚)
核心原则:引脚的实际功能由软件配置寄存器决定,硬件仅提供物理链路,若未通过软件将其配置为 GPIO 功能,即使后续编写 GPIO 控制代码,引脚仍会保持默认的 SPI1_SCK 功能,无法实现 LED 控制,这是 **“硬件为基,软件配置”** 的嵌入式开发核心体现。
二、开发环境:跨系统工具链搭建与高效协作方案
嵌入式裸机开发的主机为 x86/x86_64 架构(Windows/Ubuntu),目标板为 ARMv7-A 架构(IMX6ULL),因架构不兼容,主机原生编译器无法生成目标板可执行代码,因此需搭建跨平台交叉开发环境。本次采用 **Windows(代码编辑,操作友好)+ Ubuntu(交叉编译,原生支持嵌入式工具链)** 的协同方案,实现 “代码编辑→文件传输→交叉编译→程序烧写” 的全流程高效衔接,所有步骤均为工业级开发标准流程,避坑细节全覆盖。
(一)代码编辑:VS Code + ARM 汇编插件(全配置细节)
VS Code 是嵌入式开发的主流编辑器,支持跨平台、语法高亮、代码提示、插件拓展,搭配Arm Assembly插件可实现 ARM 汇编代码的精准编辑,完全满足.s汇编文件与.cC 文件的编辑需求,Windows 端详细配置步骤如下(Ubuntu 端配置逻辑一致):
关键避坑:工程路径若包含中文 / 空格,Ubuntu 端的交叉编译工具链会因无法解析路径而提示No such file or directory,这是嵌入式开发的经典低级错误,必须严格规避。
(二)交叉编译器:安装与永久环境变量配置(避坑指南)
IMX6ULL 为ARMv7-A架构,需使用适配该架构的ARM-Linux 交叉编译工具链,本次选用gcc-linaro-4.9.4-2017.01版本,该版本是 NXP 官方推荐的编译器,与 i.MX6ULL 处理器完全兼容,无兼容性问题,Ubuntu 端完整安装步骤与避坑细节如下:
# 1. 创建编译器统一管理目录,便于后续工具链维护与版本切换
sudo mkdir -p /usr/local/arm
# 2. 将编译器安装包拷贝到管理目录(假设安装包在~/Downloads目录,根据实际路径修改)
sudo cp ~/Downloads/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz /usr/local/arm/
# 3. 进入安装目录,解压编译器(-xvf:保留原文件、显示解压过程、按文件结构解压)
cd /usr/local/arm
sudo tar -xvf gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz
# 4. 删除安装包,节省磁盘空间(解压后安装包无使用价值)
sudo rm gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf.tar.xz
# 5. 配置永久环境变量,避免每次终端启动都重新配置
vi ~/.bashrc
# 6. 在.bashrc文件末尾添加以下内容(编译器bin目录路径,必须精准,多一个/少一个/都会报错)
export PATH=$PATH:/usr/local/arm/gcc-linaro-4.9.4-2017.01-x86_64_arm-linux-gnueabihf/bin/
# 7. 保存并退出vi编辑器:按Esc键,输入:wq,回车
# 8. 使环境变量立即生效(无需重启终端)
source ~/.bashrc
- 验证命令:arm-linux-gnueabihf-gcc -v
- 成功标识:终端输出gcc version 4.9.4 (Linaro GCC 4.9-2017.01),说明编译器安装与环境变量配置成功;
- 常见错误 1:command not found→ 原因:路径错误,检查编译器解压后的目录名称是否与配置路径一致,是否漏写bin/;
- 常见错误 2:权限不足→ 原因:未使用sudo解压,执行sudo chmod -R 777 /usr/local/arm赋予权限后重新配置;
- 常见错误 3:环境变量不生效→ 原因:未执行source ~/.bashrc,或修改的是/etc/bashrc而非~/.bashrc(前者为系统全局环境变量,后者为当前用户环境变量)。
(三)文件传输:FTP 服务 + FileZilla(高速稳定传输)
Windows 为代码编辑端,Ubuntu 为编译端,需实现两个系统间的文件快速传输,本次采用 **vsftpd(Ubuntu 端 FTP 服务)+ FileZilla(Windows 端 FTP 客户端)** 的方案,该方案传输速度快(局域网可达 10MB/s 以上)、配置简单、稳定性高,远优于 U 盘拷贝、共享文件夹等方式,完整配置步骤如下:
Ubuntu 端:vsftpd 服务安装与核心配置
# 1. 安装vsftpd服务(Ubuntu默认未安装)
sudo apt install vsftpd -y
# 2. 备份原配置文件,避免配置错误无法恢复(核心操作,防止配置失误)
sudo cp /etc/vsftpd.conf /etc/vsftpd.conf.bak
# 3. 修改vsftpd核心配置文件,开启本地用户登录与写权限
sudo vi /etc/vsftpd.conf
# 4. 找到以下配置项,确保前面无注释符(#),若有则删除,无则手动添加
local_enable=YES # 开启本地用户登录权限(使用Ubuntu系统账号密码)
write_enable=YES # 开启用户写权限,允许上传/修改/删除文件
local_umask=022 # 设置文件上传权限(默认644),避免上传文件无执行权限
dirmessage_enable=YES # 开启目录提示信息
use_localtime=YES # 使用本地时间(默认UTC时间,与Windows时间一致)
xferlog_enable=YES # 开启传输日志,便于排查传输问题
connect_from_port_20=YES # 使用20端口进行数据传输(FTP标准端口)
listen=NO # 关闭独立监听,使用inetd监听
listen_ipv6=YES # 开启IPv6监听,兼容IPv4/IPv6
# 5. 保存并退出vi编辑器
# 6. 重启vsftpd服务,使配置生效
sudo /etc/init.d/vsftpd restart
# 7. 查看服务运行状态,确认是否正常
sudo /etc/init.d/vsftpd status
- 服务正常标识:终端输出active (running),且左侧有绿色指示灯,说明 vsftpd 服务启动成功;
- 常见问题排查:若重启失败,执行sudo cat /var/log/vsftpd.log查看传输日志,根据日志信息排查配置文件语法错误(如少写分号、拼写错误)。
Windows 端:FileZilla 安装与使用
- 打开 FileZilla,点击顶部文件→站点管理器,点击新站点,命名为Ubuntu-IMX6ULL(自定义名称,便于识别);
- 配置连接参数:协议选择FTP – 文件传输协议,主机输入 Ubuntu 的 IP 地址,端口默认 21,登录类型选择正常,用户名输入 Ubuntu 系统登录账号(如ubuntu/linux),密码输入 Ubuntu 登录密码;
- 点击连接,若弹出 **“未知主机密钥”提示,点击确定 ** 即可,首次连接会自动保存密钥,后续无需重复验证。
- 连接成功后,FileZilla 界面分为左右两部分:右侧为本地文件(Windows),左侧为远程文件(Ubuntu);
- 在右侧找到工程目录D:\\IMX6ULL\\led_baremetal,选中start.s和main.c,右键点击上传,即可将文件传输到 Ubuntu 对应目录,传输完成后左侧会显示对应文件。
关键避坑:若连接失败,检查 Ubuntu 防火墙是否开启,执行sudo ufw disable关闭防火墙(开发阶段临时关闭,生产环境需配置防火墙规则开放 21 端口)。
三、核心代码:从底层汇编到 C 语言 LED 精准控制
裸机程序的执行流程为 **“汇编底层初始化→C 语言业务逻辑执行”,处理器上电后首先从 0x00000000 地址执行汇编代码start.s,完成 ARM 架构强制要求的异常向量表构建、处理器模式配置、栈地址初始化、中断状态配置 **,为 C 语言运行搭建完整的硬件环境,随后跳转到 C 语言main.c,执行 GPIO 引脚配置与 LED 周期性闪烁逻辑。两套代码紧密配合,缺一不可,以下是完整可运行代码 + 工业级注释 + 核心逻辑超细节解析,所有代码均可直接复制使用。
(一)start.s:ARM 架构底层初始化代码(汇编核心)
start.s是裸机程序的程序入口文件,处理器上电 / 复位后从 0x00000000 地址开始执行,该文件的核心作用是为 C 语言程序运行搭建基础硬件环境,所有代码均遵循 ARMv7-A 架构规范,无冗余逻辑,完整可运行代码如下:
.global _start ; 声明_start为全局符号,链接器通过该符号定位程序入口地址,必须声明
.extern main ; 声明main为外部符号,来自C语言文件main.c,告诉汇编器该符号在其他文件中定义
; ————————– 异常向量表(ARMv7-A架构强制要求,0x00~0x1C) ————————–
; ARM架构规定:CPU上电/复位后,必须在0x00000000~0x0000001C地址空间配置异常向量表
; 共8个异常向量,每个向量占4字节,对应ARM的8种异常类型,发生异常时CPU自动跳转到对应地址
_start:
ldr pc, =_reset_handler ; 0x00: 复位异常(上电/复位后第一个执行的异常,核心)
ldr pc, =_undef_handler ; 0x04: 未定义指令异常(捕获CPU无法识别的非法指令)
ldr pc, =_software_handler ; 0x08: 软件中断异常(用于系统调用,如Linux的软中断)
ldr pc, =_prefect_handler ; 0x0C: 预取指中止异常(指令读取错误,如地址越界)
ldr pc, =_data_abort_handler ; 0x10: 数据中止异常(数据读写错误,如写只读内存)
nop ; 0x14: 保留地址(ARM架构预留,必须填充nop,避免地址错位)
ldr pc, =_irq_handler ; 0x18: IRQ中断异常(外部设备中断,如按键、定时器)
ldr pc, =_fiq_handler ; 0x1C: FIQ快速中断异常(高优先级中断,如高速传感器)
; ————————– 异常处理函数(暂设死循环,工业开发需完善) ————————–
; 本次实验为基础LED控制,暂未使用复杂异常处理,所有未用到的异常处理函数均设为死循环
; 目的:捕获异常后,防止CPU执行无效指令导致**程序跑飞**,是裸机程序的基础保护机制
; 工业级开发中,需根据异常类型编写专属处理逻辑(如数据备份、错误上报、系统复位)
_undef_handler:
b _undef_handler ; 无条件跳转到自身,实现死循环
_software_handler:
b _software_handler
_prefect_handler:
b _prefect_handler
_data_abort_handler:
b _data_abort_handler
_irq_handler:
b _irq_handler
_fiq_handler:
b _fiq_handler
; ————————– 复位异常处理函数:核心初始化流程(重中之重) ————————–
; 复位异常是上电后第一个执行的异常,所有底层硬件初始化均在此完成,是裸机程序的核心
; 初始化流程:关闭全局中断→配置处理器模式→设置栈地址→开启全局中断→跳转到C语言main函数
_reset_handler:
; 1. 关闭IRQ全局中断(cpsid i),FIQ中断默认关闭
; 指令说明:cpsid = Change Processor State IDisable,i表示IRQ中断,f表示FIQ中断
; 初始化阶段:CPU状态不稳定,栈地址、处理器模式尚未配置,若触发中断会导致程序跑飞
cpsid i
; 2. 切换处理器到IRQ模式(0x12为IRQ模式的固定编码,ARMv7-A架构定义)
; 为IRQ模式配置独立栈地址,避免中断处理时覆盖其他模式的栈数据
cps #0x12
; 3. 设置IRQ模式的栈地址(SP指针),0x82000000为DDR3的空闲安全地址
ldr sp, =0x82000000
; 4. 切换处理器到SYS模式(系统模式,0x1F为固定编码)
; SYS模式是裸机程序主逻辑的默认运行模式,拥有特权模式的所有权限,与USER模式共享寄存器
cps #0x1F
; 5. 设置SYS模式的栈地址,0x84000000与IRQ模式栈地址间隔200MB,实现完全隔离
ldr sp, =0x84000000
; 6. 开启IRQ全局中断(cpsie i)
; 初始化完成后,CPU状态稳定,开启中断以响应外部设备请求(本次实验暂未使用中断,可省略)
cpsie i
; 7. 无条件跳转到C语言main函数,执行LED控制业务逻辑
; b指令:ARM汇编无条件跳转指令,跳转后不返回,符合裸机程序死循环逻辑
; 这一步是**汇编到C语言的关键过渡**,完成底层初始化到上层业务逻辑的切换
b main
; 程序结束后死循环,防止CPU执行无效指令导致跑飞
; 裸机程序无操作系统的进程调度,若main函数意外退出,CPU会继续执行后续内存的无效指令
finish:
b finish
核心逻辑超细节解析
异常向量表的底层要求ARMv7-A 架构强制规定:处理器上电 / 复位后,必须在0x00000000~0x0000001C的 32 字节地址空间配置异常向量表,若未配置或配置不完整,CPU 会因找不到合法的异常处理地址而直接死机。
- 8 个异常向量一一对应 ARM 的 8 种异常类型,是 CPU 处理异常的 “入口导航”,复位异常为第一个向量(0x00),是上电后唯一主动触发的异常;
- 关键指令ldr pc, =_reset_handler:为绝对跳转指令,将复位异常处理函数的物理地址加载到程序计数器(PC),区别于b _reset_handler的相对跳转(仅能跳转到 ±32MB 范围内),异常向量表必须使用绝对跳转,确保异常处理函数可在任意内存地址;
- 预留地址nop:0x00000014 地址是 ARM 架构的硬件预留位,必须填充空指令nop(占 4 字节),否则会导致后续的 IRQ/FIQ 向量地址错位,CPU 无法正确识别异常类型。
ARM 处理器的 7 种工作模式与权限分级ARMv7-A 架构设计有7 种工作模式,分为特权模式(6 种)和用户模式(1 种),不同模式拥有独立的寄存器组(如 SP 栈指针、LR 链接寄存器),核心区别在于权限等级与使用场景,具体如下表(嵌入式开发核心常用模式):
| USER(用户模式) | 0x10 | 普通权限 | 运行操作系统用户态应用程序 | 无独立寄存器,与 SYS 模式共享 |
| IRQ(中断模式) | 0x12 | 特权权限 | 处理普通外部中断(按键、定时器、串口) | 有独立的 R13/R14/SP/CPSR |
| SVC(超级用户模式) | 0x13 | 最高权限 | 系统初始化、操作系统内核、软中断处理 | 有独立的 R13/R14/SP/CPSR |
| SYS(系统模式) | 0x1F | 特权权限 | 运行裸机程序主逻辑、操作系统内核 | 与 USER 模式共享寄存器,拥有特权权限 |
核心设计原则:不同特权模式必须配置独立的栈地址(SP),本次实验为 IRQ 模式和 SYS 模式配置了不同的栈地址,若共用栈地址,当 IRQ 中断发生时,中断处理函数的栈操作会覆盖 SYS 模式的栈数据,导致用户程序崩溃,这是嵌入式裸机开发的核心避坑点。
栈地址的选择依据与内存分布IMX6ULL 的 DDR3 内存物理地址范围为0x80000000~0x9FFFFFFF,总大小 512MB,栈地址的选择需遵循三个核心原则:① 避开程序代码加载地址;② 避开外设寄存器地址;③ 不同模式的栈地址间隔足够大,避免栈溢出。
- IRQ 模式栈地址:0x82000000,位于 DDR3 前端空闲区域,远离代码加载地址,用于中断处理的栈空间;
- SYS 模式栈地址:0x84000000,与 IRQ 模式栈地址间隔 200MB,完全隔离,足够满足裸机程序的栈空间需求(裸机程序的栈空间一般不超过 1MB);
- 程序代码加载地址:0x87800000(Makefile 中通过 – Ttext 指定),栈地址均避开该区域,避免栈数据与程序代码冲突;
- 外设寄存器地址:0x02000000~0x02FFFFFF,与 DDR3 内存地址完全分离,无冲突风险。
汇编到 C 语言的过渡条件C 语言程序的运行需要完整的运行时环境,核心是栈地址(SP)的有效配置,因为 C 语言的函数调用、局部变量存储、参数传递、返回值保存均依赖栈实现。
- 若未配置栈地址,跳转到 C 语言 main 函数后,CPU 会因无法找到栈空间而触发数据中止异常,程序跑飞;
- start.s的核心目标就是为 C 语言配置好栈地址、处理器工作模式、全局中断状态,当这些初始化完成后,通过b main指令跳转到 C 语言入口,实现汇编到 C 的无缝过渡,这是所有裸机程序的通用初始化逻辑。
(二)main.c:GPIO 寄存器操作与 LED 闪烁逻辑(C 语言核心)
main.c是裸机程序的业务逻辑入口,核心功能是通过直接操作物理寄存器完成 GPIO1_IO03 引脚的全配置,实现 LED 的周期性闪烁。代码采用模块化封装设计,将寄存器操作、LED 初始化、LED 控制、延时功能拆分为独立函数,兼顾可读性、可维护性与可扩展性,所有寄存器地址、配置值均严格遵循《IMX6ULL 参考手册》Chapter28(GPIO)与 Chapter32(IOMUXC)的官方定义,无自定义魔法数字,完整可运行代码如下:
#include <stdint.h> // 引入C99标准整数类型,替代int/long,增强代码可移植性与可读性
// ————————– 寄存器物理地址定义(严格遵循IMX6ULL参考手册) ————————–
// 引脚复用配置寄存器:GPIO1_IO03功能选择,地址:0x020E0068(Chapter32 IOMUXC)
#define IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03 ((volatile uint32_t*)0x020E0068)
// 引脚电气特性配置寄存器:GPIO1_IO03驱动能力/上下拉,地址:0x020E02F4(Chapter32 IOMUXC)
#define IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03 ((volatile uint32_t*)0x020E02F4)
// GPIO方向配置寄存器:GPIO1端口所有引脚输入/输出模式,地址:0x0209C004(Chapter28 GPIO)
#define GPIO1_GDIR ((volatile uint32_t*)0x0209C004)
// GPIO数据寄存器:GPIO1端口所有引脚输出电平控制,地址:0x0209C000(Chapter28 GPIO)
#define GPIO1_DR ((volatile uint32_t*)0x0209C000)
// ————————– 寄存器操作函数封装(简化代码,统一接口) ————————–
// 写寄存器:将值val写入寄存器reg指向的物理地址,static inline避免函数调用开销
static inline void reg_write(volatile uint32_t* reg, uint32_t val) {
*reg = val;
}
// 读寄存器:读取寄存器reg指向的物理地址的值并返回
static inline uint32_t reg_read(volatile uint32_t* reg) {
return *reg;
}
// ————————– 毫秒级延时函数(适配IMX6ULL 800MHz主频) ————————–
// 延时原理:基于CPU主频的空循环,消耗固定时钟周期实现软件延时
// 800MHz主频:CPU每秒执行800,000,000条指令,每条空循环指令约占1个时钟周期
// 1ms理论循环次数:800MHz * 0.001 = 800,000次,实际无需精准,满足视觉效果即可
static void delay_ms(uint32_t ms) {
for (uint32_t i = 0; i < ms * 800000; i++);
}
// ————————– LED初始化函数(GPIO配置三步法,工业级规范) ————————–
// 功能:完成GPIO1_IO03引脚的复用配置、电气特性配置、方向配置,为LED控制做准备
void led_init(void) {
// 步骤1:复用功能配置——将GPIO1_IO03引脚设为纯GPIO功能,配置值0x05
reg_write(IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03, 0x05);
// 步骤2:电气特性配置——20mA驱动、上拉使能、慢速压摆率,配置值0x10B0
reg_write(IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03, 0x10B0);
// 步骤3:GPIO方向配置——将GPIO1_IO03设为输出模式(仅修改bit3,保留其他位默认值)
reg_write(GPIO1_GDIR, reg_read(GPIO1_GDIR) | (1 << 3));
}
// ————————– LED控制函数(模块化封装,便于调用与拓展) ————————–
// LED点亮:GPIO1_IO03输出低电平(仅将bit3置0,其他位不变)
static void led_on(void) {
reg_write(GPIO1_DR, reg_read(GPIO1_DR) & ~(1 << 3));
}
// LED熄灭:GPIO1_IO03输出高电平(仅将bit3置1,其他位不变)
static void led_off(void) {
reg_write(GPIO1_DR, reg_read(GPIO1_DR) | (1 << 3));
}
// ————————– 主函数(程序业务逻辑入口) ————————–
int main(void) {
led_init(); // 初始化LED对应的GPIO引脚,必须先初始化再控制,顺序不可颠倒
// 死循环实现LED周期性闪烁:1秒亮,1秒灭
// 裸机程序无操作系统调度,死循环保证程序一直运行,不会退出
while (1) {
led_on(); // 点亮红色LED
delay_ms(1000); // 延时1000毫秒(1秒)
led_off(); // 熄灭红色LED
delay_ms(1000); // 延时1000毫秒(1秒)
}
return 0; // 理论上不会执行到此处,因为while(1)是死循环
}
核心逻辑超细节解析
寄存器地址定义的核心规范所有寄存器地址均为 IMX6ULL 的物理地址,由 NXP 官方在芯片设计时固化,直接映射到芯片的硬件寄存器,通过 C 语言指针可实现对硬件的直接、无中介控制,这是裸机开发与操作系统开发的核心区别(操作系统开发使用虚拟地址)。
- volatile uint32_t*的三重意义:① uint32_t:IMX6ULL 的所有寄存器均为32 位宽度,使用 C99 标准 32 位无符号整数类型,匹配寄存器宽度,避免数据截断或类型不匹配;② volatile:嵌入式开发核心关键字,不可省略,告诉编译器 “该变量(寄存器)的值可能被硬件自发修改,不要进行缓存优化、指令重排”,若省略,编译器会将寄存器读写优化为普通内存读写,导致读取的是缓存的旧值,而非硬件的实时值,代码完全失效;③ *:将 16 进制物理地址转换为32 位无符号整数指针,通过指针解引用(*reg)实现对寄存器的读写操作,这是 C 语言操作硬件寄存器的标准方法。
- 宏定义封装:使用#define定义寄存器地址,避免代码中出现魔法数字,若后续需要修改引脚,只需修改宏定义的地址,无需修改所有代码,提升代码可维护性。
寄存器操作函数封装的优势封装reg_write和reg_read函数,替代直接的指针解引用操作,核心优势有三点:① 简化代码:避免重复编写*reg = val和return *reg,让代码更简洁;② 统一接口:所有寄存器操作均通过统一接口完成,若后续需要添加寄存器操作的日志、校验、容错功能,只需修改这两个函数,无需修改所有代码;③ 提升效率:使用static inline关键字,static表示函数仅在本文件可见,避免命名冲突;inline表示编译器将函数代码内联到调用处,避免函数调用的栈开销,提升代码执行效率,适合裸机开发的高性能需求。
GPIO 配置三步法(工业级通用规范,缺一不可)IMX6ULL 的 GPIO 引脚控制必须遵循 **“复用功能配置→电气特性配置→GPIO 方向配置”** 的三步法,顺序不可颠倒,每一步都有明确的硬件意义,任何一步缺失或配置错误,都会导致 LED 无法正常工作,这是所有 SoC 多功能引脚控制的通用规范。
步骤 1:复用功能配置(IOMUXC_SW_MUX_CTL_PAD_GPIO1_IO03,配置值 0x05)
该寄存器为引脚复用控制寄存器,核心作用是指定多功能引脚的工作模式,仅低 4 位(bit0~bit3,MUX_MODE)有效,其他位为保留位(默认 0),配置值 0x05 的二进制解析如下:
| 配置值 | 0101(0x05) | 0 | 0 | 0 |
| 功能含义 | 配置为 GPIO1_IO03 功能 | 无意义,默认 0 | 关闭 SION | 无意义,默认 0 |
- 关键意义:该寄存器的默认值为 0x00(ALT0,SPI1_SCK 功能),若不主动配置为 0x05,GPIO1_IO03 引脚会被分配给 SPI1 外设,此时引脚的电平由 SPI1 控制器控制,软件无法通过 GPIO 寄存器修改,LED 自然无法点亮;
- SION 位(bit15):用于开启引脚的信号输入功能,本次为 GPIO 输出模式,无需开启,设为 0 即可。
步骤 2:电气特性配置(IOMUXC_SW_PAD_CTL_PAD_GPIO1_IO03,配置值 0x10B0)
该寄存器为引脚电气属性控制寄存器,核心作用是配置引脚的驱动能力、上下拉电阻、压摆率、迟滞特性、开路检测等电气参数,这些参数直接决定引脚的电气性能,配置值 0x10B0 为十六进制,转换为 32 位二进制后仅低 16 位有效,高 16 位为 0,有效位详细解析如下(最核心的 6 个位段):
| HYS(迟滞特性) | bit0~3 | 0000 | 0 | 关闭迟滞特性 | 输出模式无需迟滞,关闭减少功耗 |
| SPEED(速度等级) | bit4~6 | 001 | 1 | 中速(100MHz) | 匹配 GPIO 低速输出场景,避免信号失真 |
| DRIVE(驱动能力) | bit7~8 | 01 | 1 | 20mA 驱动能力 | 匹配 LED 的工作电流,保证稳定点亮 |
| PULL/PUSH(上下拉) | bit9~11 | 10 | 2 | 上拉电阻使能 | 避免引脚未输出时电平随机浮动,防止 LED 无故闪烁 |
| OE(开路检测) | bit12 | 0 | 0 | 禁用开路检测 | 输出模式无需开路检测,关闭减少硬件开销 |
| SRE(压摆率) | bit13 | 0 | 0 | 慢速压摆率 | 降低引脚电平变化速度,减少电磁干扰(EMI) |
核心参数说明:
- 驱动能力(DRIVE):00=10mA,01=20mA,10=30mA,11=40mA,本次配置 20mA,是 GPIO 引脚的安全最大灌电流,既满足 LED 点亮需求,又不超过引脚的硬件极限;
- 上下拉电阻(PULL/PUSH):00 = 无上下拉,01 = 下拉,10 = 上拉,11 = 保留,上拉电阻可将引脚在未输出时保持高电平,避免因引脚悬空导致的电平抖动,是嵌入式引脚配置的常规操作;
- 压摆率(SRE):0 = 慢速,1 = 快速,慢速压摆率可降低电磁干扰,适合低速控制的 LED、按键等场景,高速通信场景(如 UART/SPI)可配置为快速压摆率。
步骤 3:GPIO 方向配置(GPIO1_GDIR,仅修改 bit3)
该寄存器为GPIO 方向寄存器,控制 GPIO1 端口32 个引脚的输入 / 输出模式,位与引脚一一对应:bitn 对应 GPIO1_IOn 引脚,配置规则为:
- bitn = 1:GPIO1_IOn 引脚为输出模式,CPU 可主动控制引脚输出高 / 低电平;
- bitn = 0:GPIO1_IOn 引脚为输入模式,CPU 只能读取引脚的外部电平,无法主动输出。
本次控制 GPIO1_IO03 引脚,对应bit3,配置代码为reg_read(GPIO1_GDIR) | (1 << 3),该代码是嵌入式寄存器位操作的标准写法,核心优势是:① 先通过reg_read(GPIO1_GDIR)读取寄存器的当前默认值,保留其他 31 位的原始配置;② 再通过| (1 << 3)将仅 bit3 置 1,其他位保持不变;③ 避免了直接写固定值(如reg_write(GPIO1_GDIR, 0x08))导致的GPIO1 端口其他 31 个引脚的方向被错误修改,防止影响其他外设的正常工作。
GPIO 数据寄存器(GPIO1_DR)与 LED 电平控制GPIO1_DR 寄存器为GPIO 数据寄存器,与 GPIO1_GDIR 寄存器的位定义完全一致(bitn 对应 GPIO1_IOn 引脚),用于控制 GPIO 输出模式引脚的电平状态,规则如下:
- bitn = 1:GPIO1_IOn 引脚输出高电平(3.3V);
- bitn = 0:GPIO1_IOn 引脚输出低电平(0V)。
结合 LED 的灌电流驱动硬件逻辑,实现 LED 的点亮与熄灭,位操作标准写法解析:
- 点亮(led_on):需要 GPIO1_IO03 输出低电平→ 将 bit3 置 0→ 代码:reg_read(GPIO1_DR) & ~(1 << 3)
- 1 << 3:生成仅 bit3 为 1 的掩码(0x08);
- ~(1 << 3):对掩码取反,生成仅 bit3 为 0、其他位为 1 的掩码;
- &:与操作,仅将 GPIO1_DR 的 bit3 置 0,其他位保留原始值;
- 熄灭(led_off):需要 GPIO1_IO03 输出高电平→ 将 bit3 置 1→ 代码:reg_read(GPIO1_DR) | (1 << 3)
- 1 << 3:生成仅 bit3 为 1 的掩码;
- |:或操作,仅将 GPIO1_DR 的 bit3 置 1,其他位保留原始值。
这两种位操作是嵌入式开发中寄存器特定位置 0 / 置 1的通用方法,适用于所有 SoC 的寄存器位操作,必须熟练掌握,核心原则是 **“修改指定位,保留其他位”**。
软件延时函数的原理与局限性本次采用基于 CPU 主频的空循环软件延时,原理是利用 CPU 的时钟周期,通过空循环for (i=0; i<N; i++)消耗固定的时钟周期,实现毫秒级延时。
- 计算依据:IMX6ULL 商业级主频为 800MHz,即 CPU 每秒执行 800,000,000 条指令,每条空循环指令(i++)约占 1 个时钟周期,因此 1ms 需要 800,000 次循环;
- 局限性:软件延时的精度较低(误差约 ±10%),受编译器优化、CPU 负载、指令执行效率影响,实际延时时间与理论值存在偏差;同时空循环会占用 CPU 全部资源,导致 CPU 无法执行其他任务;
- 工业级替代方案:使用 IMX6ULL 的GPT 通用定时器或SysTick 系统定时器实现微秒级精准延时,定时器延时基于硬件时钟,不受软件因素影响,精度可达 1us,且延时过程中 CPU 可执行其他任务,提升系统效率。
模块化封装设计的工业级意义代码将 LED 控制拆分为led_init、led_on、led_off独立函数,而非将所有逻辑写在 main 函数中,这是工业级嵌入式代码的标准设计规范,核心优势:① 高内聚低耦合:每个函数只负责一个单一功能,逻辑清晰,便于理解、调试与维护;② 可扩展性强:若后续需要控制多个 LED 灯,只需复制这些函数,修改对应的寄存器地址与引脚位即可,无需重构整体逻辑;③ 代码复用性高:后续开发其他外设(如按键、蜂鸣器、继电器)时,可复用寄存器操作、延时函数等通用模块;④ 便于团队协作:模块化代码的接口清晰,不同开发人员可负责不同模块,提升开发效率。
四、核心技术解析:底层原理与通用设计规范
本次实验的核心不仅是实现 LED 闪烁的功能,更在于理解嵌入式裸机开发的底层原理与工业级通用设计规范,这些原理与规范适用于所有嵌入式裸机开发场景(如按键、串口、SPI、I2C 等),是搭建嵌入式开发知识体系的基础,也是从 “新手” 到 “专业嵌入式工程师” 的核心跨越。
(一)SoC 多功能引脚配置的三大核心步骤(通用规范)
所有基于 SoC 的嵌入式开发,其多功能引脚控制均需遵循 **“复用功能配置→电气特性配置→外设功能配置”** 的三大核心步骤,本次实验的 GPIO 配置是该规范的典型应用,三步法的底层逻辑与通用要求如下:
复用功能配置(IOMUXC 寄存器)
- 核心目标:将多功能引脚唯一分配给目标外设(如 GPIO、UART、SPI、I2C),解决 “一个引脚对应多个外设” 的硬件复用问题;
- 底层逻辑:SoC 内部为每个多功能引脚设计了多路选择器(MUX),通过复用寄存器的 MUX_MODE 位段可控制多路选择器的开关,将引脚的物理链路连接到目标外设的控制器;
- 通用要求:配置值必须严格遵循 SoC 参考手册,不同外设对应不同的 MUX_MODE 值,不可随意配置,且一个引脚同一时间只能分配给一个外设。
电气特性配置(IOMUXC_PAD 寄存器)
- 核心目标:配置引脚的电气参数(驱动能力、上下拉、压摆率等),保证引脚与外设之间的电气匹配,让引脚稳定工作;
- 底层逻辑:引脚的电气参数决定了其信号传输特性,若电气参数与外设不匹配,会导致信号失真、电平浮动、设备损坏等问题;
- 通用要求:根据外设的工作特性配置参数,如 LED / 按键等低速外设配置低驱动能力、慢速压摆率、上拉 / 下拉使能;UART/SPI 等高速通信外设配置高驱动能力、快速压摆率、无上下拉(由通信协议保证电平)。
外设功能配置(外设专用寄存器)
- 核心目标:通过目标外设的专用寄存器,配置外设的工作模式、功能参数,实现对具体外设的精准控制;
- 底层逻辑:引脚仅为物理传输链路,真正的功能控制由 SoC 内部的外设控制器实现,外设控制器通过专用寄存器进行配置;
- 通用要求:按外设的功能需求进行针对性配置,如 GPIO 配置方向 / 电平、UART 配置波特率 / 数据位 / 停止位、SPI 配置时钟 / 极性 / 相位,且必须在引脚复用与电气特性配置完成后进行,否则外设控制器无法控制引脚。
核心原则:三步配置的顺序不可颠倒,必须先完成引脚的复用与电气特性配置,再进行外设功能配置,否则外设控制器无法与引脚建立有效连接,配置完全无效。
(二)嵌入式交叉编译工具链的分工与完整工作流程
嵌入式裸机开发的编译工具链为ARM-Linux 交叉编译工具链,核心由 ** 编译器(gcc)、链接器(ld)、格式转换器(objcopy)、反汇编器(objdump)** 四大工具组成,四大工具各司其职,形成一个完整的编译链路,将人类可读的汇编 / C 代码转换为开发板可直接运行的二进制代码。工具链的完整工作流程为:
start.s + main.c → 编译器(gcc)→ 目标文件(start.o + main.o)→ 链接器(ld)→ ELF可执行文件(led.elf)→ 格式转换器(objcopy)→ 二进制文件(led.bin)
↓
反汇编器(objdump)→ 反汇编文件(led.dis)
四大核心工具的超细节分工与作用
| 编译器 | gcc | GNU Compiler Collection | 1. 对汇编文件(.s):汇编→将汇编指令转换为机器码;2. 对 C 文件(.c):预处理→编译→汇编→完成语法检查、宏展开、代码优化,转换为机器码;3. 为目标文件添加符号表、调试信息。 | start.s、main.c | start.o、main.o | -c(仅编译 / 汇编不链接)-g(保留调试信息)-march=armv7-a(指定 ARM 架构)-O0(关闭优化,调试必备) |
| 链接器 | ld | Linker | 1. 合并多个目标文件(.o)的代码段、数据段、bss 段;2. 分配程序运行的物理地址(通过 – Ttext 指定);3. 解决目标文件之间的符号引用(如 main 函数、_start 全局符号);4. 生成完整的 ELF 格式可执行文件。 | start.o、main.o | led.elf | -Ttext 0x87800000(指定程序运行起始地址,IMX6ULL 固定) |
| 格式转换器 | objcopy | Object Copy | 1. 解析 ELF 文件的段结构,提取纯机器码与数据;2. 去除 ELF 文件中的符号表、调试信息、段表、注释等冗余内容;3. 生成纯二进制文件(.bin),开发板 BootLoader 可直接加载运行。 | led.elf | led.bin | -O binary(指定输出格式为二进制)-S(去除符号表)-g(去除调试信息) |
| 反汇编器 | objdump | Object Dump | 1. 解析 ELF 文件的机器码,将其反汇编为可读的 ARM 汇编代码;2. 生成反汇编文件(.dis),包含地址、机器码、汇编指令三者的对应关系;3. 便于开发者调试代码逻辑、排查地址错误、验证编译结果。 |






评论前必须登录!
注册