 网硕互联帮助中心
网硕互联帮助中心
一、从“概念”到“工具”:人形机器人的身份转变
我最早接触人形机器人,是在2016年的东京机器人展上。本田的ASIMO能走路、跳舞、端咖啡,但展台周围永远拉着警戒线——“请勿靠近,仅供展示”。
那时的机器人,更像是“科技吉祥物”。
但2026年的CES彻底改变了这一印象。优必选展台上,一台Walker机器人正自主完成一套复杂操作:
整个过程无人遥控、无预设轨迹——完全基于实时视觉感知和自主决策。
“这标志着人形机器人从‘展示品’变成了‘生产力工具’,”优必选首席科学家周博士在电话采访中说,“关键突破在于具身智能(Embodied AI):让AI拥有了身体,能感知物理世界并与之互动。”
更令人惊讶的是商业化速度。就在CES期间,宇树科技宣布获得万台级工业订单,客户包括富士康、比亚迪等制造业巨头。
“我们签的是‘机器人租赁合同’,”宇树科技CEO王总透露,“企业不用一次性购买,而是按月支付服务费。这大大降低了使用门槛。”
二、技术拆解:具身智能的“三脑协同”架构
人形机器人之所以难,是因为它需要同时解决三大问题:
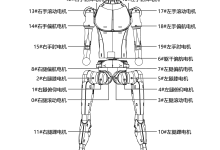
我拿到了优必选Walker机器人的系统框图:
感知层:
– 双目深度相机(1920×1080,30fps)
– 激光雷达(360°,10Hz)
– 六维力传感器(腕部、脚部)
– 麦克风阵列(4麦)
决策层:
– 具身大模型(参数量:10B,专门训练)
– 运动规划引擎(实时避障)
– 任务调度器(多任务并行)
执行层:
– 伺服关节(全身41个自由度)
– 灵巧手(5指,11自由度)
– 平衡控制器(ZMP算法)
“核心创新在感知-决策-执行的闭环优化,”周博士解释,“传统机器人是‘流水线作业’:感知→规划→执行,每个环节独立优化。我们是‘端到端联合优化’。”
他举了个例子:抓取水杯时,传统方案先识别水杯位置,再规划手臂轨迹,最后执行抓取。如果中途水杯被碰倒,整个流程要从头开始。
具身智能方案则是预测性控制:在伸手过程中,实时预测水杯可能的状态变化(如被碰倒),提前调整轨迹。“就像人类接飞盘时的预判。”
三、产业落地:从“工厂”到“家庭”的渐进路径
跟多家机器人公司交流后,我发现了清晰的商业化节奏:
第一阶段(2026-2028):工业场景优先
“人形机器人的第一个‘主战场’是3D(Dull脏、Dangerous危险、Difficult困难)场景,”宇树科技王总说。
他列举了具体应用:
- 汽车制造:车身内部线束安装(空间狭窄,人类操作困难)
- 电力巡检:变电站设备检查(高压环境,危险)
- 物流分拣:不规则物品抓取(重复劳动,枯燥)
“工业场景对成本相对不敏感,”他分析,“一台机器人替代两个工人,两年回本企业就愿意投入。”
第二阶段(2029-2031):专业服务拓展
“第二波机会在专业服务领域,”小米机器人团队负责人张工预测。
他看好的方向:
- 医疗辅助:帮助行动不便者起床、翻身
- 教育陪伴:儿童编程教学、语言练习
- 商业服务:商场导购、酒店接待
“这些场景对机器人的‘亲和力’要求更高,”张工说,“不能太机械,要有情感交互能力。”
第三阶段(2032-2035):家庭普及
“终极目标是家庭机器人,”周博士展望,“但这条路还很长。”
核心挑战:
- 成本:目前工业版机器人单价约¥50万,家庭需降到¥5万以下
- 安全性:家庭环境复杂,必须有防碰撞、防夹等安全设计
- 易用性:普通用户不可能编程,必须“开箱即用”
“乐观估计,2035年可能会有10%的家庭拥有服务机器人,”周博士说,“就像现在扫地机器人的普及率。”
四、技术人的实战:机器人编程的“新范式”
我通过云平台接入了一台优必选Walker机器人的测试权限,尝试了一些编程实验:
传统示教编程 vs 自然语言编程
# 传统方式:需要精确控制每个关节
import robotic_lib as rl
robot = rl.Walker()
# 移动到目标位置(需计算逆运动学)
joint_angles = robot.calculate_ik(target_pose)
robot.move_joints(joint_angles, speed=0.5)
# 新方式:自然语言指令
from embodied_ai import RobotAssistant
assistant = RobotAssistant()
instruction = "请走到桌子旁边,拿起上面的红色杯子"
result = assistant.execute(instruction)
print(f"执行结果: {result['status']}")
具身大模型的实时交互
我测试了机器人的多模态理解能力:
我(语音):“请看看房间里有什么蓝色的物体。”
机器人(转头扫描):“检测到三个蓝色物体:1. 墙上的海报;2. 书桌上的文件夹;3. 椅子上的靠垫。”
我:“请把文件夹拿给我。”
机器人(走向书桌,抓取文件夹,转身递出):“给您。”
整个过程无需任何编程——机器人基于视觉-语言对齐的大模型理解指令,自主规划动作。
“这代表了机器人编程的‘范式转移’,”周博士总结,“从‘专家编程’到‘自然交互’,使用门槛降低了几个数量级。”
五、生态竞争:中美机器人产业的“路线分歧”
观察中美机器人企业,我发现明显的路线差异:
美国路线(以Tesla Optimus为代表):
- 技术路径:纯视觉(无激光雷达),端到端神经网络
- 商业化:先家庭,后工业(马斯克目标:年产百万台家庭机器人)
- 定价策略:激进低价(目标<$2万)
中国路线(优必选、宇树等):
- 技术路径:多传感器融合(视觉+激光雷达+力觉)
- 商业化:先工业,后家庭(用工业利润反哺技术迭代)
- 定价策略:合理利润(工业版¥50万,逐步降价)
“两条路线都有道理,”资深机器人分析师刘总评论,“美国赌的是‘规模效应’——用海量家庭机器人摊薄研发成本;中国选的是‘技术迭代’——用工业场景的稳定需求打磨可靠性。”
他预测:“未来5年,中国市场可能会占据全球人形机器人出货量的40%以上——因为我们有世界最大的制造业生态。”
六、未来展望:2026-2030机器人产业“关键节点”
基于行业信息,我整理了未来五年的里程碑:
2026年:工业机器人首批量产交付(万台级订单)
2027年:成本降低30%,专业服务机器人试点
2028年:家庭机器人原型发布,价格降至¥20万以内
2029年:机器人操作系统生态初步形成
2030年:全球年出货量突破100万台,产业进入快速增长期
“2030年可能是‘机器人普及元年’,”王总预测,“就像2010年是智能手机普及元年一样。”
七、写在最后:技术向善的“机器人伦理”
测试完机器人后,我一直在思考一个问题:机器人普及后,人类的价值在哪里?
一位社会学教授的观点让我印象深刻:“工业革命解放了人类的体力,信息革命解放了人类的脑力。机器人革命,可能让我们重新思考——什么是只有人类能做的?”
是创造力?是情感连接?是道德判断?还是对生命意义的追寻?
作为技术人,我创造工具,但也思考工具的影响。机器人不是目的,而是手段——让我们更专注于‘人之所以为人’的独特价值。
特别感谢优必选、宇树科技提供的技术接入和工程师访谈。也感谢社会学教授的跨学科视角。
机器人的进化,本质是人类自我认知的延伸。从石器到机器人,我们一直在寻找更好的“延伸自我”的方式。
这一次,我们延伸的是智能本身。




评论前必须登录!
注册