 网硕互联帮助中心
网硕互联帮助中心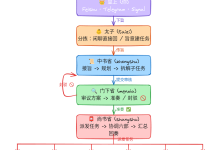
当赛博皇上给Ai设立三省六部
摘要:大模型处理复杂工程任务的极限在哪里?答案是“团队协作”。本文将带你实操一套将中国古代“三省六部制”精髓融入多智能体...
摘要:大模型处理复杂工程任务的极限在哪里?答案是“团队协作”。本文将带你实操一套将中国古代“三省六部制”精髓融入多智能体...

一、从“概念”到“工具”:人形机器人的身份转变 我最早接触人形机器人,是在2016年的东京机器人展上。本田的ASIMO能走路、跳舞、...
人工智能几个发展方向的分析 一、摘要 本文是以人工智能发展方向来展开一些看法,此种不包含硬件软件等等基础建设的具体事物,仅仅是走向的问题考虑,这一些考...
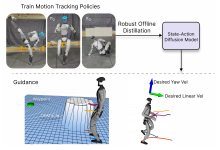
0. 前言 让人形机器人学会跳舞,听起来像是科幻电影中的场景,但在强化学习和运动模仿技术的推动下,这件事正在变得越来...

第一节:LiDAR的工作逻辑和算法及其前沿一、工作逻辑:LiDAR如何感知世界LiDAR通过激光束探测目标物的距离、方位、高度等信息...
Unitree RL GYM Unitree RL GYM 是一个基于 Unitree 机器人平台和Isaac Gym仿真的强化学习示例仓库,支...
ROS2中的多节点通信优化:基于参数服务器与服务调用的协同机制设计 在机器人操作系统(ROS)的发展历程中...

Femto Mega内置Jetson Nano算力平台第一节:奥比中光Femto Mega功能特征及技术演进奥比中光Femto Mega作为一款由...
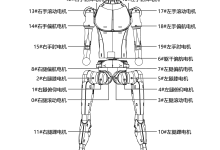
在人形格斗机器人中,舵机(伺服电机)是实现动作执行的核心执行器。早期 Robot 采用“菊花链”串行拓扑——主控通过单...
深度强化学习全栈指南:从理论原理到机器人实战 摘要:本文系统梳理强化学习(Reinforcement Learnin...
