 网硕互联帮助中心
网硕互联帮助中心
第一节:LiDAR的工作逻辑和算法及其前沿
一、工作逻辑:LiDAR如何感知世界
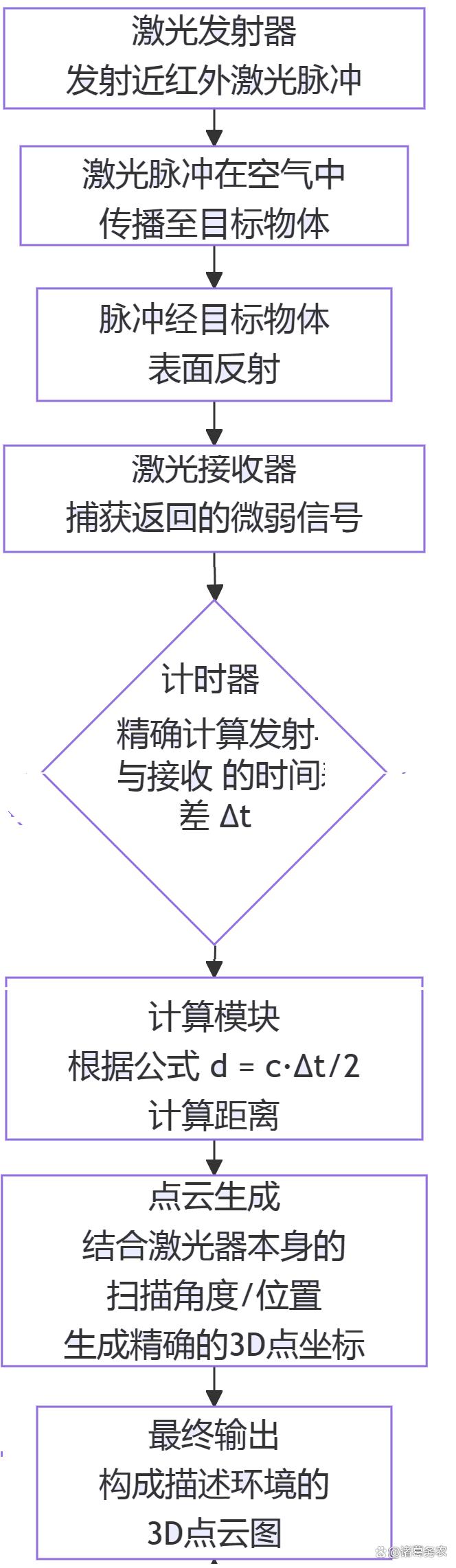
LiDAR通过激光束探测目标物的距离、方位、高度等信息,其核心是测量激光信号从发射到被目标物反射回来的时间差(Time of Flight, ToF),再结合光学机械扫描部件,就能计算出目标物的三维空间信息。
(一)基本公式:距离 (d) = (光速 (c) × 飞行时间 (t)) / 2。除以2是因为激光是往返。
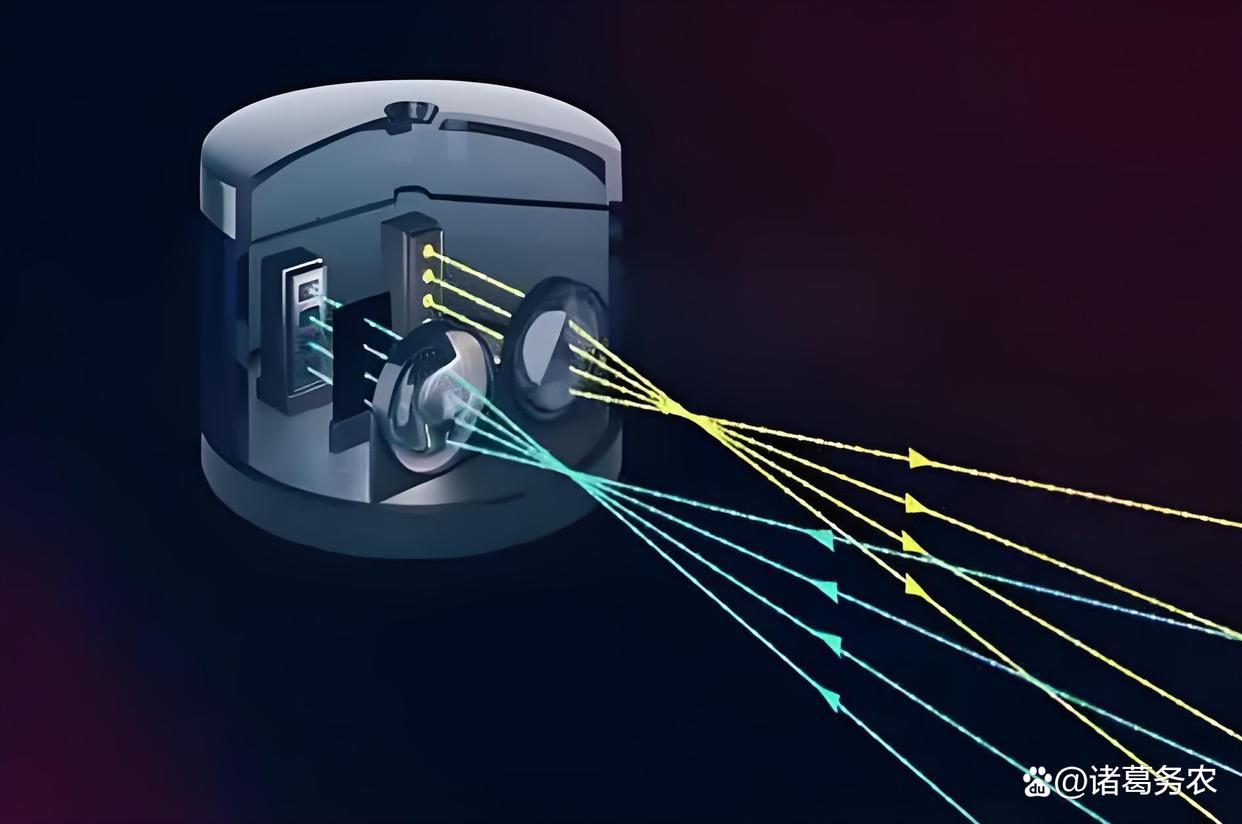
(二)系统组成:一套完整的LiDAR系统通常包含:
激光发射系统:激光器(如905nm或1550nm半导体激光器)、光学镜头。
激光接收系统:探测器(如APD雪崩光电二极管、SPAD单光子雪崩二极管)、光学滤光片。
信号处理与控制系统:时间数字转换器(TDC,核心计时部件)、扫描机构。
(三)扫描方式:为了获得空间视角,LiDAR需要对激光束进行扫描。主要分为:
1. 机械旋转式:
通过旋转发射和接收模块实现360°扫描,技术成熟但成本高、有磨损。
2. 固态/半固态式:
当前发展和应用的重点,可靠性高。主要包括:
MEMS(微机电系统):通过微振镜反射激光束进行扫描。
光学相控阵(OPA):通过改变大量天线元件的相位来控制激光束方向,纯固态。
Flash(闪光):类似相机闪光灯,一次发射覆盖整个视场,无需扫描,但功率分散,测距短。
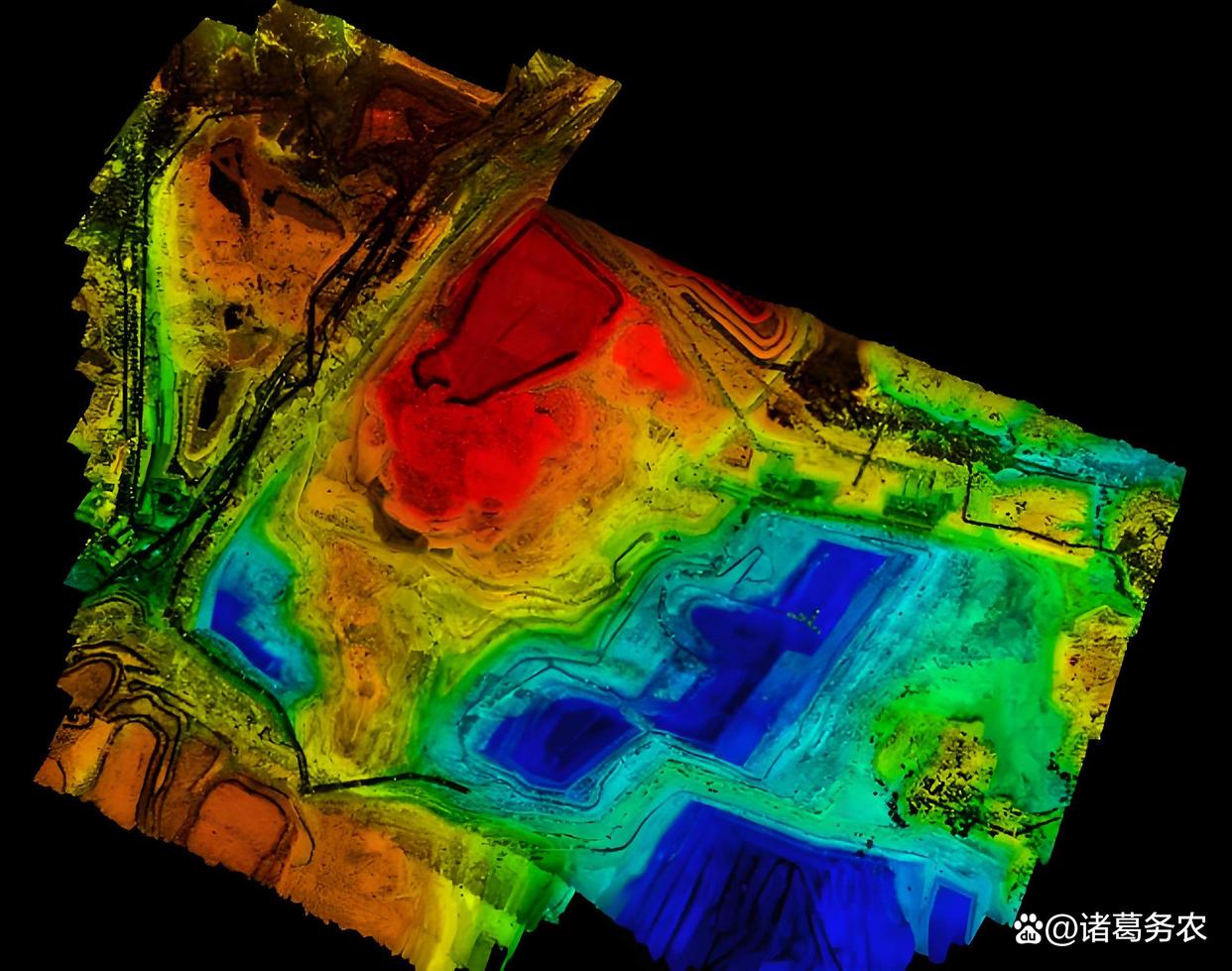
二、核心算法:从点云数据到有用信息
LiDAR获取的原始数据是海量的三维点云,需要算法进行处理和解析。
1. 点云分割与分类:
将点云数据中的不同物体(如车辆、行人、树木、地面)分离并识别出来。例如,HiLoTs框架通过圆柱体裁剪网络处理点云近密远疏的特性,并采用“高-低时间敏感”双流处理机制,兼顾近场物体的稳定特征和远场物体的快速变化特性,有效降低了标注成本并提升了分割精度。
2. 点云配准:
将不同时间、角度或传感器获取的多帧点云精确对齐到同一坐标系。ICP(迭代最近点) 及其变种(如Point-to-Plane ICP)是精配准的常用算法。为提升配准效率和准确性,有方法利用场景固有特征(如森林中树木的分支结构)进行无标记自动粗配准,再结合ICP精配准。也有研究探索将3D点云投影至2D图像进行快速配准的策略。
3. 多模态融合:
LiDAR点云提供精确的几何信息,但缺乏纹理和颜色信息。与摄像头图像融合能互补优势。例如,LGMMFusion框架利用LiDAR提供的深度信息先验,来引导图像生成更高质量的特征,再通过交叉注意力机制进行融合,显著提升了3D物体检测的精度,特别是对小物体的检测效果。
三、开发平台与软件生态系统
强大的硬件需要软件和开发工具的支撑。
1. 原型开发与硬件平台:
ADI开源LiDAR原型平台:提供了包含光接收和发送信号链、FPGA接口乃至光学器件的模块化硬件设计,以及开源软件堆栈和HDL参考设计,旨在帮助开发者快速构建LiDAR系统原型,缩短研发周期。
2. 软件库与框架:
PCL(Point Cloud Library):处理点云数据的开源库,涵盖了点云滤波、特征提取、配准、分割等多种常用算法,是许多LiDAR相关应用和研究的基础。
LiDAR4D:一个旨在简化LiDAR数据采集、处理和可视化过程的开源项目,支持与GPS和IMU数据集成,并提供了基于Qt得3D可视化界面。
NVIDIA Isaac 机器人平台:对于机器人应用,特别是基于NVIDIA Jetson系列高性能计算平台(如最新的Jetson AGX Thor) 的开发,Isaac提供了从仿真(Isaac Sim)、训练到部署的全栈工具链,支持复杂的多传感器处理和多模态AI模型部署。
(未完待续)








评论前必须登录!
注册