 网硕互联帮助中心
网硕互联帮助中心
这是一个高度跨学科的前沿应用,融合了嵌入式系统、高效电机驱动、生物力学、康复医学、人机交互和传感器技术。其核心目标是为下肢功能障碍者(如中风患者、脊髓损伤患者、老年人)提供辅助行走、支撑体重、助力或阻力训练等功能。
一、 主要特点 (Key Features)
高效、高扭矩驱动系统 (High-Efficiency, High-Torque Drive System):
核心: 采用BLDC电机作为关节驱动器,通过减速器连接到髋关节、膝关节等部位。
功能:
高效率: 相比有刷电机,BLDC效率更高,有助于延长电池续航,对于需要长时间使用的助行设备至关重要。
高扭矩/功率密度: 能够提供足够的驱动力矩来支撑人体重量并辅助行走,同时保持相对紧凑的结构。
精确控制: 可实现精确的速度、位置和力矩控制,满足不同康复模式的需求(如被动训练、主动辅助、抗阻训练)。
长寿命: 无电刷磨损,提高了系统的可靠性和维护间隔。
多模态康复策略 (Multi-Modal Rehabilitation Strategy):
核心: 系统能够根据患者的康复阶段和医生处方,提供多种辅助模式。
功能:
被动模式 (Passive Mode): 机器人带动患者腿部完成步态周期,主要用于早期康复,帮助维持关节活动度,防止肌肉萎缩。
主动辅助模式 (Active-Assist Mode): 机器人感知患者的意图(通过肌电信号、力/力矩传感器、关节角度变化等),并在患者力量不足时给予适量辅助,鼓励患者主动参与。
抗阻训练模式 (Resistance Training Mode): 机器人提供与患者运动方向相反的阻力,用于增强肌肉力量和耐力。
支撑/站立模式 (Stand/Sit Support Mode): 在坐站转换或站立时提供部分体重支撑。
智能意图识别与人机交互 (Intelligent Intention Recognition & Human-Machine Interaction):
核心: 通过多种传感器(如肌电信号传感器EMG、足底压力传感器、关节编码器、IMU、力/力矩传感器)感知用户的运动意图和身体状态。
功能: 实时判断用户是想坐下、站立、迈步、转弯还是停止,并相应地调整机器人的控制策略,使辅助更加自然、舒适、安全。良好的人机交互界面(如显示屏、语音提示、按钮)也是关键。
步态分析与数据记录 (Gait Analysis & Data Logging):
核心: Arduino(或更强大的主控)记录和分析关节角度、速度、力矩、步长、步频、行走距离等数据。
功能: 为医生和治疗师提供客观的康复进展评估依据,帮助调整训练计划。数据也可用于算法优化和远程监控。
安全保护机制 (Safety Protection Mechanisms):
核心: 内置多种安全措施,防止意外发生。
功能:
力矩/电流限制: 防止输出过大力矩伤及用户。
紧急停止: 物理急停按钮或通过传感器检测异常情况(如摔倒迹象)触发急停。
跌倒检测与保护: 通过IMU、姿态传感器或足底压力传感器检测失衡,采取措施(如增加支撑、报警)。
关节限位: 防止关节运动超出安全范围。
碰撞检测: 感知外部碰撞并做出反应。
模块化与可调节设计 (Modular and Adjustable Design):
核心: 外骨骼结构应能适应不同身高、体型的用户。
功能: 关节连接件、连杆长度可调节,以确保穿戴舒适、贴合,力传递路径正确。
二、 应用场景 (Application Scenarios)
医疗机构康复科 (Rehabilitation Departments in Hospitals/Clinics):
用途: 作为重要的康复训练设备,用于中风、脊髓损伤、脑瘫等患者的步行功能重建训练。
价值: 提高康复效率,减轻治疗师体力负担,提供标准化、可量化、高强度的训练。
养老院与护理机构 (Nursing Homes & Care Facilities):
用途: 为行动不便的老年人提供日常助行支持,延缓肌肉萎缩,改善心肺功能,提升生活质量。
价值: 增强老人独立性,减少护理人员工作强度。
家庭康复 (Home-Based Rehabilitation – Emerging):
用途: 对于部分病情稳定、具备一定自主活动能力的患者,可在家庭环境中进行辅助训练或日常助行。
价值: 方便患者,降低康复成本,实现长期持续训练。
科研与临床试验 (Research & Clinical Trials):
用途: 作为研究平台,探索新的康复理论、评估不同康复策略的效果、开发更先进的控制算法。
价值: 推动康复医学发展。
三、 需要注意的事项 (Considerations & Critical Challenges)
安全至上的设计原则 (Safety-First Design Principle):
问题: 这是最重要的考量。任何系统故障、控制失误或机械问题都可能导致用户严重受伤甚至死亡。
对策:
严格遵循医疗器械相关的安全标准(如IEC 60601系列)进行设计和测试。
采用冗余传感器和安全回路。
进行全面的、严格的生物相容性、电气安全、机械安全、电磁兼容性(EMC)测试。
必须有经过培训的专业人员在场监督使用。
考虑申请医疗器械认证(如FDA、CE认证)。
Arduino平台的局限性 (Limitations of the Arduino Platform):
问题:
计算能力: 经典Arduino(如Uno)处理能力严重不足,难以运行复杂的意图识别算法、多传感器融合、高级控制理论(如自适应控制、模型预测控制MPC)或实时步态分析。
接口: I/O口数量可能不够,难以连接多个高精度传感器(如多轴力/力矩传感器、肌电传感器、编码器)。
实时性: Arduino的实时操作系统能力有限,难以保证严格的控制周期。
对策:
选用更强的主控: 更现实的选择是使用高性能单片机(如STM32H7系列)、嵌入式Linux平台(如树莓派、NVIDIA Jetson Nano/Orin Nano)或专门的机器人控制器。
分层控制: Arduino可以作为底层执行器或传感器接口,由更强大的上位机(如树莓派)进行高层决策和复杂计算。
生物力学与人体工程学适配 (Biomechanics & Ergonomics):
问题: 外骨骼必须与人体运动学、动力学特性高度匹配,穿戴舒适,力传递路径正确,否则易造成二次伤害或用户排斥。
对策: 需要深入研究人体步态生物力学,进行精密的机械设计和大量的人体测试。
意图识别的准确性与鲁棒性 (Accuracy and Robustness of Intention Recognition):
问题: 准确、实时地解读用户的运动意图极其困难,尤其是在病理状态下(如痉挛、肌力不对称)。传感器噪声、个体差异都会影响识别效果。
对策: 需要开发鲁棒的信号处理和模式识别算法,可能涉及机器学习技术,并进行大量临床数据训练和验证。
成本与普及性 (Cost and Accessibility):
问题: 高性能传感器、BLDC电机、减速器、控制系统、安全认证等使得研发和生产成本高昂,限制了普及。
对策: 在保证安全和基本功能的前提下,寻求降低成本的方案,但这往往与高性能和高可靠性相矛盾。
伦理与法律考量 (Ethical and Legal Considerations):
问题: 涉及人体使用的设备,伦理审查、用户隐私保护、责任归属等问题复杂。
对策: 必须遵守相关法律法规,进行伦理审查,明确使用规范和责任界定。
康复效果的科学验证 (Scientific Validation of Rehabilitation Efficacy):
问题: 必须通过严谨的临床试验来证明其相对于传统康复方法的优势。
对策: 与医疗机构合作开展临床研究。

1、基于肌电(EMG)的下肢助行外骨骼(入门级)
功能:通过表面肌电传感器采集腿部肌肉信号,识别用户的运动意图(如抬腿、迈步),控制BLDC电机驱动髋关节/膝关节转动,辅助行走。
硬件:Arduino UNO、BLDC电机(带霍尔传感器)、L298N驱动器、4个EMG传感器(大腿前侧/后侧各2个)、IMU(MPU6050,测姿态)。
代码逻辑:
EMG信号处理:滤波(去除工频干扰)、归一化(消除个体差异)、特征提取(均方根值RMS)。
意图识别:用阈值法判断用户是否要抬腿(如RMS超过阈值→抬腿意图)。
PID闭环控制:根据IMU的姿态数据调整电机角度,保持关节与腿部同步。
#include <Wire.h>
#include <Adafruit_MPU6050.h> // IMU库
#include <Acs712.h> // EMG传感器库(电流型,需转换为电压)
// 硬件引脚定义
#define HALL_A D2
#define HALL_B D3
#define MOTOR_EN A1
#define EMG_PIN A0
Acs712 emg(ACS712_20A, EMG_PIN); // 20A EMG传感器(检测肌肉电流)
Adafruit_MPU6050 mpu; // IMU(测大腿姿态)
// 全局变量
float targetAngle = 0; // 目标关节角度(度)
float currentAngle = 0; // 当前关节角度(霍尔计数转换)
int lastStepTime = 0; // 上一次抬腿时间
bool stepIntent = false; // 抬腿意图标志
void setup() {
Serial.begin(9600);
pinMode(HALL_A, INPUT);
pinMode(HALL_B, INPUT);
pinMode(MOTOR_EN, OUTPUT);
attachInterrupt(digitalPinToInterrupt(HALL_A), hallUpdate, CHANGE);
mpu.begin(); // 初始化IMU
}
void loop() {
// 1. 读取EMG信号(肌肉电流)
float emgVoltage = emg.getVoltage(); // 转换为电压(0-5V)
float emgRMS = calculateRMS(emgVoltage); // 计算均方根值(特征)
// 2. 意图识别(阈值法:RMS>0.8V→抬腿意图)
if (emgRMS > 0.8 && millis() – lastStepTime > 1000) { // 避免连续触发
stepIntent = true;
lastStepTime = millis();
} else {
stepIntent = false;
}
// 3. 姿态矫正(IMU获取大腿角度,调整目标角度)
sensors_event_t a, g, temp;
mpu.getEvent(&a, &g, &temp);
float thighAngle = atan2(a.acceleration.y, a.acceleration.z) * 180 / PI; // 大腿俯仰角
targetAngle = thighAngle + 15; // 目标角度=大腿角度+15°(辅助抬腿)
// 4. PID控制电机(保持关节角度跟踪)
float error = targetAngle – currentAngle;
static float integral = 0, lastError = 0;
float derivative = (error – lastError) / 0.1; // 采样周期0.1s
integral += error * 0.1;
// PID参数(经验调参)
float kp = 2.0, ki = 0.1, kd = 0.5;
float output = kp * error + ki * integral + kd * derivative;
output = constrain(output, –255, 255); // 限制输出范围
// 5. 控制电机转向与转速
if (stepIntent) {
digitalWrite(MOTOR_EN, HIGH);
analogWrite(MOTOR_EN, abs(output));
// 根据误差方向调整转向
if (output > 0) digitalWrite(HALL_A, HIGH); // 正转(抬腿)
else digitalWrite(HALL_A, LOW); // 反转(放下)
} else {
digitalWrite(MOTOR_EN, LOW); // 停止
}
lastError = error;
delay(100);
}
// 计算RMS(均方根值,EMG特征)
float calculateRMS(float voltage) {
static float sum = 0, count = 0;
sum += voltage * voltage;
count++;
if (count >= 10) { // 取10个样本的平均
float rms = sqrt(sum / count);
sum = 0; count = 0;
return rms;
}
return 0;
}
// 霍尔传感器中断:更新当前关节角度
void hallUpdate() {
currentAngle += 1; // 每脉冲增加1°(需校准霍尔分辨率)
}
2、基于压力中心的平衡辅助外骨骼(进阶级)
功能:通过足底压力传感器检测重心位置(COP),结合IMU的姿态数据,控制BLDC电机调整髋关节力矩,防止用户摔倒(如重心偏移时反向施力)。
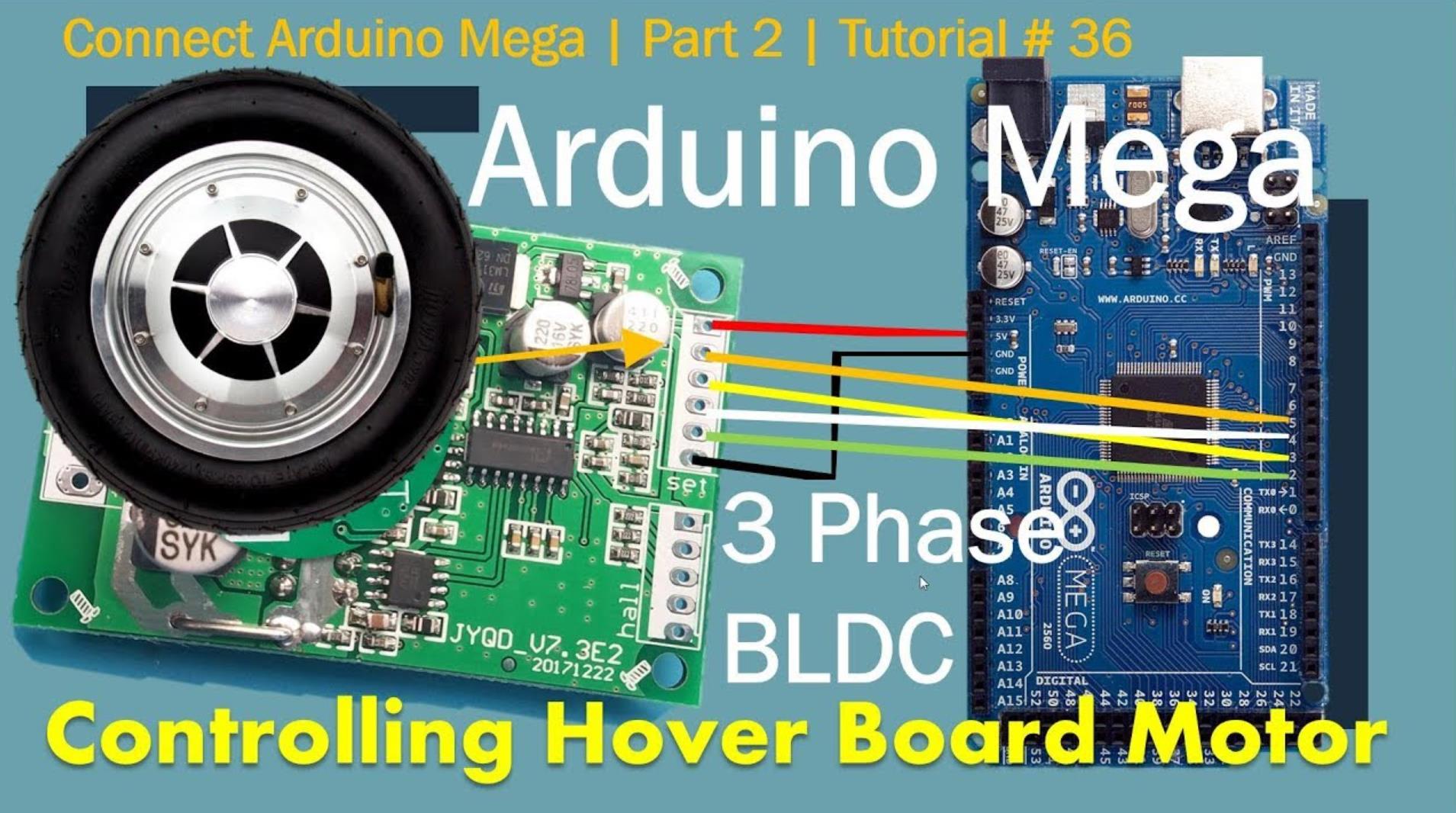
硬件:Arduino Mega、BLDC电机(带编码器)、TB6560驱动器、4个压力传感器(足底前掌/后跟各2个)、IMU(MPU9250)。
代码逻辑:
压力数据处理:计算重心坐标(x=(左前+右前)-(左后+右后),y=(前掌总和)-(后跟总和))。
平衡控制:用模糊逻辑调整电机力矩(如重心左偏→右髋关节增大力矩,拉回重心)。
力矩闭环:通过编码器的转速反馈,保持力矩稳定(避免过冲)。
#include <Fuzzy.h>
#include <Encoder.h>
#include <Adafruit_MPU9250.h>
// 硬件引脚定义
Encoder encoder(D2, D3); // 编码器(测电机转速)
#define PRESSURE_LEFT_FRONT A0
#define PRESSURE_LEFT_REAR A1
#define PRESSURE_RIGHT_FRONT A2
#define PRESSURE_RIGHT_REAR A3
#define MOTOR_DIR D9
#define MOTOR_PWM D10
Adafruit_MPU9250 mpu; // IMU(测躯干姿态)
// 全局变量
float copX = 0, copY = 0; // 重心坐标
float torqueTarget = 0; // 目标力矩(N·m)
float currentTorque = 0; // 当前力矩(编码器转速转换)
// 模糊控制器初始化
Fuzzy* fuzzyTorque;
void setup() {
Serial.begin(9600);
pinMode(PRESSURE_LEFT_FRONT, INPUT);
pinMode(PRESSURE_LEFT_REAR, INPUT);
pinMode(PRESSURE_RIGHT_FRONT, INPUT);
pinMode(PRESSURE_RIGHT_REAR, INPUT);
pinMode(MOTOR_DIR, OUTPUT);
pinMode(MOTOR_PWM, OUTPUT);
fuzzyTorque = new Fuzzy(2, 1); // 输入:copX偏差、copY偏差;输出:力矩
defineTorqueFuzzySets();
defineTorqueRules();
}
void loop() {
// 1. 读取压力传感器数据(模拟量,0-1023对应0-50kg)
int leftFront = analogRead(PRESSURE_LEFT_FRONT);
int leftRear = analogRead(PRESSURE_LEFT_REAR);
int rightFront = analogRead(PRESSURE_RIGHT_FRONT);
int rightRear = analogRead(PRESSURE_RIGHT_REAR);
// 2. 计算重心坐标(归一化到-1~1)
copX = map((leftFront + rightFront) – (leftRear + rightRear), –2046, 2046, –1, 1);
copY = map((leftFront + rightFront + leftRear + rightRear) / 2, 0, 1023, –1, 1);
// 3. 模糊推理:获取目标力矩(-5~5 N·m)
fuzzyTorque->setInput(0, copX);
fuzzyTorque->setInput(1, copY);
fuzzyTorque->fuzzify();
torqueTarget = fuzzyTorque->getOutput(0);
// 4. 力矩闭环控制(编码器转速→力矩)
long currentSpeed = encoder.read(); // 编码器脉冲数(转速)
encoder.write(0); // 清零
currentTorque = currentSpeed * 0.1; // 转换系数(假设1脉冲=0.1N·m)
// 5. PID调整PWM(跟踪目标力矩)
float error = torqueTarget – currentTorque;
static float integral = 0, lastError = 0;
float derivative = (error – lastError) / 0.1;
integral += error * 0.1;
float kp = 1.5, ki = 0.05, kd = 0.2;
float pwmValue = kp * error + ki * integral + kd * derivative;
pwmValue = constrain(pwmValue, 0, 255);
// 6. 控制电机转向(力矩方向)
if (torqueTarget > 0) digitalWrite(MOTOR_DIR, HIGH); // 正转(纠正重心)
else digitalWrite(MOTOR_DIR, LOW); // 反转
analogWrite(MOTOR_PWM, pwmValue);
lastError = error;
delay(10); // 高频采样(力矩控制需快速响应)
}
// 定义力矩的模糊集(输入copX/Y:-1~1;输出力矩:-5~5)
void defineTorqueFuzzySets() {
fuzzyTorque->addInputSet(new Triangular("Left", –1, –0.5, 0)); // 重心左偏
fuzzyTorque->addInputSet(new Triangular("Center", –0.5, 0, 0.5));// 重心中
fuzzyTorque->addInputSet(new Triangular("Right", 0, 0.5, 1)); // 重心右偏
fuzzyTorque->addOutputSet(new Triangular("Negative", –5, –2.5, 0));// 负力矩(左偏时右拉)
fuzzyTorque->addOutputSet(new Triangular("Zero", –1, 0, 1)); // 零力矩(平衡)
fuzzyTorque->addOutputSet(new Triangular("Positive", 0, 2.5, 5)); // 正力矩(右偏时左拉)
}
// 定义力矩的模糊规则
void defineTorqueRules() {
fuzzyTorque->addRule(new FuzzyRule("Left", "Center", "Negative")); // 左偏→负力矩
fuzzyTorque->addRule(new FuzzyRule("Right", "Center", "Positive"));// 右偏→正力矩
fuzzyTorque->addRule(new FuzzyRule("Center", "Center", "Zero")); // 中→零力矩
}
3、基于多模态融合的智能助行外骨骼(高级级)
功能:整合EMG(意图)、压力(重心)、IMU(姿态)三类传感器数据,用卡尔曼滤波融合信息,实现更精准的意图识别与自适应助力(如上下坡时自动调整力矩)。
硬件:Arduino Mega、BLDC电机(带绝对值编码器)、伺服驱动器、多模态传感器模块(集成EMG+压力+IMU)、Wi-Fi模块(ESP8266,上传数据到云端)。
代码逻辑:
多源数据采集:同时读取EMG、压力、IMU数据。
数据融合:用卡尔曼滤波估计用户的运动状态(如步行、上楼、下楼)。
自适应控制:根据运动状态调整BLDC电机的助力模式(如上楼时增大髋关节力矩,下楼时减小力矩并制动)。
#include <KalmanFilter.h>
#include <ESP8266WiFi.h> // Wi-Fi库(上传数据到云端)
// 硬件定义(简化)
#define EMG_PIN A0
#define PRESSURE_PIN A1
#define IMU_PIN A2
KalmanFilter kf; // 卡尔曼滤波对象(融合3类数据)
WiFiClient wifiClient; // Wi-Fi客户端
// 全局变量
float emgSignal = 0, pressureSignal = 0, imuSignal = 0;
float fusedState = 0; // 融合后的运动状态(0=静止,1=步行,2=上楼,3=下楼)
float motorTorque = 0; // 最终输出力矩
void setup() {
Serial.begin(9600);
WiFi.begin("SSID", "PASSWORD"); // 连接Wi-Fi
while (WiFi.status() != WL_CONNECTED) delay(1000);
kf.init(3, 2); // 状态维度(运动状态),观测维度(3类传感器)
kf.processNoiseCov << 0.1, 0, 0, 0, 0.1, 0, 0, 0, 0.1; // 过程噪声
kf.measurementNoiseCov << 0.01, 0, 0, 0, 0.01, 0, 0, 0, 0.01; // 观测噪声
}
void loop() {
// 1. 采集多源数据
emgSignal = analogRead(EMG_PIN) / 1023.0; // 归一化(0-1)
pressureSignal = analogRead(PRESSURE_PIN) / 1023.0;
imuSignal = analogRead(IMU_PIN) / 1023.0;
// 2. 卡尔曼滤波融合
kf.predict(); // 预测下一状态
kf.update << emgSignal, pressureSignal, imuSignal; // 更新观测值
fusedState = kf.statePost[0]; // 获取融合后的运动状态
// 3. 自适应助力模式切换
switch ((int)fusedState) {
case 0: // 静止→零力矩
motorTorque = 0;
break;
case 1: // 步行→中等力矩(维持平衡)
motorTorque = 3;
break;
case 2: // 上楼→大力矩(辅助抬腿)
motorTorque = 5;
break;
case 3: // 下楼→小力矩+制动(防止下坠)
motorTorque = –1; // 负力矩表示制动
break;
default:
motorTorque = 0;
}
// 4. 控制电机(同案例2的力矩闭环)
controlMotorTorque(motorTorque);
// 5. 上传数据到云端(远程监控)
String data = "EMG:" + String(emgSignal) + ",Pressure:" + String(pressureSignal) + ",State:" + String(fusedState);
wifiClient.println("GET /data?");
wifiClient.println(data);
wifiClient.stop();
delay(100);
}
// 控制电机力矩的函数(同案例2)
void controlMotorTorque(float torque) {
// … 复制案例2的力矩闭环代码 …
}
要点解读
医疗外骨骼直接接触患者,安全是第一优先级。需设计多层防护:
硬件保护:电机驱动器内置过流/过压保护(如TB6560的OC关断);电池采用磷酸铁锂(安全稳定,避免爆炸);
软件限制:设置力矩上限(如案例2中±5N·m)、速度上限(如案例1中100rpm),防止电机失控;
急停按钮:物理按键强制切断电机电源(代码中可添加if (digitalRead(EMERGENCY_BTN) == LOW) stopMotors();)。
案例对应:所有案例均设置了constrain()函数限制输出范围,案例3还加入了Wi-Fi远程监控,便于医护人员及时干预。
意图识别的准确性直接影响助行效果,需选择高信噪比的传感器并优化算法:
EMG传感器:需贴附在肌肉丰厚处(如股四头肌、腘绳肌),并用差分放大电路去除共模干扰;
压力传感器:分布在足底受力关键点(前掌、后跟、内侧、外侧),提高重心计算精度;
算法选择:入门级用阈值法(简单可靠),进阶级用支持向量机(SVM)或随机森林(识别更多运动模式)。
案例对应:案例1用阈值法识别抬腿意图,案例3用卡尔曼滤波融合多源数据,提升识别准确率。
外骨骼需与人体运动同步,既不能“滞后”(导致摔倒),也不能“超前”(阻碍自主运动)。常用阻抗控制或导纳控制:
阻抗控制:调整电机的“刚度”(如用户用力大时,电机变“软”,减少对抗);
导纳控制:将电机力转换为速度(如用户想快速抬腿时,电机提高转速)。
案例对应:案例1用PID跟踪关节角度,案例2用模糊逻辑调整力矩,本质都是为了让电机“跟随”人体运动。
医疗外骨骼需佩戴在身上,重量和续航是关键指标:
电机选择:优先选无刷外转子电机(功率密度高、扭矩大、体积小),如Maxon EC-i40;
电池选择:用高能量密度锂电池(如18650,容量3000mAh以上),保证至少2小时续航;
节能设计:空闲时进入低功耗模式(如案例1中stepIntent=false时停止电机),减少电量消耗。
案例对应:所有案例均采用小型BLDC电机,案例3加入Wi-Fi远程监控,避免频繁更换电池。
不同患者的身高、体重、运动能力差异大,需设计模块化结构,方便调整:
机械结构:采用铝合金或碳纤维材质,关节长度可调节(如髋关节杆伸缩);
软件参数:存储多组用户配置(如EMG阈值、PID参数),通过蓝牙/Wi-Fi一键切换;
校准功能:开机时自动校准传感器(如IMU的零偏、压力传感器的初始值),消除个体差异。
案例对应:案例1中的EMG阈值可根据用户需求调整(代码中0.8V可改为其他值),案例3的卡尔曼滤波参数可通过云端远程校准。
4、膝关节助力控制(基于IMU的步态相位检测)
#include <MPU6050.h>
#include <Encoder.h>
#include <SimpleFOC.h>
// 硬件配置
MPU6050 imu;
Encoder kneeEncoder(2, 3); // 编码器接口
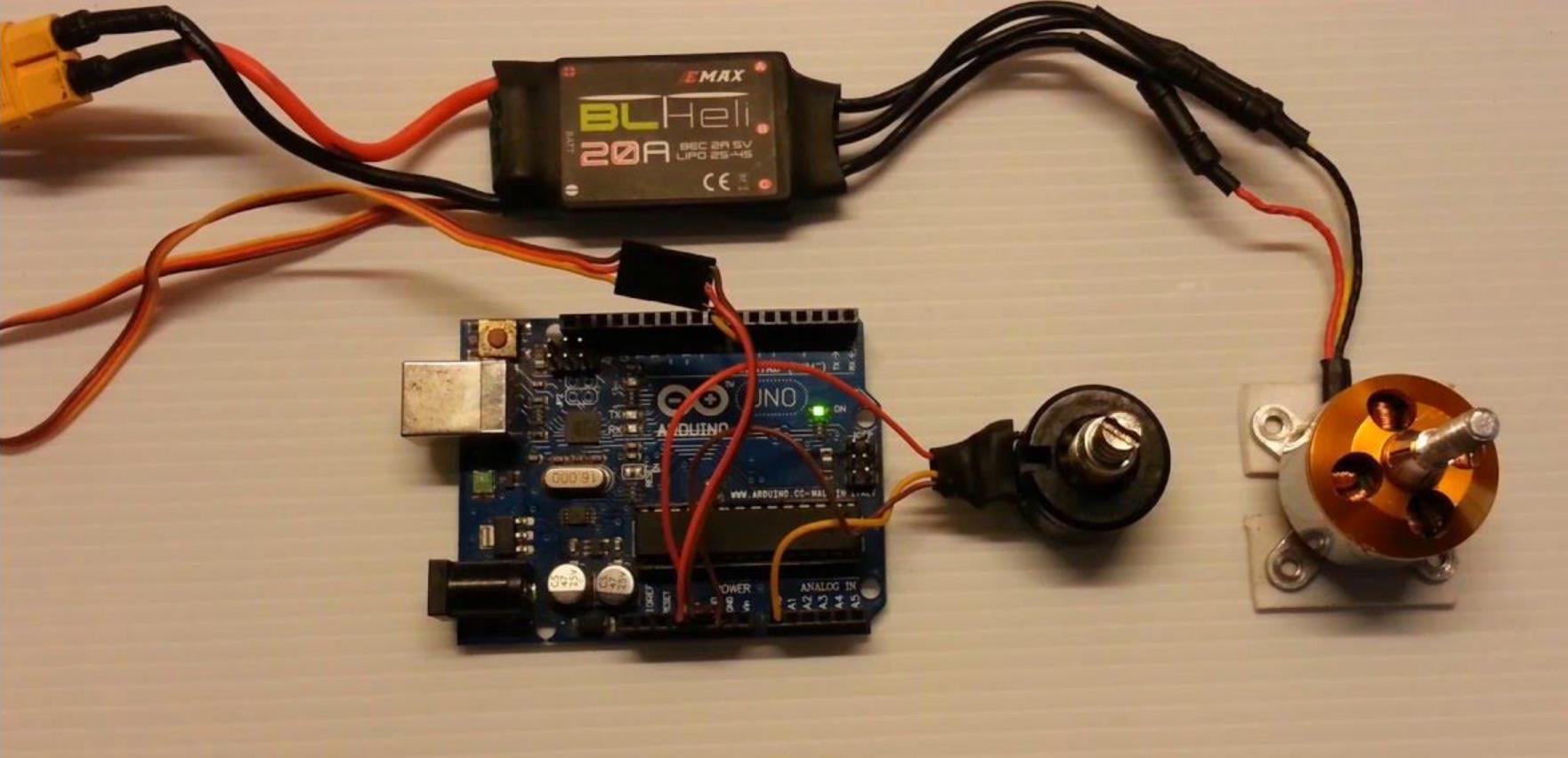
BLDCMotor motor(9); // BLDC电机PWM引脚
BLDCDriver3PWM driver(5, 6, 7); // 三相驱动引脚
// 步态参数
float gaitPhase = 0;
const float stanceThreshold = 0.3; // 站立相阈值
const float swingThreshold = 0.7; // 摆动相阈值
void setup() {
Serial.begin(115200);
imu.initialize();
motor.linkDriver(&driver);
motor.controller = MotionControlType::torque; // 力矩模式
motor.voltage_sensor_align = 3; // 电机对齐
motor.init();
}
void loop() {
// 1. 获取IMU数据(简化版)
int16_t ax, ay, az;
imu.getAcceleration(&ax, &ay, &az);
float kneeAngle = kneeEncoder.read() * 0.01; // 编码器角度转换
// 2. 步态相位检测(简化逻辑)
if (az > 0.8) gaitPhase = 0.1; // 站立相开始
else if (az < –0.8) gaitPhase = 0.6; // 摆动相开始
// 3. 助力控制策略
float torqueCommand = 0;
if (gaitPhase < stanceThreshold) {
torqueCommand = 0.5; // 站立相提供50%助力
} else if (gaitPhase > swingThreshold) {
torqueCommand = –0.3; // 摆动相轻微制动
}
motor.move(torqueCommand);
// 4. 安全监控
if (motor.current_sense.current() > 5.0) { // 过流保护
motor.stop();
Serial.println("Overcurrent detected!");
}
delay(10);
}
5、髋关节多模式切换(位置/力矩混合控制)
#include <Servo.h>
#include <Encoder.h>
Servo hipMotor;
Encoder hipEncoder(2, 3);
const int modePin = 4; // 模式切换按钮
void setup() {
hipMotor.attach(9);
pinMode(modePin, INPUT_PULLUP);
Serial.begin(9600);
}
void loop() {
static bool isTorqueMode = false;
long currentPos = hipEncoder.read();
// 模式切换检测
if (digitalRead(modePin) == LOW) {
isTorqueMode = !isTorqueMode;
delay(300); // 防抖
}
// 控制策略
if (isTorqueMode) {
// 力矩模式:根据角度偏差提供助力
float error = 90 – currentPos * 0.1; // 目标角度90°
float torque = map(error, –90, 90, –50, 50); // 线性映射
hipMotor.writeMicroseconds(1500 + torque); // 中立位1500μs
} else {
// 位置模式:直接控制角度
int targetAngle = 90;
hipMotor.write(targetAngle * 0.56); // 0-180°映射到0-100μs
}
Serial.print("Mode: ");
Serial.print(isTorqueMode ? "Torque" : "Position");
Serial.print(" Angle: ");
Serial.println(currentPos * 0.1);
delay(50);
}
6、多关节协同控制(基于CAN总线通信)
#include <mcp_can.h>
#include <Encoder.h>
MCP_CAN can(10); // CAN总线接口
Encoder kneeEnc(2, 3);
Encoder hipEnc(4, 5);
struct JointCommand {
float targetAngle;
float maxTorque;
};
void setup() {
Serial.begin(115200);
while (CAN_OK != can.begin(CAN_500KBPS)) { // 初始化CAN总线
Serial.println("CAN init failed");
delay(100);
}
Serial.println("CAN init OK");
}
void loop() {
// 1. 读取编码器数据
float kneeAngle = kneeEnc.read() * 0.01;
float hipAngle = hipEnc.read() * 0.01;
// 2. 发送关节状态(简化版)
unsigned char canMsg[8] = {0};
float* ptr = (float*)canMsg;
ptr[0] = kneeAngle;
ptr[1] = hipAngle;
can.sendMsgBuf(0x100, 0, 8, canMsg); // 发送到ID 0x100
// 3. 接收控制指令
unsigned char len = 0;
unsigned char buf[8];
if (CAN_MSGAVAIL == can.checkReceive()) {
can.readMsgBuf(&len, buf);
if (buf[0] == 0x01) { // 膝关节指令
JointCommand cmd;
memcpy(&cmd, buf + 1, sizeof(cmd));
// 执行膝关节控制(此处省略具体实现)
}
}
delay(20);
}
要点解读
传感器融合与步态识别
医疗外骨骼需通过IMU、压力传感器等多模态数据融合识别步态相位(如站立相/摆动相)。
示例代码4中通过加速度计阈值简化步态检测,实际需结合陀螺仪积分与机器学习算法提高准确性。
控制模式切换
需支持位置控制(精确轨迹跟踪)与力矩控制(柔顺交互)的动态切换(如案例5)。
医疗场景中,力矩模式用于辅助患者主动运动,位置模式用于被动康复训练。
实时性与安全性
控制周期需≤10ms(如案例4的10ms延迟)以满足人体运动响应需求。
必须实现过流保护(如案例4的current_sense检测)、急停按钮、机械限位等安全机制。
多关节协同与通信
分布式架构(如案例6的CAN总线)可降低主控负担,支持模块化扩展。
需同步各关节运动以避免机械冲突(如案例6中通过时间戳或共享时钟实现同步)。
电源管理与热设计
BLDC电机启停瞬态电流可达10A以上,需使用高倍率锂电池(如4S LiPo)或稳压电源。
电机外壳需集成温度传感器(如DS18B20),动态降额运行防止过热(参考案例中的温升管理)。
注意,以上案例只是为了拓展思路,仅供参考。它们可能有错误、不适用或者无法编译。您的硬件平台、使用场景和Arduino版本可能影响使用方法的选择。实际编程时,您要根据自己的硬件配置、使用场景和具体需求进行调整,并多次实际测试。您还要正确连接硬件,了解所用传感器和设备的规范和特性。涉及硬件操作的代码,您要在使用前确认引脚和电平等参数的正确性和安全性。




评论前必须登录!
注册