 网硕互联帮助中心
网硕互联帮助中心文章目录
- 前言
- 键盘遥控器软件
-
-
- 一、基础移动(普通模式)
- 二、全向移动(按住Shift键切换模式)
- 三、Z轴(上下)控制
- 四、速度调节
- 五、退出
-
前言
上回说到,我们做了一个可以“爱的魔力转圈圈”的小车,不过这个好解决,一看就是线接反了导致的。
改改线就好了。
我们在这个基础上,继续往后做就行。
实在搞不出来的,找我要现成的场景文件,应该也是可以的。
键盘遥控器软件
sudo apt-get install ros-$ROS_DISTRO-teleop-twist-keyboard
开始控制
ros2 run teleop_twist_keyboard teleop_twist_keyboard
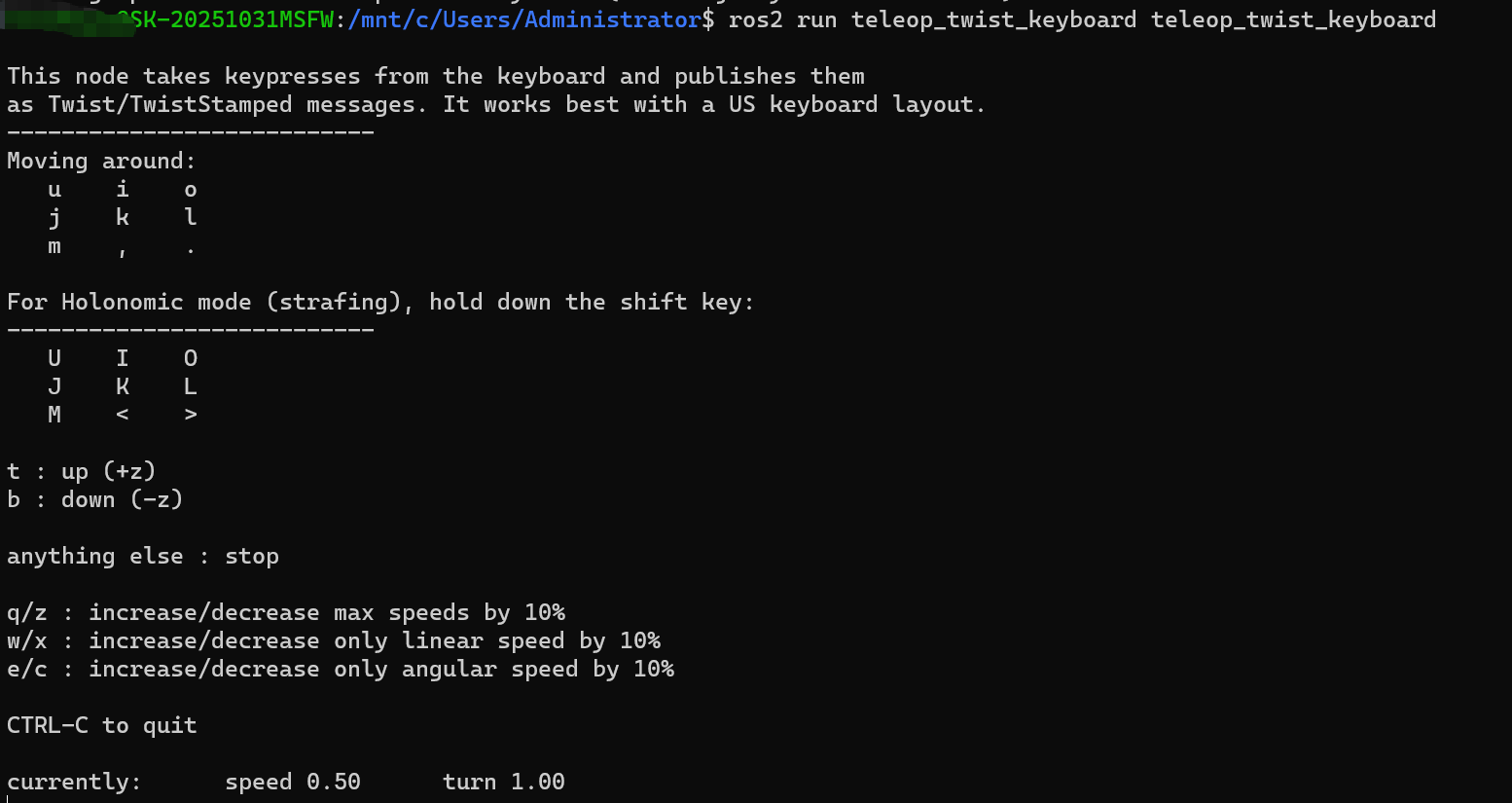
有个说明书,问问豆包,这玩意儿咋用。
这是ROS2里的teleop_twist_keyboard节点(用来通过键盘控制机器人运动),用法很简单,我给你拆解下:
一、基础移动(普通模式)
按键盘上的这些键控制机器人前后左右/转向:
u i o
j k l
m , .
- i:前进;,



评论前必须登录!
注册