 网硕互联帮助中心
网硕互联帮助中心第1章-质点动力学(中)
1.5 牛顿运动定律
力不像质量那样是一个原始概念,因为它与运动和惯性的概念密切相关。事实上,改变物体运动的唯一方法是对其施加力。运动改变的程度是力的量度。牛顿第二运动定律量化了这一点。如果质量为 mmm 的物体上的合力或净力是 Fnet\\mathbf{F}_{\\text{net}}Fnet,则
Fnet=ma(1.38)
\\mathbf {F} _ {\\text {net}} = m \\mathbf {a} \\tag {1.38}
Fnet=ma(1.38)
在这个方程中,a\\mathbf{a}a 是质心的绝对加速度。绝对加速度是在相对于恒星没有平移或旋转加速度的参考系中测量的。这样的参考系称为绝对或惯性参考系。
那么,力通过牛顿第二定律与质量、长度和时间的原始概念相关联。力的单位适当地是牛顿,即赋予 1 kg 质量以 1m/s21 \\mathrm{m/s^2}1m/s2 加速度所需的力。因此,一千克的质量在地球表面重 9.81 牛顿。千克不是力的单位。
当质量用力单位表示时,可能会产生混淆,这在美国工程实践中经常发生。在通俗说法中,磅或吨(2000 磅)更可能用于表示质量。磅质量根据千克精确定义,如表 A.3 所示。由于一磅质量在存在标准海平面重力加速度 (g0=9.80665m/s2)(g_0 = 9.80665 \\mathrm{m/s^2})(g0=9.80665m/s2) 的地方重一磅力,我们可以使用牛顿第二定律将磅力与牛顿联系起来:
1lb(力)=0.4536kg×9.807m/s2=4.448N
1 \\mathrm {l b} (\\text {力}) = 0. 4 5 3 6 \\mathrm {k g} \\times 9. 8 0 7 \\mathrm {m} / \\mathrm {s} ^ {2} = 4. 4 4 8 \\mathrm {N}
1lb(力)=0.4536kg×9.807m/s2=4.448N
斯勒格 (slug) 是在一磅力的作用下以 1ft/s21 \\mathrm{ft/s^2}1ft/s2 加速的物质的量。我们可以再次使用牛顿第二定律将斯勒格与千克联系起来。注意表 A.3 中英尺和米之间的关系,我们发现
1slug=1lb1ft/s2=4.448N0.3048m/s2=14.59kg⋅m/s2m/s2=14.59kg
1 \\mathrm {s l u g} = \\frac {1 \\mathrm {l b}}{1 \\mathrm {f t} / \\mathrm {s} ^ {2}} = \\frac {4 . 4 4 8 \\mathrm {N}}{0 . 3 0 4 8 \\mathrm {m} / \\mathrm {s} ^ {2}} = 1 4. 5 9 \\frac {\\mathrm {k g} \\cdot \\mathrm {m} / \\mathrm {s} ^ {2}}{\\mathrm {m} / \\mathrm {s} ^ {2}} = 1 4. 5 9 \\mathrm {k g}
1slug=1ft/s21lb=0.3048m/s24.448N=14.59m/s2kg⋅m/s2=14.59kg
例题 1.9
在一次 NASA 任务中,亚特兰蒂斯号航天飞机在升空前报告重 239,255 lb。在第 18 圈轨道上,高度约为 350km350 \\mathrm{km}350km,轨道器的重量报告为 236,900 lb。(a) 亚特兰蒂斯号在发射台和轨道上的质量(以千克为单位)是多少?(b) 如果在发射和第 18 圈轨道之间没有质量损失,亚特兰蒂斯号的重量(以磅为单位)将是多少?
解
(a) 给定的数据说明了通常使用磅作为质量的度量。给出的“重量”实际上是以磅质量为单位的质量。因此,在发射前
m发射台=239,255lb(质量)×0.4536kg1lb(质量)=108,500kg
m _ {\\text {发射台}} = 2 3 9, 2 5 5 \\mathrm {l b} (\\text {质量}) \\times \\frac {0 . 4 5 3 6 \\mathrm {k g}}{1 \\mathrm {l b} (\\text {质量})} = \\boxed {1 0 8, 5 0 0 \\mathrm {k g}}
m发射台=239,255lb(质量)×1lb(质量)0.4536kg=108,500kg
在轨道上,
m轨道 18=236,900lb(质量)×0.4536kg1lb(质量)=107,500kg
m _ {\\text {轨道 18}} = 2 3 6, 9 0 0 \\mathrm {l b} (\\text {质量}) \\times \\frac {0 . 4 5 3 6 \\mathrm {k g}}{1 \\mathrm {l b} (\\text {质量})} = \\boxed {1 0 7, 5 0 0 \\mathrm {k g}}
m轨道 18=236,900lb(质量)×1lb(质量)0.4536kg=107,500kg
质量的减少是轨道器上的轨道机动和反作用控制火箭消耗的推进剂。
(b) 由于肯尼迪航天中心的航天飞机发射台基本上处于海平面,亚特兰蒂斯号在发射台上的重量(力)在数值上等于其质量(磅质量)。如果没有质量变化,根据方程 1.36,在 350km350 \\mathrm{km}350km 处的重力将是
W=239,255lb(力)×(11+3506378)2=215,000lb(力)
W = 2 3 9, 2 5 5 \\mathrm {l b} (\\text {力}) \\times \\left(\\frac {1}{1 + \\frac {3 5 0}{6 3 7 8}}\\right) ^ {2} = \\boxed {2 1 5, 0 0 0 \\mathrm {l b} (\\text {力})}
W=239,255lb(力)×(1+63783501)2=215,000lb(力)
力 F\\mathbf{F}F 在时间间隔内的积分称为力的冲量,
J=∫t1t2Fdt(1.39)
\\mathcal {J} = \\int_ {t _ {1}} ^ {t _ {2}} \\mathbf {F} d t \\tag {1.39}
J=∫t1t2Fdt(1.39)
冲量是一个矢量。从方程 1.38 可以明显看出,如果质量是恒定的,那么
Pnet=∫t1t2mdvdtdt=mv2−mv1(1.40)
\\mathcal {P} _ {\\text {net}} = \\int_ {t _ {1}} ^ {t _ {2}} m \\frac {d \\mathbf {v}}{d t} d t = m \\mathbf {v} _ {2} – m \\mathbf {v} _ {1} \\tag {1.40}
Pnet=∫t1t2mdtdvdt=mv2−mv1(1.40)
即,物体上的净冲量产生其线动量的变化 mΔvm\\Delta\\mathbf{v}mΔv,使得
Δv=Pnetm(1.41)
\\Delta \\mathbf {v} = \\frac {\\mathcal {P} _ {\\text {net}}}{m} \\tag {1.41}
Δv=mPnet(1.41)
如果 Fnet\\mathbf{F}_{\\text{net}}Fnet 是恒定的,那么 Pnet=FnetΔt\\boldsymbol{\\mathcal{P}}_{\\text{net}} = \\mathbf{F}_{\\text{net}} \\Delta tPnet=FnetΔt,在这种情况下方程 1.41 变为
Δv=FnetmΔt(如果 Fnet 是常数)(1.42)
\\Delta \\mathbf {v} = \\frac {\\mathbf {F} _ {\\text {net}}}{m} \\Delta t \\quad \\text {(如果 } \\mathbf {F} _ {\\text {net}} \\text { 是常数)} \\tag {1.42}
Δv=mFnetΔt(如果 Fnet 是常数)(1.42)
让我们通过引入角动量的概念来结束本节。图 1.13 中净力关于 ooo 的力矩是
MOnet=r×Fnet
\\mathbf {M} _ {O \\text {net}} = \\mathbf {r} \\times \\mathbf {F} _ {\\text {net}}
MOnet=r×Fnet
代入方程 1.38 得出
MOnet=r×ma=r×mdvdt(1.43)
\\mathbf {M} _ {O \\text {net}} = \\mathbf {r} \\times m \\mathbf {a} = \\mathbf {r} \\times m \\frac {d \\mathbf {v}}{d t} \\tag {1.43}
MOnet=r×ma=r×mdtdv(1.43)
但是,记住质量是恒定的,
r×mdvdt=ddt(r×mv)−(drdt×mv)=ddt(r×mv)−(v×mv)
\\mathbf {r} \\times m \\frac {d \\mathbf {v}}{d t} = \\frac {d}{d t} (\\mathbf {r} \\times m \\mathbf {v}) – \\left(\\frac {d \\mathbf {r}}{d t} \\times m \\mathbf {v}\\right) = \\frac {d}{d t} (\\mathbf {r} \\times m \\mathbf {v}) – (\\mathbf {v} \\times m \\mathbf {v})
r×mdtdv=dtd(r×mv)−(dtdr×mv)=dtd(r×mv)−(v×mv)
由于 v×mv=m(v×v)=0\\mathbf{v} \\times m\\mathbf{v} = m(\\mathbf{v} \\times \\mathbf{v}) = \\mathbf{0}v×mv=m(v×v)=0,因此方程 1.43 可以写成
MOnet=dHOdt(1.44)
\\mathbf {M} _ {O \\text {net}} = \\frac {d \\mathbf {H} _ {O}}{d t} \\tag {1.44}
MOnet=dtdHO(1.44)
其中 HO\\mathbf{H}_OHO 是关于 ooo 的角动量,
HO=r×mv(1.45)
\\mathbf {H} _ {O} = \\mathbf {r} \\times m \\mathbf {v} \\tag {1.45}
HO=r×mv(1.45)
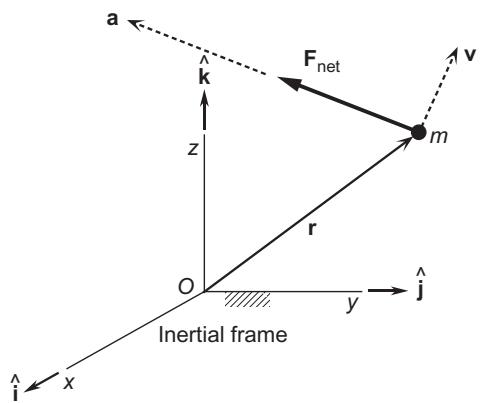
图 1.13 质点的绝对加速度在合力的方向上。
因此,就像质点上的净力改变其线动量 mvm\\mathbf{v}mv 一样,该力关于固定点的力矩改变其关于该点的线动量矩。对方程 1.44 对时间积分得出
∫t1t2MO netdt=HO2−HO1(1.46)
\\int_ {t _ {1}} ^ {t _ {2}} \\mathbf {M} _ {\\text {O net}} d t = \\mathbf {H} _ {O 2} – \\mathbf {H} _ {O 1} \\tag {1.46}
∫t1t2MO netdt=HO2−HO1(1.46)
左边的积分是净角冲量。这个角冲量-动量方程是方程 1.40 中给出的线性冲量-动量关系的旋转类比。
例题 1.10
质量为 mmm 的质点通过长度为 lll 的不可伸长的绳子连接到点 ooo(图 1.14)。最初当 mmm 以速度 v0v_0v0 向左移动到所示位置时,绳子是松弛的。计算 (a) 绳子拉紧后 mmm 的速度,以及 (b) 在改变质点运动方向所需的微小时间间隔 Δt\\Delta tΔt 内绳子中的平均力。
解
(a) 最初,质点的位置和速度是
r1=ci^+dj^v1=−voi^
\\mathbf {r} _ {1} = c \\hat {\\mathbf {i}} + d \\hat {\\mathbf {j}} \\quad \\mathbf {v} _ {1} = – v _ {o} \\hat {\\mathbf {i}}
r1=ci^+dj^v1=−voi^
关于 ooo 的角动量是
H1=r1×mv1=∣i^j^k^cd0−mvo00∣=mvodk^(a)
\\mathbf {H} _ {1} = \\mathbf {r} _ {1} \\times m \\mathbf {v} _ {1} = \\left| \\begin{array}{c c c} \\hat {\\mathbf {i}} & \\hat {\\mathbf {j}} & \\hat {\\mathbf {k}} \\\\ c & d & 0 \\\\ – m v _ {o} & 0 & 0 \\end{array} \\right| = m v _ {o} d \\hat {\\mathbf {k}} \\tag {a}
H1=r1×mv1=i^c−mvoj^d0k^00=mvodk^(a)
绳子拉紧后
r2=−l2−d2i^+dj^v2=vxi^+vyj^(b)
\\mathbf {r} _ {2} = – \\sqrt {l ^ {2} – d ^ {2}} \\hat {\\mathbf {i}} + d \\hat {\\mathbf {j}} \\quad \\mathbf {v} _ {2} = v _ {x} \\hat {\\mathbf {i}} + v _ {y} \\hat {\\mathbf {j}} \\tag {b}
r2=−l2−d2i^+dj^v2=vxi^+vyj^(b)
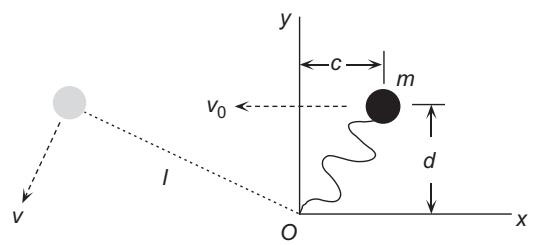
图 1.14 通过不可伸长的绳子连接到 $o$ 的质点。
角动量是
H2=r2×mv2=∣i^j^k^−l2−d2d0vxvy0∣=(−mvxd−mvyl2−d2)k^(c)
\\mathbf {H} _ {2} = \\mathbf {r} _ {2} \\times m \\mathbf {v} _ {2} = \\left| \\begin{array}{c c c} \\hat {\\mathbf {i}} & \\hat {\\mathbf {j}} & \\hat {\\mathbf {k}} \\\\ – \\sqrt {l ^ {2} – d ^ {2}} & d & 0 \\\\ v _ {x} & v _ {y} & 0 \\end{array} \\right| = (- m v _ {x} d – m v _ {y} \\sqrt {l ^ {2} – d ^ {2}}) \\hat {\\mathbf {k}} \\tag {c}
H2=r2×mv2=i^−l2−d2vxj^dvyk^00=(−mvxd−mvyl2−d2)k^(c)
最初松弛的绳子对 mmm 施加的力为零。当绳子拉紧时,施加在 mmm 上的力通过 ooo。因此,净力对 mmm 关于 ooo 的力矩保持为零。根据方程 1.46,
H2=H1
\\mathbf {H} _ {2} = \\mathbf {H} _ {1}
H2=H1
代入 (a) 和 ©,得出
vxd+l2−d2vy=−vod(d)
v _ {x} d + \\sqrt {l ^ {2} – d ^ {2}} v _ {y} = – v _ {o} d \\tag {d}
vxd+l2−d2vy=−vod(d)
绳子是不可伸长的,所以 mmm 沿绳子的速度分量必须为零:
v2⋅r2=0
\\mathbf {v} _ {2} \\cdot \\mathbf {r} _ {2} = 0
v2⋅r2=0
代入 (b) 中的 v2\\mathbf{v}_2v2 和 r2\\mathbf{r}_2r2 并解出 vyv_yvy,我们得到
vy=vxl2d2−1(e)
v _ {y} = v _ {x} \\sqrt {\\frac {l ^ {2}}{d ^ {2}} – 1} \\tag {e}
vy=vxd2l2−1(e)
解 (d) 和 (e) 求 vxv_xvx 和 vyv_yvy 导致
vx=−d2l2vovy=−1−d2l2dlvo(f)
v _ {x} = – \\frac {d ^ {2}}{l ^ {2}} v _ {o} \\quad v _ {y} = – \\sqrt {1 – \\frac {d ^ {2}}{l ^ {2}}} \\frac {d}{l} v _ {o} \\tag {f}
vx=−l2d2vovy=−1−l2d2ldvo(f)
因此,绳子拉紧后的速度 v=vx2+vy2v = \\sqrt{v_x^2 + v_y^2}v=vx2+vy2 是
v=dlvo
\\boxed {v = \\frac {d}{l} v _ {o}}
v=ldvo
(b) 从方程 1.40,在绳子拉紧所需的时间内对 mmm 的冲量是
P=m(v2−v1)=m[(−d2l2voi^−1−d2l2dlvoj^)−(−voi^)]=(1−d2l2)mvoi^−1−d2l2dlmvoj^
\\mathcal {P} = m \\left(\\mathbf {v} _ {2 -} \\mathbf {v} _ {1}\\right) = m \\left[ \\left(- \\frac {d ^ {2}}{l ^ {2}} v _ {o} \\hat {\\mathbf {i}} – \\sqrt {1 – \\frac {d ^ {2}}{l ^ {2}}} \\frac {d}{l} v _ {o} \\hat {\\mathbf {j}}\\right) – (- v _ {o} \\hat {\\mathbf {i}}) \\right] = \\left(1 – \\frac {d ^ {2}}{l ^ {2}}\\right) m v _ {o} \\hat {\\mathbf {i}} – \\sqrt {1 – \\frac {d ^ {2}}{l ^ {2}}} \\frac {d}{l} m v _ {o} \\hat {\\mathbf {j}}
P=m(v2−v1)=m[(−l2d2voi^−1−l2d2ldvoj^)−(−voi^)]=(1−l2d2)mvoi^−1−l2d2ldmvoj^
这个沿绳子方向的冲量的大小是
I=1−d2l2mvo
\\mathcal {I} = \\sqrt {1 – \\frac {d ^ {2}}{l ^ {2}}} m v _ {o}
I=1−l2d2mvo
因此,在改变速度矢量方向所需的微小时间间隔 Δt\\Delta tΔt 内,绳子中的平均力结果是
Favg=IΔt=1−d2l2mvoΔt
F _ {a v g} = \\frac {\\mathcal {I}}{\\Delta t} = \\boxed {\\sqrt {1 – \\frac {d ^ {2}}{l ^ {2}}} \\frac {m v _ {o}}{\\Delta t}}
Favg=ΔtI=1−l2d2Δtmvo
1.6 运动矢量的导数
图 1.15(a) 显示了一个嵌入在刚体 BBB 中的矢量 A\\mathbf{A}A,该刚体相对于惯性参考系(相对于恒星固定的刚性笛卡尔坐标系)运动。A\\mathbf{A}A 的大小是固定的。物体 BBB 显示在两个时间点,相隔微分时间间隔 dtdtdt。在时间 t+dtt + dtt+dt,矢量 A\\mathbf{A}A 的方向与时间 ttt 时略有不同,但其大小相同。根据 18 世纪多产的瑞士数学家莱昂哈德·欧拉 (1707 – 1783) 的众多定理之一,存在一个唯一的旋转轴,物体 BBB 以及因此 A\\mathbf{A}A 在微分时间间隔内绕该轴旋转。如果我们将两个矢量 A(t)\\mathbf{A}(t)A(t) 和 A(t+dt)\\mathbf{A}(t + dt)A(t+dt) 移动到旋转轴上的同一点,使它们尾对尾如图 1.15(b) 所示,我们可以评估由无限小旋转引起的它们之间的差异 dAd\\mathbf{A}dA。请记住,将矢量移动到平行线不会改变矢量。物体 BBB 的旋转是在垂直于瞬时旋转轴的平面内测量的。旋转量是垂直于旋转轴的线元素在时间间隔 dtdtdt 内转过的角度 dθd\\thetadθ。在图 1.15(b) 中,该线元素是 A\\mathbf{A}A 垂直于旋转轴的分量。我们可以将 A(t)\\mathbf{A}(t)A(t) 和 A(t+dt)\\mathbf{A}(t + dt)A(t+dt) 之间的差异 dAd\\mathbf{A}dA 表示为
dA=[(∥A∥⋅sinϕ)dθ]⏞dA 的大小n^(1.47)
d \\mathbf {A} = \\overbrace {\\left[ \\left(\\left\\| \\mathbf {A} \\right\\| \\cdot \\sin \\phi\\right) d \\theta \\right]} ^ {d \\mathbf {A} \\text { 的大小}} \\hat {\\mathbf {n}} \\tag {1.47}
dA=[(∥A∥⋅sinϕ)dθ]dA 的大小n^(1.47)
 |
 |
| (a) | (b) |
图 1.15 刚体的位移。
其中 n^\\hat{\\mathbf{n}}n^ 是由 A\\mathbf{A}A 和旋转轴定义的平面的单位法线,它指向旋转方向。角度 ϕ\\phiϕ 是 A\\mathbf{A}A 对旋转轴的倾角。根据定义,
dθ=∥ω∥dt(1.48)
d \\theta = \\| \\boldsymbol {\\omega} \\| d t \\tag {1.48}
dθ=∥ω∥dt(1.48)
其中 ω\\boldsymbol{\\omega}ω 是角速度矢量,它沿瞬时旋转轴指向,其方向由右手定则给出。即,右手握住旋转轴,手指指向 dθd\\thetadθ 的方向,拇指定义 ω\\boldsymbol{\\omega}ω 的方向。这在图 1.15(b) 中很明显。需要指出的是,ω\\boldsymbol{\\omega}ω 的时间导数是角加速度,通常用符号 α\\boldsymbol{\\alpha}α 表示。因此,
α=dωdt(1.49)
\\boldsymbol{\\alpha} = \\frac {d \\boldsymbol{\\omega}}{d t} \\tag {1.49}
α=dtdω(1.49)
将方程 1.48 代入方程 1.47,我们得到
dA=∥A∥⋅sinϕ⋅∥ω∥dt⋅n^=(∥ω∥⋅∥A∥⋅sinϕ)n^dt(1.50)
d \\mathbf {A} = \\| \\mathbf {A} \\| \\cdot \\sin \\phi \\cdot \\| \\boldsymbol {\\omega} \\| d t \\cdot \\hat {\\mathbf {n}} = \\left(\\| \\boldsymbol {\\omega} \\| \\cdot \\| \\mathbf {A} \\| \\cdot \\sin \\phi\\right) \\hat {\\mathbf {n}} d t \\tag {1.50}
dA=∥A∥⋅sinϕ⋅∥ω∥dt⋅n^=(∥ω∥⋅∥A∥⋅sinϕ)n^dt(1.50)
根据叉积的定义,ω×A\\boldsymbol{\\omega} \\times \\mathbf{A}ω×A 是 ω\\boldsymbol{\\omega}ω 的大小、A\\mathbf{A}A 的大小、ω\\boldsymbol{\\omega}ω 和 A\\mathbf{A}A 之间夹角的正弦以及垂直于 ω\\boldsymbol{\\omega}ω 和 A\\mathbf{A}A 平面的单位法线的乘积,在旋转方向上。即,
ω×A=∥ω∥⋅∥A∥⋅sinϕ⋅n^(1.51)
\\boldsymbol {\\omega} \\times \\mathbf {A} = \\| \\boldsymbol {\\omega} \\| \\cdot \\| \\mathbf {A} \\| \\cdot \\sin \\phi \\cdot \\hat {\\mathbf {n}} \\tag {1.51}
ω×A=∥ω∥⋅∥A∥⋅sinϕ⋅n^(1.51)
将方程 1.51 代入方程 1.50 得出
dA=ω×Adt
d \\mathbf {A} = \\boldsymbol {\\omega} \\times \\mathbf {A} d t
dA=ω×Adt
除以 dtdtdt,我们最终获得
dAdt=ω×A(如果ddt∥A∥=0)(1.52)
\\boxed {\\frac {d \\mathbf {A}}{d t} = \\boldsymbol {\\omega} \\times \\mathbf {A}} \\quad \\left(\\text {如果} \\frac {d}{d t} \\| \\mathbf {A} \\| = 0\\right) \\tag {1.52}
dtdA=ω×A(如果dtd∥A∥=0)(1.52)
方程 1.52 是我们可以用来计算大小恒定的旋转矢量的时间导数的公式。
例题 1.11
计算大小恒定的矢量 A\\mathbf{A}A 的二阶时间导数,将结果用 ω\\boldsymbol{\\omega}ω 及其导数和 A\\mathbf{A}A 表示。
解
对方程 1.52 对时间求导,我们得到
d2Adt2=ddtdAdt=ddt(ω×A)=dωdt×A+ω×dAdt
\\frac {d ^ {2} \\mathbf {A}}{d t ^ {2}} = \\frac {d}{d t} \\frac {d \\mathbf {A}}{d t} = \\frac {d}{d t} (\\boldsymbol {\\omega} \\times \\mathbf {A}) = \\frac {d \\boldsymbol {\\omega}}{d t} \\times \\mathbf {A} + \\boldsymbol {\\omega} \\times \\frac {d \\mathbf {A}}{d t}
dt2d2A=dtddtdA=dtd(ω×A)=dtdω×A+ω×dtdA
使用方程 1.49 和 1.52,这可以写成
d2Adt2=α×A+ω×(ω×A)(1.53)
\\boxed {\\frac {d ^ {2} \\mathbf {A}}{d t ^ {2}} = \\boldsymbol {\\alpha} \\times \\mathbf {A} + \\boldsymbol {\\omega} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A})} \\tag {1.53}
dt2d2A=α×A+ω×(ω×A)(1.53)
例题 1.12
计算大小恒定的矢量 A\\mathbf{A}A 的三阶导数,将结果用 ω\\boldsymbol{\\omega}ω 及其导数和 A\\mathbf{A}A 表示。
解
d3Adt3=ddtd2Adt2=ddt[α×A+ω×(ω×A)]=ddt(α×A)+ddt[ω×(ω×A)]=(dαdt×A+α×dAdt)+[dωdt×(ω×A)+ω×ddt(ω×A)]=[dαdt×A+α×(ω×A)]+[α×(ω×A)+ω×(dωdt×A+ω×dAdt)]=[dαdt×A+α×(ω×A)]+{α×(ω×A)+ω×[α×A+ω×(ω×A)]}=dαdt×A+α×(ω×A)+α×(ω×A)+ω×(α×A)+ω×[ω×(ω×A)]=dαdt×A+2α×(ω×A)+ω×(α×A)+ω×[ω×(ω×A)]
\\begin{array}{l} \\frac {d ^ {3} \\mathbf {A}}{d t ^ {3}} = \\frac {d}{d t} \\frac {d ^ {2} \\mathbf {A}}{d t ^ {2}} = \\frac {d}{d t} [ \\boldsymbol {\\alpha} \\times \\mathbf {A} + \\boldsymbol {\\omega} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) ] \\\\ = \\frac {d}{d t} (\\boldsymbol {\\alpha} \\times \\mathbf {A}) + \\frac {d}{d t} [ \\boldsymbol {\\omega} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) ] \\\\ = \\left(\\frac {d \\mathbf {\\alpha}}{d t} \\times \\mathbf {A} + \\mathbf {\\alpha} \\times \\frac {d \\mathbf {A}}{d t}\\right) + \\left[ \\frac {d \\boldsymbol {\\omega}}{d t} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) + \\boldsymbol {\\omega} \\times \\frac {d}{d t} (\\boldsymbol {\\omega} \\times \\mathbf {A}) \\right] \\\\ = \\left[ \\frac {d \\mathbf {\\alpha}}{d t} \\times \\mathbf {A} + \\mathbf {\\alpha} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) \\right] + \\left[ \\mathbf {\\alpha} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) + \\boldsymbol {\\omega} \\times \\left(\\frac {d \\boldsymbol {\\omega}}{d t} \\times \\mathbf {A} + \\boldsymbol {\\omega} \\times \\frac {d \\mathbf {A}}{d t}\\right) \\right] \\\\ = \\left[ \\frac {d \\alpha}{d t} \\times \\mathbf {A} + \\alpha \\times (\\omega \\times \\mathbf {A}) \\right] + \\left\\{\\alpha \\times (\\omega \\times \\mathbf {A}) + \\omega \\times [ \\alpha \\times \\mathbf {A} + \\omega \\times (\\omega \\times \\mathbf {A}) ] \\right\\} \\\\ = \\frac {d \\alpha}{d t} \\times \\mathbf {A} + \\alpha \\times (\\omega \\times \\mathbf {A}) + \\alpha \\times (\\omega \\times \\mathbf {A}) + \\omega \\times (\\alpha \\times \\mathbf {A}) + \\omega \\times [ \\omega \\times (\\omega \\times \\mathbf {A}) ] \\\\ = \\frac {d \\boldsymbol {\\alpha}}{d t} \\times \\mathbf {A} + 2 \\boldsymbol {\\alpha} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) + \\boldsymbol {\\omega} \\times (\\boldsymbol {\\alpha} \\times \\mathbf {A}) + \\boldsymbol {\\omega} \\times [ \\boldsymbol {\\omega} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) ] \\\\ \\end{array}
dt3d3A=dtddt2d2A=dtd[α×A+ω×(ω×A)]=dtd(α×A)+dtd[ω×(ω×A)]=(dtdα×A+α×dtdA)+[dtdω×(ω×A)+ω×dtd(ω×A)]=[dtdα×A+α×(ω×A)]+[α×(ω×A)+ω×(dtdω×A+ω×dtdA)]=[dtdα×A+α×(ω×A)]+{α×(ω×A)+ω×[α×A+ω×(ω×A)]}=dtdα×A+α×(ω×A)+α×(ω×A)+ω×(α×A)+ω×[ω×(ω×A)]=dtdα×A+2α×(ω×A)+ω×(α×A)+ω×[ω×(ω×A)]
d3Adt3=dαdt×A+2α×(ω×A)+ω×[α×A+ω×(ω×A)]
\\boxed {\\frac {d ^ {3} \\mathbf {A}}{d t ^ {3}} = \\frac {d \\alpha}{d t} \\times \\mathbf {A} + 2 \\alpha \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) + \\boldsymbol {\\omega} \\times [ \\boldsymbol {\\alpha} \\times \\mathbf {A} + \\boldsymbol {\\omega} \\times (\\boldsymbol {\\omega} \\times \\mathbf {A}) ]}
dt3d3A=dtdα×A+2α×(ω×A)+ω×[α×A+ω×(ω×A)]
设 XYZ 为刚性惯性参考系,xyz 为刚性移动参考系,如图 1.16 所示。移动系可以自行自由移动(平移和旋转),也可以附着在物理对象上,如汽车、飞机或航天器。相对于固定惯性系测量的运动学量称为绝对量(例如,绝对加速度),而相对于移动系统测量的量称为相对量(例如,相对加速度)。惯性 XYZ 系统的单位矢量是 I^\\hat{\\mathbf{I}}I^、J^\\hat{\\mathbf{J}}J^ 和 K^\\hat{\\mathbf{K}}K^,而移动 xyz 系统的单位矢量是 i^\\hat{\\mathbf{i}}i^、j^\\hat{\\mathbf{j}}j^ 和 k^\\hat{\\mathbf{k}}k^。移动系的运动是任意的,其绝对角速度为 Ω\\boldsymbol{\\Omega}Ω。然而,如果移动系刚性附着在物体上,使其不仅随物体平移而且旋转,则该参考系称为体坐标系,轴称为体轴。体坐标系显然与其绑定的物体具有相同的角速度。
设 B\\mathbf{B}B 为任意时间相关矢量。分解为沿惯性参考系的分量,解析表示为
B=BXI^+BYJ^+BZK^
\\mathbf {B} = B _ {X} \\hat {\\mathbf {I}} + B _ {Y} \\hat {\\mathbf {J}} + B _ {Z} \\hat {\\mathbf {K}}
B=BXI^+BYJ^+BZK^
其中 BXB_XBX、BYB_YBY 和 BZB_ZBZ 是时间的函数。由于 I^\\hat{\\mathbf{I}}I^、J^\\hat{\\mathbf{J}}J^ 和 K^\\hat{\\mathbf{K}}K^ 是固定的,B\\mathbf{B}B 的时间导数简单地由下式给出
dBdt=dBXdtI^+dBYdtJ^+dBZdtK^
\\frac {d \\mathbf {B}}{d t} = \\frac {d B _ {X}}{d t} \\hat {\\mathbf {I}} + \\frac {d B _ {Y}}{d t} \\hat {\\mathbf {J}} + \\frac {d B _ {Z}}{d t} \\hat {\\mathbf {K}}
dtdB=dtdBXI^+dtdBYJ^+dtdBZK^
dBX/dtdB_X/dtdBX/dt、dBY/dtdB_Y/dtdBY/dt 和 dBZ/dtdB_Z/dtdBZ/dt 是 B\\mathbf{B}B 的绝对时间导数的分量。
图 1.16 固定(惯性)和移动刚性参考系。
B\\mathbf{B}B 也可以分解为沿移动 xyz 系的分量,使得在任何瞬间,
B=Bxi^+Byj^+Bzk^(1.54)
\\mathbf {B} = B _ {x} \\hat {\\mathbf {i}} + B _ {y} \\hat {\\mathbf {j}} + B _ {z} \\hat {\\mathbf {k}} \\tag {1.54}
B=Bxi^+Byj^+Bzk^(1.54)
使用此表达式计算 B\\mathbf{B}B 的时间导数得出
dBdt=dBxdti^+dBydtj^+dBzdtk^+Bxdi^dt+Bydj^dt+Bzdk^dt(1.55)
\\frac {d \\mathbf {B}}{d t} = \\frac {d B _ {x}}{d t} \\hat {\\mathbf {i}} + \\frac {d B _ {y}}{d t} \\hat {\\mathbf {j}} + \\frac {d B _ {z}}{d t} \\hat {\\mathbf {k}} + B _ {x} \\frac {d \\hat {\\mathbf {i}}}{d t} + B _ {y} \\frac {d \\hat {\\mathbf {j}}}{d t} + B _ {z} \\frac {d \\hat {\\mathbf {k}}}{d t} \\tag {1.55}
dtdB=dtdBxi^+dtdByj^+dtdBzk^+Bxdtdi^+Bydtdj^+Bzdtdk^(1.55)
单位矢量 i^\\hat{\\mathbf{i}}i^、j^\\hat{\\mathbf{j}}j^ 和 k^\\hat{\\mathbf{k}}k^ 在空间中不是固定的,而是不断改变方向;因此,它们的时间导数不为零。它们显然具有恒定的大小(单位),并且由于附着在 xyz 系上,它们都具有角速度 Ω\\boldsymbol{\\Omega}Ω。从方程 1.52 可以得出
di^dt=Ω×i^dj^dt=Ω×j^dk^dt=Ω×k^
\\frac {d \\hat {\\mathbf {i}}}{d t} = \\boldsymbol {\\Omega} \\times \\hat {\\mathbf {i}} \\quad \\frac {d \\hat {\\mathbf {j}}}{d t} = \\boldsymbol {\\Omega} \\times \\hat {\\mathbf {j}} \\quad \\frac {d \\hat {\\mathbf {k}}}{d t} = \\boldsymbol {\\Omega} \\times \\hat {\\mathbf {k}}
dtdi^=Ω×i^dtdj^=Ω×j^dtdk^=Ω×k^
将这些代入方程 1.55 的右侧得出
dBdt=dBxdti^+dBydtj^+dBzdtk^+Bx(Ω×i^)+By(Ω×j^)+Bz(Ω×k^)=dBxdti^+dBydtj^+dBzdtk^+(Ω×Bxi^)+(Ω×Byj^)+(Ω×Bzk^)=dBxdti^+dBydtj^+dBzdtk^+Ω×(Bxi^+Byj^+Bzk^)
\\begin{array}{l} \\frac {d \\mathbf {B}}{d t} = \\frac {d B _ {x}}{d t} \\hat {\\mathbf {i}} + \\frac {d B _ {y}}{d t} \\hat {\\mathbf {j}} + \\frac {d B _ {z}}{d t} \\hat {\\mathbf {k}} + B _ {x} (\\boldsymbol {\\Omega} \\times \\hat {\\mathbf {i}}) + B _ {y} (\\boldsymbol {\\Omega} \\times \\hat {\\mathbf {j}}) + B _ {z} (\\boldsymbol {\\Omega} \\times \\hat {\\mathbf {k}}) \\\\ = \\frac {d B _ {x}}{d t} \\hat {\\mathbf {i}} + \\frac {d B _ {y}}{d t} \\hat {\\mathbf {j}} + \\frac {d B _ {z}}{d t} \\hat {\\mathbf {k}} + (\\boldsymbol {\\Omega} \\times B _ {x} \\hat {\\mathbf {i}}) + (\\boldsymbol {\\Omega} \\times B _ {y} \\hat {\\mathbf {j}}) + (\\boldsymbol {\\Omega} \\times B _ {z} \\hat {\\mathbf {k}}) \\\\ = \\frac {d B _ {x}}{d t} \\hat {\\mathbf {i}} + \\frac {d B _ {y}}{d t} \\hat {\\mathbf {j}} + \\frac {d B _ {z}}{d t} \\hat {\\mathbf {k}} + \\boldsymbol {\\Omega} \\times \\left(B _ {x} \\hat {\\mathbf {i}} + B _ {y} \\hat {\\mathbf {j}} + B _ {z} \\hat {\\mathbf {k}}\\right) \\\\ \\end{array}
dtdB=dtdBxi^+dtdByj^+dtdBzk^+Bx(Ω×i^)+By(Ω×j^)+Bz(Ω×k^)=dtdBxi^+dtdByj^+dtdBzk^+(Ω×Bxi^)+(Ω×Byj^)+(Ω×Bzk^)=dtdBxi^+dtdByj^+dtdBzk^+Ω×(Bxi^+Byj^+Bzk^)
鉴于方程 1.54,这可以写成
dBdt=dBdt)rel+Ω×B(1.56)
\\left. \\frac {d \\mathbf {B}}{d t} = \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} + \\boldsymbol {\\Omega} \\times \\mathbf {B} \\tag {1.56}
dtdB=dtdB)rel+Ω×B(1.56)
其中
dBdt)rel=dBxdti^+dBydtj^+dBzdtk^(1.57)
\\left. \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} = \\frac {d B _ {x}}{d t} \\hat {\\mathbf {i}} + \\frac {d B _ {y}}{d t} \\hat {\\mathbf {j}} + \\frac {d B _ {z}}{d t} \\hat {\\mathbf {k}} \\tag {1.57}
dtdB)rel=dtdBxi^+dtdByj^+dtdBzk^(1.57)
dB/dt)reld\\mathbf{B}/dt)_{\\text{rel}}dB/dt)rel 是 B\\mathbf{B}B 相对于移动系的时间导数。方程 1.56 显示了如何从相对时间导数获得绝对时间导数。显然,仅当移动系处于纯平移 (Ω=0)(\\boldsymbol{\\Omega} = \\mathbf{0})(Ω=0) 时,dB/dt=dB/dt)reld\\mathbf{B}/dt = d\\mathbf{B}/dt)_{\\text{rel}}dB/dt=dB/dt)rel。
方程 1.56 可以递归地用于计算高阶时间导数。因此,对方程 1.56 对 ttt 求导,我们得到
d2Bdt2=ddtdBdt)rel+dΩdt×B+Ω×dBdt
\\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}} = \\left. \\frac {d}{d t} \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} + \\frac {d \\boldsymbol {\\Omega}}{d t} \\times \\mathbf {B} + \\boldsymbol {\\Omega} \\times \\frac {d \\mathbf {B}}{d t}
dt2d2B=dtddtdB)rel+dtdΩ×B+Ω×dtdB
在最后一项中使用方程 1.56 得出
d2Bdt2=ddtdBdt)rel+dΩdt×B+Ω×[dBdt)rel+Ω×B(1.58)
\\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}} = \\left. \\frac {d}{d t} \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} + \\frac {d \\boldsymbol {\\Omega}}{d t} \\times \\mathbf {B} + \\boldsymbol {\\Omega} \\times \\left[ \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} + \\boldsymbol {\\Omega} \\times \\mathbf {B} \\tag {1.58}
dt2d2B=dtddtdB)rel+dtdΩ×B+Ω×[dtdB)rel+Ω×B(1.58)
方程 1.56 也意味着
ddtdBdt)rel=d2Bdt2)rel+Ω×dBdt)rel(1.59)
\\left. \\frac {d}{d t} \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} = \\left. \\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}}\\right) _ {\\text {rel}} + \\boldsymbol {\\Omega} \\times \\left. \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} \\tag {1.59}
dtddtdB)rel=dt2d2B)rel+Ω×dtdB)rel(1.59)
其中
d2Bdt2)rel=d2Bxdt2i^+d2Bydt2j^+d2Bzdt2k^
\\left. \\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}}\\right) _ {\\mathrm {rel}} = \\frac {d ^ {2} B _ {x}}{d t ^ {2}} \\hat {\\mathbf {i}} + \\frac {d ^ {2} B _ {y}}{d t ^ {2}} \\hat {\\mathbf {j}} + \\frac {d ^ {2} B _ {z}}{d t ^ {2}} \\hat {\\mathbf {k}}
dt2d2B)rel=dt2d2Bxi^+dt2d2Byj^+dt2d2Bzk^
将方程 1.59 代入方程 1.58 得出
d2Bdt2=[d2Bdt2]rel+Ω×dBdt)rel+dΩdt×B+Ω×[dBdt)rel+Ω×B
\\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}} = \\left[ \\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}} \\right] _ {\\mathrm {rel}} + \\left. \\boldsymbol {\\Omega} \\times \\frac {d \\mathbf {B}}{d t}\\right) _ {\\mathrm {rel}} + \\frac {d \\boldsymbol {\\Omega}}{d t} \\times \\mathbf {B} + \\boldsymbol {\\Omega} \\times \\left[ \\frac {d \\mathbf {B}}{d t}\\right) _ {\\mathrm {rel}} + \\boldsymbol {\\Omega} \\times \\mathbf {B}
dt2d2B=[dt2d2B]rel+Ω×dtdB)rel+dtdΩ×B+Ω×[dtdB)rel+Ω×B
合并项,这变为
d2Bdt2=d2Bdt2)rel+Ω˙×B+Ω×(Ω×B)+2Ω×dBdt)rel(1.60)
\\left. \\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}} = \\frac {d ^ {2} \\mathbf {B}}{d t ^ {2}}\\right) _ {\\text {rel}} + \\dot {\\boldsymbol {\\Omega}} \\times \\mathbf {B} + \\boldsymbol {\\Omega} \\times (\\boldsymbol {\\Omega} \\times \\mathbf {B}) + 2 \\boldsymbol {\\Omega} \\times \\left. \\frac {d \\mathbf {B}}{d t}\\right) _ {\\text {rel}} \\tag {1.60}
dt2d2B=dt2d2B)rel+Ω˙×B+Ω×(Ω×B)+2Ω×dtdB)rel(1.60)
其中 Ω˙≡dΩ/dt\\dot{\\boldsymbol{\\Omega}} \\equiv d\\boldsymbol{\\Omega}/dtΩ˙≡dΩ/dt 是 xyz 系的绝对角加速度。
高阶时间导数的公式以类似的方式找到。





评论前必须登录!
注册