 网硕互联帮助中心
网硕互联帮助中心【实战】从仰望星空到精确锁定 —— 初轨计算 (IOD) 的终极通关指南 (习题 5.25-5.27)
💡 摘要:在茫茫宇宙中,如何仅凭地面观测到的三个瞬时角度,就推算出卫星的完整轨道?本文将带你走过初轨确定 (Initial Orbit Determination, IOD) 的“三部曲”:从高斯法的初步估算,到通用变量法的迭代精修,最后转化为直观的轨道根数。我们将见证一个深空目标的“真实面目”是如何被数学逻辑一步步揭开的。
📚 1. 预备知识 (Prerequisites)
在开始这场数学冒险之前,你需要装备以下工具:
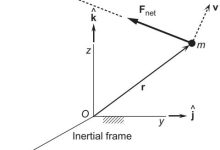
- 初轨确定 (IOD):在没有任何先验信息的情况下,仅利用角度(赤经/赤纬)确定卫星轨道的过程。
- 高斯法 (Gauss Method):定轨领域的经典算法,利用动力学级数近似解决非线性观测问题。
- 通用变量法 (Universal Variables):轨道传播的“万能钥匙”,无论轨道是椭圆还是双曲线,它都能稳健处理。
- 轨道六根数 (COE):描述轨道的“身份证”,包括大小 (
a
,
e
a, e
a,e)、姿态 (i
,
Ω
,
ω
i, \\Omega, \\omega
i,Ω,ω) 和位置 (θ
\\theta
θ)。
🚀 2. 任务背景 (The Mission)
2.1 原始题目 (Original Problems)
本次任务由三道连贯的习题组成:
| 0.0 | 150 | 157.783 | 24.2403 |
| 5.0 | 151.253 | 159.221 | 27.2993 |
| 10.0 | 152.507 | 160.526 | 29.8982 |
2.2 场景化背景 (Scenario)
想象你是一名航天监测中心的工程师。雷达在 10 分钟内捕捉到了一个不明飞行物的三次闪烁。指挥官要求你:
🔮 3. 核心魔法:算法解读 (Algorithm Explanation)
我们将整个流程拆解为三层架构:
3.1 三层进化论
- 通过构建一个巧妙的八次多项式,仅凭几何关系“猜”出中间时刻的距离
r
2
r_2
r2。
- 利用精确的动力学传播(通用变量)建立反馈环。针对可能出现的数值发散,我们使用了阻尼因子(就像给疯狂跳动的指针装上减震器)。
- 将冰冷的坐标系分量转换成人类直观理解的几何参数(如离心率
e
e
e)。
3.2 流程图解
#mermaid-svg-AdenmuB32pfSB6aX{font-family:\”trebuchet ms\”,verdana,arial,sans-serif;font-size:16px;fill:#333;}@keyframes edge-animation-frame{from{stroke-dashoffset:0;}}@keyframes dash{to{stroke-dashoffset:0;}}#mermaid-svg-AdenmuB32pfSB6aX .edge-animation-slow{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 50s linear infinite;stroke-linecap:round;}#mermaid-svg-AdenmuB32pfSB6aX .edge-animation-fast{stroke-dasharray:9,5!important;stroke-dashoffset:900;animation:dash 20s linear infinite;stroke-linecap:round;}#mermaid-svg-AdenmuB32pfSB6aX .error-icon{fill:#552222;}#mermaid-svg-AdenmuB32pfSB6aX .error-text{fill:#552222;stroke:#552222;}#mermaid-svg-AdenmuB32pfSB6aX .edge-thickness-normal{stroke-width:1px;}#mermaid-svg-AdenmuB32pfSB6aX .edge-thickness-thick{stroke-width:3.5px;}#mermaid-svg-AdenmuB32pfSB6aX .edge-pattern-solid{stroke-dasharray:0;}#mermaid-svg-AdenmuB32pfSB6aX .edge-thickness-invisible{stroke-width:0;fill:none;}#mermaid-svg-AdenmuB32pfSB6aX .edge-pattern-dashed{stroke-dasharray:3;}#mermaid-svg-AdenmuB32pfSB6aX .edge-pattern-dotted{stroke-dasharray:2;}#mermaid-svg-AdenmuB32pfSB6aX .marker{fill:#333333;stroke:#333333;}#mermaid-svg-AdenmuB32pfSB6aX .marker.cross{stroke:#333333;}#mermaid-svg-AdenmuB32pfSB6aX svg{font-family:\”trebuchet ms\”,verdana,arial,sans-serif;font-size:16px;}#mermaid-svg-AdenmuB32pfSB6aX p{margin:0;}#mermaid-svg-AdenmuB32pfSB6aX .label{font-family:\”trebuchet ms\”,verdana,arial,sans-serif;color:#333;}#mermaid-svg-AdenmuB32pfSB6aX .cluster-label text{fill:#333;}#mermaid-svg-AdenmuB32pfSB6aX .cluster-label span{color:#333;}#mermaid-svg-AdenmuB32pfSB6aX .cluster-label span p{background-color:transparent;}#mermaid-svg-AdenmuB32pfSB6aX .label text,#mermaid-svg-AdenmuB32pfSB6aX span{fill:#333;color:#333;}#mermaid-svg-AdenmuB32pfSB6aX .node rect,#mermaid-svg-AdenmuB32pfSB6aX .node circle,#mermaid-svg-AdenmuB32pfSB6aX .node ellipse,#mermaid-svg-AdenmuB32pfSB6aX .node polygon,#mermaid-svg-AdenmuB32pfSB6aX .node path{fill:#ECECFF;stroke:#9370DB;stroke-width:1px;}#mermaid-svg-AdenmuB32pfSB6aX .rough-node .label text,#mermaid-svg-AdenmuB32pfSB6aX .node .label text,#mermaid-svg-AdenmuB32pfSB6aX .image-shape .label,#mermaid-svg-AdenmuB32pfSB6aX .icon-shape .label{text-anchor:middle;}#mermaid-svg-AdenmuB32pfSB6aX .node .katex path{fill:#000;stroke:#000;stroke-width:1px;}#mermaid-svg-AdenmuB32pfSB6aX .rough-node .label,#mermaid-svg-AdenmuB32pfSB6aX .node .label,#mermaid-svg-AdenmuB32pfSB6aX .image-shape .label,#mermaid-svg-AdenmuB32pfSB6aX .icon-shape .label{text-align:center;}#mermaid-svg-AdenmuB32pfSB6aX .node.clickable{cursor:pointer;}#mermaid-svg-AdenmuB32pfSB6aX .root .anchor path{fill:#333333!important;stroke-width:0;stroke:#333333;}#mermaid-svg-AdenmuB32pfSB6aX .arrowheadPath{fill:#333333;}#mermaid-svg-AdenmuB32pfSB6aX .edgePath .path{stroke:#333333;stroke-width:2.0px;}#mermaid-svg-AdenmuB32pfSB6aX .flowchart-link{stroke:#333333;fill:none;}#mermaid-svg-AdenmuB32pfSB6aX .edgeLabel{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-AdenmuB32pfSB6aX .edgeLabel p{background-color:rgba(232,232,232, 0.8);}#mermaid-svg-AdenmuB32pfSB6aX .edgeLabel rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-AdenmuB32pfSB6aX .labelBkg{background-color:rgba(232, 232, 232, 0.5);}#mermaid-svg-AdenmuB32pfSB6aX .cluster rect{fill:#ffffde;stroke:#aaaa33;stroke-width:1px;}#mermaid-svg-AdenmuB32pfSB6aX .cluster text{fill:#333;}#mermaid-svg-AdenmuB32pfSB6aX .cluster span{color:#333;}#mermaid-svg-AdenmuB32pfSB6aX div.mermaidTooltip{position:absolute;text-align:center;max-width:200px;padding:2px;font-family:\”trebuchet ms\”,verdana,arial,sans-serif;font-size:12px;background:hsl(80, 100%, 96.2745098039%);border:1px solid #aaaa33;border-radius:2px;pointer-events:none;z-index:100;}#mermaid-svg-AdenmuB32pfSB6aX .flowchartTitleText{text-anchor:middle;font-size:18px;fill:#333;}#mermaid-svg-AdenmuB32pfSB6aX rect.text{fill:none;stroke-width:0;}#mermaid-svg-AdenmuB32pfSB6aX .icon-shape,#mermaid-svg-AdenmuB32pfSB6aX .image-shape{background-color:rgba(232,232,232, 0.8);text-align:center;}#mermaid-svg-AdenmuB32pfSB6aX .icon-shape p,#mermaid-svg-AdenmuB32pfSB6aX .image-shape p{background-color:rgba(232,232,232, 0.8);padding:2px;}#mermaid-svg-AdenmuB32pfSB6aX .icon-shape rect,#mermaid-svg-AdenmuB32pfSB6aX .image-shape rect{opacity:0.5;background-color:rgba(232,232,232, 0.8);fill:rgba(232,232,232, 0.8);}#mermaid-svg-AdenmuB32pfSB6aX .label-icon{display:inline-block;height:1em;overflow:visible;vertical-align:-0.125em;}#mermaid-svg-AdenmuB32pfSB6aX .node .label-icon path{fill:currentColor;stroke:revert;stroke-width:revert;}#mermaid-svg-AdenmuB32pfSB6aX :root{–mermaid-font-family:\”trebuchet ms\”,verdana,arial,sans-serif;}
阻尼更新
三次角度观测
高斯多项式: 初步估计 r2
迭代改进: 通用变量传播
精确状态向量 r, v
坐标变换: 提取轨道特征
最终轨道根数
3.3 关键公式
- 高斯多项式核心:
r
2
8
−
(
a
2
+
a
b
cos
ϕ
)
r
2
6
+
⋯
=
0
r_2^8 – (a^2 + ab \\cos \\phi) r_2^6 + \\dots = 0
r28−(a2+abcosϕ)r26+⋯=0 (其中a
,
b
a, b
a,b 由观测几何和时间间隔决定) - Lagrange 系数 (f, g):
r
(
t
)
=
f
r
0
+
g
v
0
\\mathbf{r}(t) = f \\mathbf{r}_0 + g \\mathbf{v}_0
r(t)=fr0+gv0 - 通用变量传播:
χ
n
+
1
=
χ
n
−
f
(
χ
n
)
f
′
(
χ
n
)
\\chi_{n+1} = \\chi_n – \\frac{f(\\chi_n)}{f'(\\chi_n)}
χn+1=χn−f′(χn)f(χn)
💻 4. Python 代码实战 (Code Deep Dive)
我们将核心逻辑拆解为三个关键片段。
4.1 关键片段一:驯服八次多项式 (习题 5.25)
# 构建高斯多项式系数
A = ... # 几何项
B = ... # 动力学项
coeffs = [1, 0, –(A**2 + a_val), 0, 0, –B, 0, 0, –B**2]
roots = np.roots(coeffs)
# 筛选合理的正实根
r2_guess = [r.real for r in roots if np.isreal(r) and r.real > R_EARTH][0]
解读:这是“无中生有”的关键。多项式的根直接给出了卫星到地心的距离,让后续计算有了落脚点。
4.2 关键片段二:阻尼迭代精修 (习题 5.26)
# 面对病态矩阵的生存之道
alpha_damp = 0.1 # 阻尼因子,防止修正过猛导致发散
rho_new = (1 – alpha_damp) * rho_old + alpha_damp * rho_calculated
解读:在精密定轨中,直接迭代往往会因为观测点太近(病态问题)而跑飞。阻尼因子就像是一位经验丰富的舵手,让航向缓慢而坚定地向真值靠拢。
4.3 关键片段三:真相大白 (习题 5.27)
# 矢量运算提取 COE
h_vec = np.cross(r, v)
e_vec = (1/MU) * (np.cross(v, h_vec) – MU * r/np.linalg.norm(r))
ecc = np.linalg.norm(e_vec)
解读:通过角动量和偏心率矢量的叉乘运算,我们拨开了坐标系的迷雾,直接看到了轨道的几何本质。
📊 5. 结果揭秘 (The Result)
5.1 习题 5.25:初步估计 (Gauss Method)
在高斯法的第一步,我们得到了卫星位置的初步估计。此时误差较大,主要是因为
f
,
g
f, g
f,g 级数截断导致的。
- 中间时刻地心距
r
2
r_2
r2: 22360 km - 位置向量
r
2
\\mathbf{r}_2
r2: [-25858.3, 10285.8, 18227.9] km - 速度向量
v
2
\\mathbf{v}_2
v2: [-4.606, -0.597, 7.203] km/s
5.2 习题 5.26:精密定轨 (Iterative Improvement)
经过 50 次迭代修正,消除级数近似误差后,结果发生了显著变化:
- 最终收敛地心距
r
2
r_2
r2: 25168 km (相比初猜修正了约 2800 km!) - 位置向量
r
2
\\mathbf{r}_2
r2: [-19081.0, 7714.2, 14486.6] km - 速度向量
v
2
\\mathbf{v}_2
v2: [-3.278, -0.485, 5.082] km/s
5.3 习题 5.27:轨道根数 (COE)
将精密定轨后的状态向量翻译成“轨道语言”:
- 角动量
h
h
h: 76007.10 km²/s - 半长轴
a
a
a: -77708.99 km (负值预示着双曲线) - 离心率
e
e
e: 1.08927 (确认为双曲线轨道) - 轨道倾角
i
i
i: 62.98° - 升交点赤经
Ω
\\Omega
Ω: 136.95° - 近地点幅角
ω
\\omega
ω: 287.33° - 真近点角
θ
\\theta
θ: 112.92°
🧐 6. 深度数据分析 (Analysis)
-
进化的历程:
阶段中间时刻距离 r
2
r_2
r2备注高斯法初猜 (5.25) 22360 km 粗糙,存在级数截断误差 最终收敛 (5.26) 25168 km 达到动力学自洽 -
离心率
e
>
1
e > 1
e>1:这是一个重磅炸弹!这意味着该目标不受地球引力束缚。
-
半长轴
a
<
0
a < 0
a<0:典型的双曲线轨道特征。
-
结论:这颗“卫星”实际上是一个双曲线轨道掠过者。它可能是一个深空探测器的逃逸阶段,或者是一个飞越地球的小天体。如果我们只停留在第一步的估算,可能会误以为它是一个大椭圆卫星!
🧠 7. 扩展思考:其他解法 (Alternative Approaches)
- Gibbs 法:如果你能直接测量到三个位置矢量(而不是角度),Gibbs 法会更直接。
- 最小二乘微分修正:在实际工程中,我们会利用成百上千个点进行最小二乘拟合,那才是真正的“精雕细琢”。
- 双 r 迭代:高斯法的现代改进版,对于大弧度观测表现更好。
🌌 7. 工程应用与展望 (Engineering Impact)
- 应用场景:这套流程是空间态势感知 (SSA) 的基石。无论是监测太空垃圾,还是拦截不明飞行物,都需要先进行 IOD,再进行精密定轨。
- 局限性:本模型忽略了地球非球形引力 (
J
2
J_2
J2) 和大气阻力。在低轨卫星的长期预报中,这些摄动项是不可忽视的。
📝 8. 总结 (Summary)
通过这三道习题的连贯实战,我们掌握了:
e
e
e 和
a
a
a 中一眼识别出双曲线轨道的“逃逸者”本质。
声明
本文由AI生成。





评论前必须登录!
注册