 网硕互联帮助中心
网硕互联帮助中心
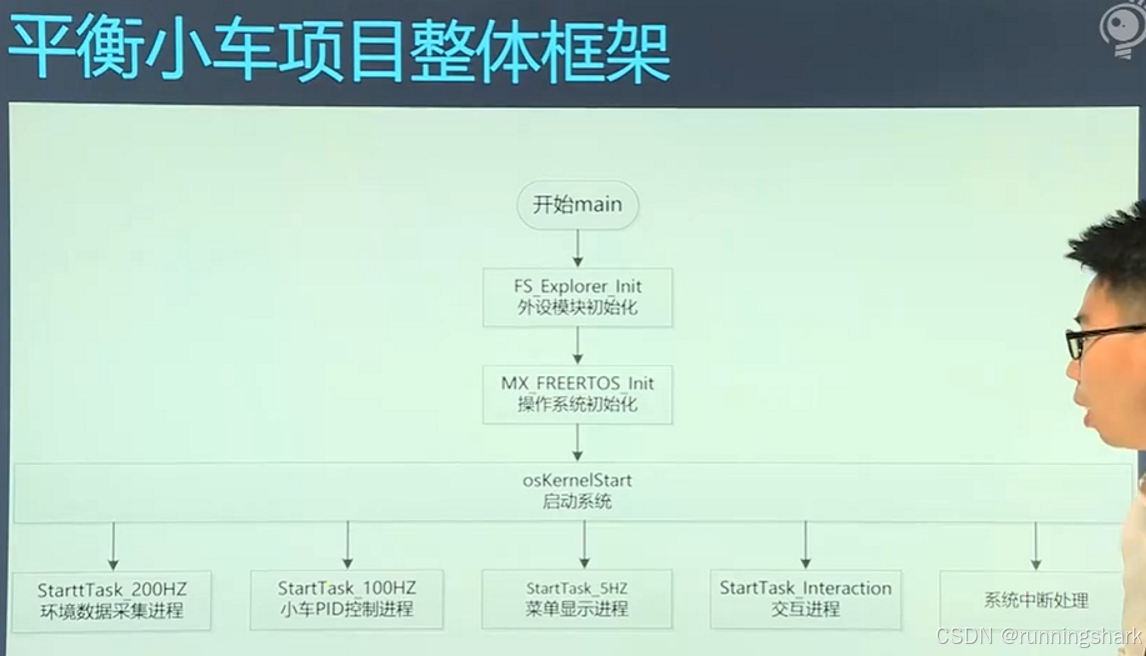
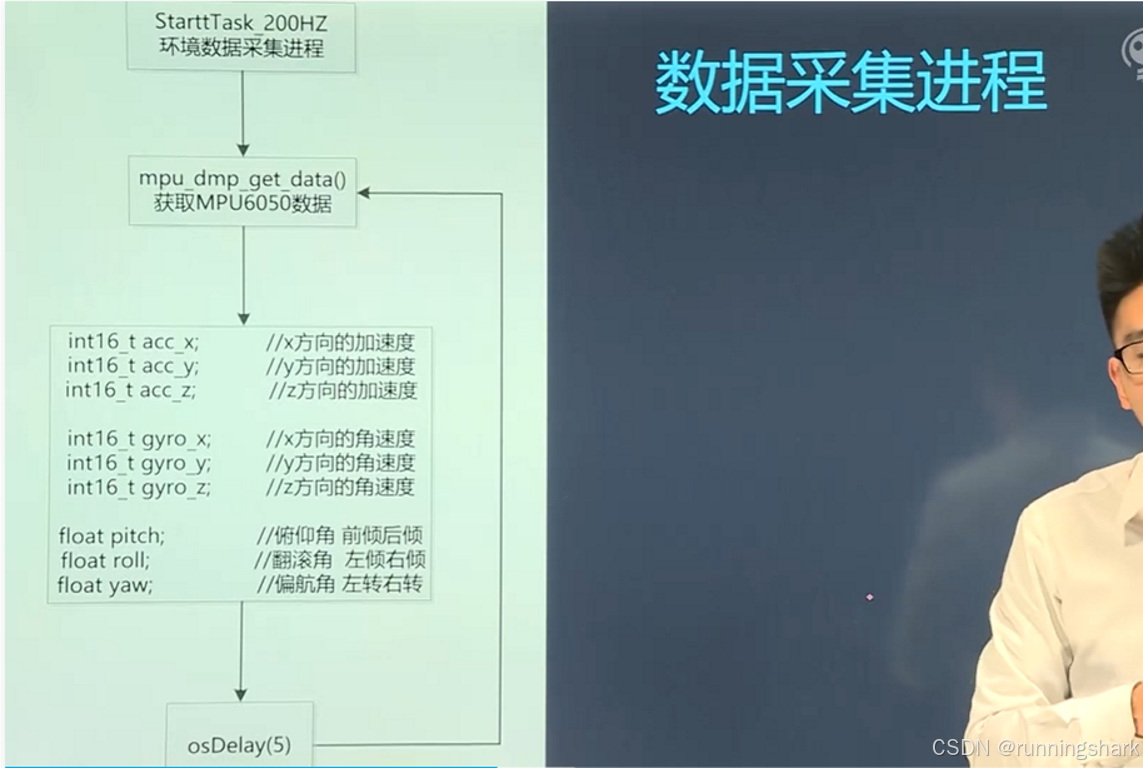
MPU6050;
俯仰角
翻滚角
偏航角
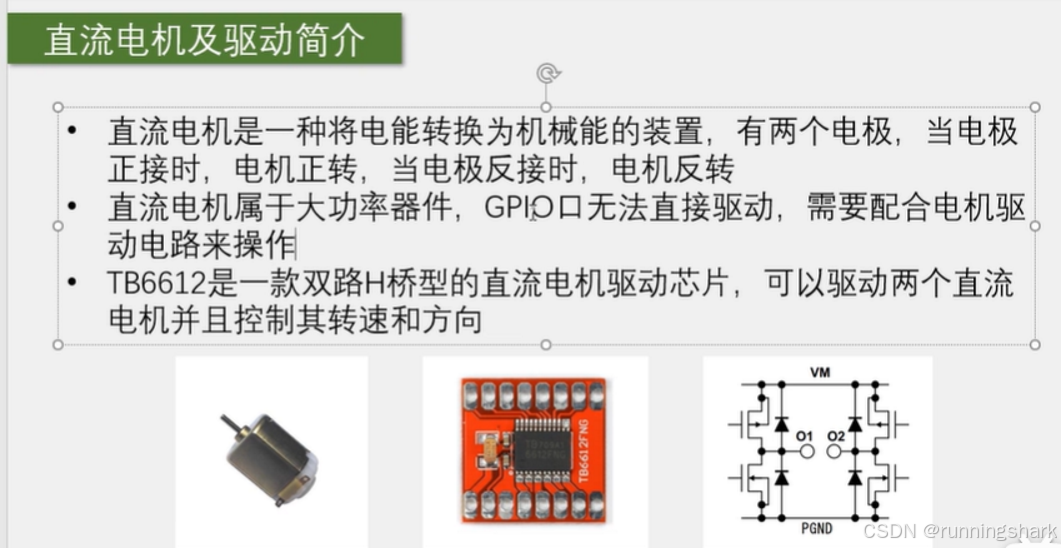
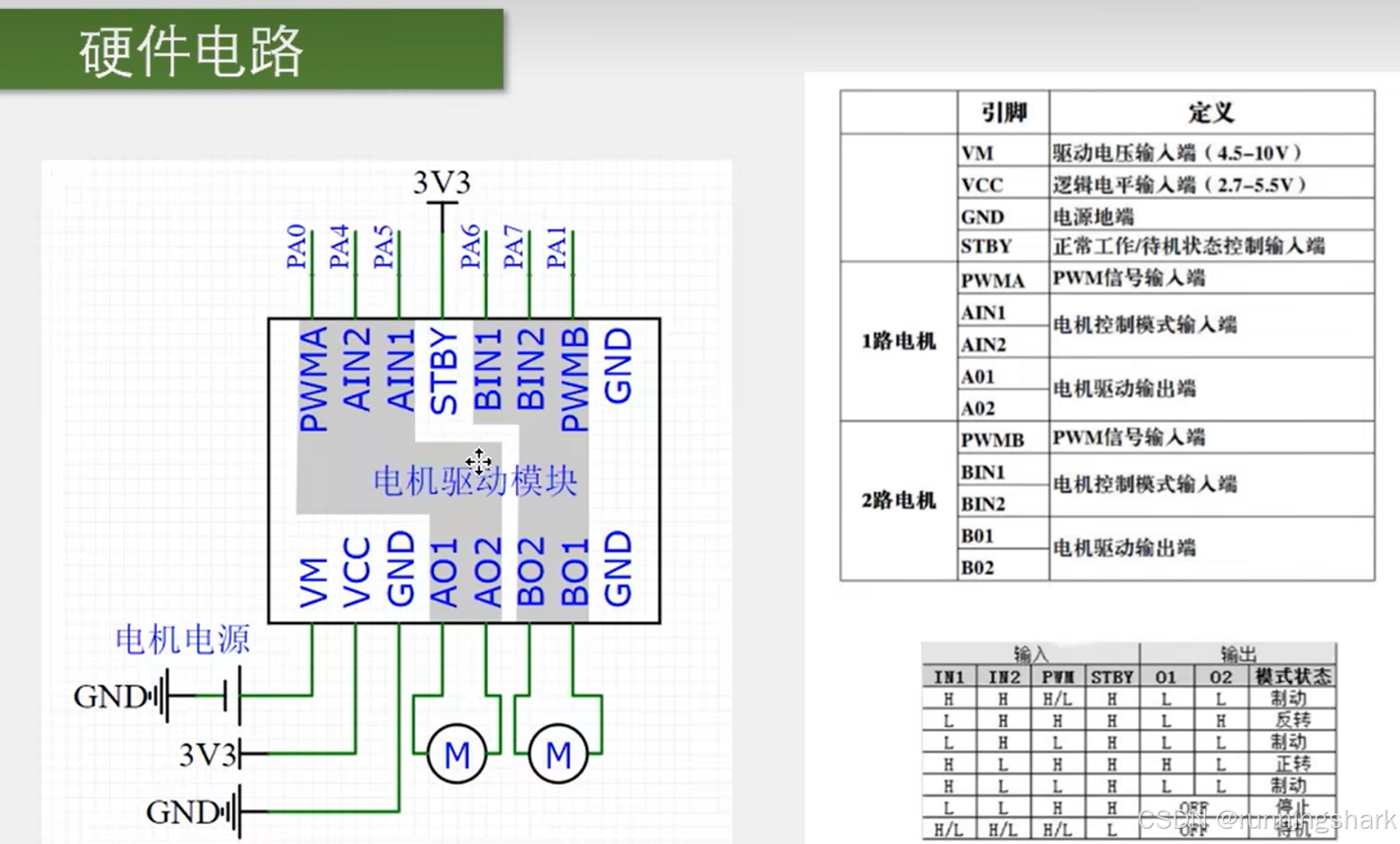
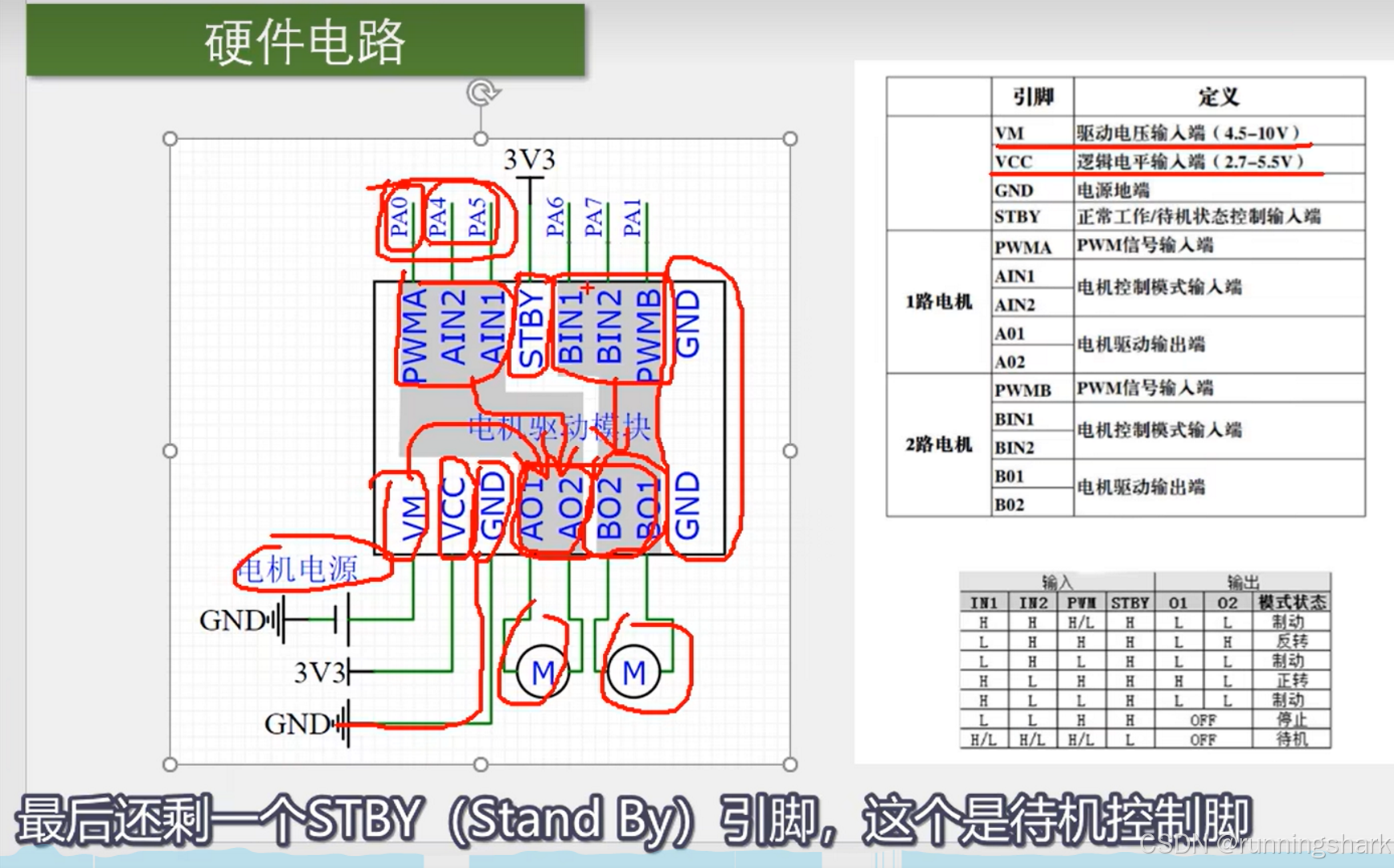
TB6612




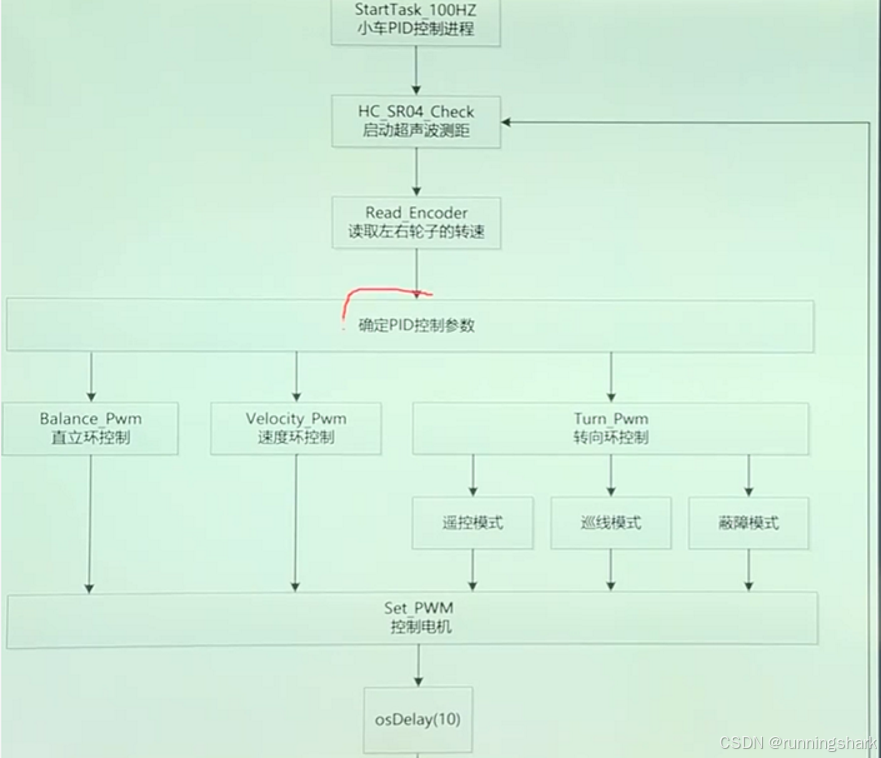
PID
1.PID基础知识

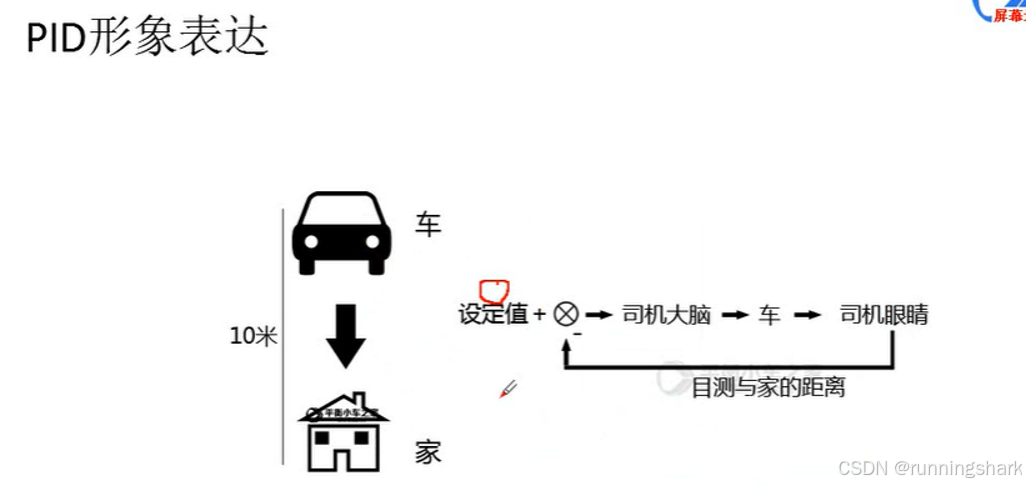





设定值和反馈值相比较就是偏差

比例项就是一个系数乘以一个偏差
比例:提高反应速度,减小静差
积分:消除静态误差
微分项:减小震荡以及超调
直立环,让角度趋于0
速度环,让速度趋于0

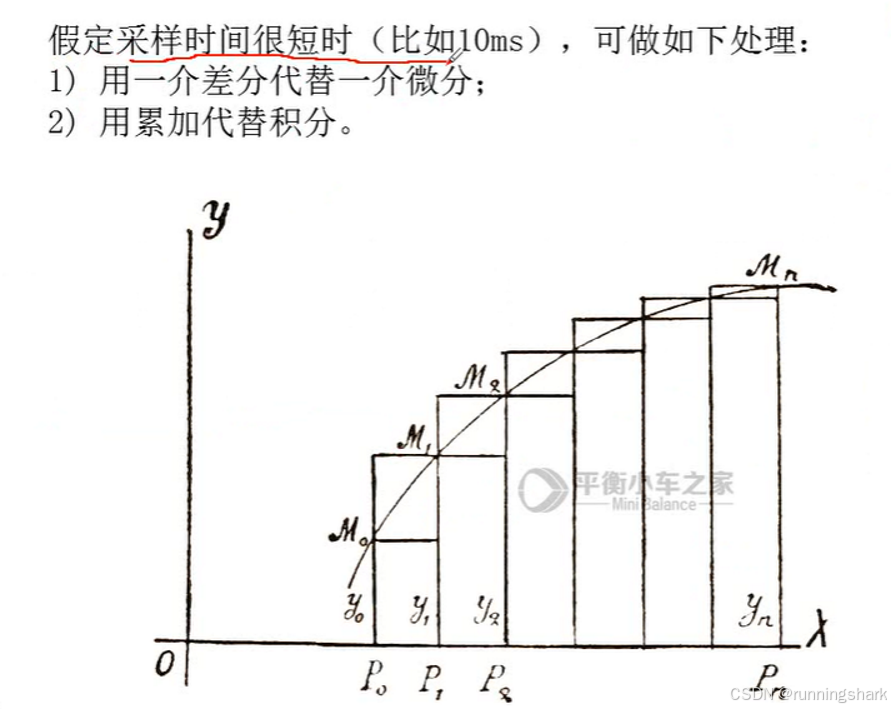
积分项,一个ki,积分时间常数乘EK的积分,从0到k
微分,就是一个求导,本次的偏差减去上次的偏差再除以一个单位时间

PID有两种,一个是位置式,一个是增量式









加速度反应的是位置的变化率
滤波,测速算法
关于滤波算法
方案一: 卡尔曼滤波,可以在有大量干扰的情况下,从已知测量方差的存在噪声的数据中预测估算出系统的最优状态[3],利用卡尔曼滤波可以从MPU6050的原始数据中得到一组接近真值、较为准确的智能车姿态数据。
方案二: 经典数字滤波器,主要包括低通、高通、带通滤波器,互补滤波器属于带通滤波器的变种。计算角度时,一般通过角加速度和角速度两种方式计算得到角度,因为两种角度的得出方式不同,在融合原始数据时需要一个融合系数[4]。在将两种方式得到的角度进行互补滤波后即可得到一个反应迅速、角度跟踪较为准确的姿态数据。
在进行两种方案的对比选择中,发现MPU6050芯片内部自带运动数据处理运算单元(DMP),通过DMP可以直接输出芯片的姿态角,包括俯仰角、偏航角和滚转角,而俯仰角即芯片所在平面与水平面的夹角,也就是上文提到的角度值。这样,通过使用MPU6050的DMP既可以得到一个较为准确的角度值,又可以减轻微处理器的运算负担,但为了使最后的数据更接近真值,在速度控制上仍然使用了低通滤波算法。最后采用的方案是在方案二的基础上调用了MPU6050的DMP,虽然程序上要移植大量的MPU6050的固件库,但数据更加准确。
关于控制算法
控制算法采用的是久经工业现场考验的PID算法[5],其控制算法较为简单但控制性能比较可靠稳定、鲁棒性较强、参数整定的方案较为成熟并且无需建立数学模型,因此为了实现智能车的自主平衡,控制算法采用的是PID算法,涉及到直立PID、速度PID和转向PID[6]。
关于测速算法
方案一:位置差分法(即M法),测量规定时间内齿轮转过的角度值
方案二:定角测时法(即T法),测量齿轮转过固定角度所用的时间
M法的程序编写简单,虽然测量低速脉冲时可能会有一些误差,但是测量高速时平稳性和精度都较高;T法一般是测量两个脉冲之间的时间间隔确定被测速度,适合测量低速情况,但车轮转一圈会产生几十上百个脉冲,使用T法不太方便,采用方案一。
3 系统的硬件设计及系统流程
3.1 单片机控制电路
ARM公司推出的 Cortex-M 系列微处理器是市场上较为主流的芯片,经多方比较,本实验平台选择 STM32F103C8T6作为核心芯片,该芯片是新一代 Cortex-M3内核的微处理器,具有 72 MHz 主频、20K字节SRAM、128K字节闪存,提供两个12位adc(16通道),三个通用16位定时器加上一个PWM定时器,多达两个I2Cs和SPIs,三个usart[11],一个USB,一个CAN, 2个看门狗定时器, CRC计算单元,7通道DMA控制器。而且有官方提供的专门的开发库,操作调试更加方便简单[12] 。外围电路模块部分围绕主芯片设计,主要组成及功能如下:
4.1.2 算法介绍
低通滤波器算法:Encoder_Least =(speed_left+speed_right)-0;
Encoder *= 0.8;
Encoder += Encoder_Least*0.2;
上式中Encoder_Least是最新速度偏差; 第2、3个程序可以理解为Y(n)=αX(n)+(1-α)Y(n-1),其中X(n)等同于Encoder_Least,代表本次采样值;Y(n-1)等同于Encoder,代表上次滤波输出值;α是滤波系数,在上式中是0.2。
一阶互补滤波算法:g_fAngle = 0.02 * Angle_ax + (0.98) * (g_fAngle + GY * dt);
上式中左边的g_fAngle为实际得到的角度;Angle_ax为角加速度换算后的角度值,因为角加速度受车体震荡等因素会产生高频噪声,所以对其进行低通滤波,滤除高频信号,因此融合系数较小;右边的g_fAngle可以理解为上一次的角度;GY是角速度,dt是时间,GY *计算dt时间段内通过的角度,通过对角度的不断积分得到一个较为准确的角度,可信度和融合系数较大,有点类似高通滤波。
PID算法:balance=CarAngle.Kp*Bias+CarAngle.Kd*Gyro;
Velocity=Encoder*CarSpeed.Kp+Encoder_Integral*CarSpeed.Ki;
Turn = -Turn_Target * Kp – gyro * Kd;
上面第1个程序是直立PD算法,即角度环控制算法,属于位置PD算法[15]。通过此算法可以实现智能车短时间的直立平衡状态,其中Bias是小车偏离水平面的角度,数值为0时即与地面平行;Gyro是角速度值,通过调节Kd可以减缓小车震荡;具体调节步骤如图4-2,当小车向前倾倒时,车轮跟随小车前进的方向,使其有一个向后的力,反之亦然,调参数时的最好现象是小车对角度变化反应敏感且没有震荡。
图4-2 直立小车运动模型
第2个程序是速度PI控制,Encoder是经过低通滤波输出的当前速度值,因为速度控制和直立控制输出值是要加到一起的,低通滤波可以减缓速度差值对直立控制的干扰;Encoder_Integral是对速度的积分,即位移,积分控制的是速度的静差,对Encoder_Integra的限幅就是对速度的限幅;直立环和速度环一起调试,即可实现小车的长时间直立[16],直立环是负反馈,速度环是正反馈,即小车因为直立环原因向一个方向加速时,速度环的作用是产生一个同方向更快的速度。
第3个程序是转向PD算法,Turn_Target是转向速度值,数值较大时转向速度块,反之慢,数值大小和转向前小车的速度有关,即小车的旋转速度可以跟随实时速度,增加小车的适应性;gyro是角速度值,gyro * Kd可以减小小车转向时的震荡;据体控制方法就是将小车的左轮PWM输出值减去转向PD输出值,小车的右轮PWM输出值加上转向PD输出值,利用小车车轮的差速进行转向。
串口通信

时钟标准是什么





 RI是接受的一个标志位
RI是接受的一个标志位





 一个是接收的SBUF,一个是发送的SBUF
一个是接收的SBUF,一个是发送的SBUF
直流电机驱动

 停电时用来吸收剩余感性原件电流的二极管
停电时用来吸收剩余感性原件电流的二极管
编码器
PID,位置式PID
直立环,速度环
转向环,不是








#include "encoder.h"//编码器函数
/**************************************************************************
函数功能:总体来说,我们先要开启总线时钟,然后用三个函数,非别是1.时钟初始化函数2.GPIO端口初始化函数3.配置输入捕获函数,也就是编码器相关的函数
**************************************************************************/
void Encoder_Init_TIM2(void)//编码器初始化函数,形式参数写void做一个强调
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure; //定义一个结构体变量成员
TIM_ICInitTypeDef TIM_ICInitStructure; //定义一个结构体变量成员
GPIO_InitTypeDef GPIO_InitStructure; //定义一个结构体变量成员
////
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM2, ENABLE);//使能定时器2的时钟,因为全部GPIO都是挂载到APB2总线上的,这是开启总线的,通用定时器,挂载到HB1上的
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOA, ENABLE);//使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0|GPIO_Pin_1;//端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOA, &GPIO_InitStructure); //根据设定参数初始化GPIOA,根据设定参数初始化GPIOA.8,引用函数,第一个是GPIOc,初始化GPIOA外设,第二个是结构体变量名
//前面加上取地址的符号,这里使用的是地址传递
////不配置速度是因为编码器是读取,不是输出,,,,,Note: TIM_TimeBaseStructInit 这个用于初始化结构体
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);//这是对定时器进行初始化,Note: TIM_TimeBaseStructInit 这个用于初始化结构体,最好加上,防止有其他异常
TIM_TimeBaseStructure.TIM_Prescaler = 0x00; // 4.分频系数,预分频器,这里就是0,因为不分频
TIM_TimeBaseStructure.TIM_Period = 65535; //3.设定计数器自动重装值, //不可大于65535 因为F103的定时器是16位的。
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//1.选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;////2.TIM向上计数,计数模式
TIM_TimeBaseInit(TIM2, &TIM_TimeBaseStructure);
/////////////////////////////////////////////////////////////////////////////////////////
TIM_EncoderInterfaceConfig(TIM2, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3、、这是编码器特有的,编码器配置函数,第一个参数是定时器,第二个参数是模式3,为什么是模式3啊,第三个参数是上升沿,两个都是上升沿
///////////////////////////////////////怎么输入捕获初始化就设置了一个滤波系数,边沿检测和捕获通道都没设置呢?
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;//这里只有一个滤波器,滤波器是设置10就可以了,ic只有滤波器有效,其他都用不上
//////////////////////////////////////////////////
TIM_ICInit(TIM2, &TIM_ICInitStructure);
TIM_ClearFlag(TIM2, TIM_FLAG_Update);//清除TIM的更新标志位,计数更新之后会拉高,然后要清除一下
TIM_ITConfig(TIM2, TIM_IT_Update, ENABLE);//配置什么中断类型,当然是溢出更新
//Reset counter
TIM_SetCounter(TIM2,0);//把0给这个定时器
TIM_Cmd(TIM2, ENABLE); //开定时器
}
/**************************************************************************
函数功能:把TIM4初始化为编码器接口模式
入口参数:无
返回 值:无
**************************************************************************/
void Encoder_Init_TIM4(void)
{
TIM_TimeBaseInitTypeDef TIM_TimeBaseStructure;
TIM_ICInitTypeDef TIM_ICInitStructure;
GPIO_InitTypeDef GPIO_InitStructure;
RCC_APB1PeriphClockCmd(RCC_APB1Periph_TIM4, ENABLE);//使能定时器4的时钟
RCC_APB2PeriphClockCmd(RCC_APB2Periph_GPIOB, ENABLE);//使能PB端口时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_6|GPIO_Pin_7;//端口配置
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN_FLOATING; //浮空输入
GPIO_Init(GPIOB, &GPIO_InitStructure); //根据设定参数初始化GPIOB
TIM_TimeBaseStructInit(&TIM_TimeBaseStructure);
TIM_TimeBaseStructure.TIM_Prescaler = 0x00; // 预分频器
TIM_TimeBaseStructure.TIM_Period = 65535; //设定计数器自动重装值
TIM_TimeBaseStructure.TIM_ClockDivision = TIM_CKD_DIV1;//选择时钟分频:不分频
TIM_TimeBaseStructure.TIM_CounterMode = TIM_CounterMode_Up;////TIM向上计数
TIM_TimeBaseInit(TIM4, &TIM_TimeBaseStructure);
TIM_EncoderInterfaceConfig(TIM4, TIM_EncoderMode_TI12, TIM_ICPolarity_Rising, TIM_ICPolarity_Rising);//使用编码器模式3
TIM_ICStructInit(&TIM_ICInitStructure);
TIM_ICInitStructure.TIM_ICFilter = 10;
TIM_ICInit(TIM4, &TIM_ICInitStructure);
TIM_ClearFlag(TIM4, TIM_FLAG_Update);//清除TIM的更新标志位
TIM_ITConfig(TIM4, TIM_IT_Update, ENABLE);
//Reset counter
TIM_SetCounter(TIM4,0);
TIM_Cmd(TIM4, ENABLE);
}
/**************************************************************************
函数功能:单位时间读取编码器计数
入口参数:定时器
返回 值:速度值
**************************************************************************/
int Read_Encoder(u8 TIMX)//编码器读取速度,这里如果用int进行强制类型转换会报错
{
int point; //读取定时器的计数值,然后再清0
switch(TIMX)
{//所以换成这个库函数,这结构体成员不会
case 2: point= TIM_GetCounter(TIM2);TIM_SetCounter(TIM2,0); break;
case 4: point= TIM_GetCounter(TIM4);TIM_SetCounter(TIM2,0); break;
default: point=0;
}
return point;//因为getcounter返回的是uint16,这个是什么,这个是短整型函数,而我们之前对函数定义的是int,所以可能会出错。所以我们要进行一次强制类型转换
}
/**************************************************************************
函数功能:TIM4中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM4_IRQHandler(void)
{
if(TIM4->SR&0X0001)//溢出中断
{
}
TIM4->SR&=~(1<<0);//清除中断标志位
}
/**************************************************************************
函数功能:TIM2中断服务函数
入口参数:无
返回 值:无
**************************************************************************/
void TIM2_IRQHandler(void)
{
if(TIM2->SR&0X0001)//溢出中断
{
}
TIM2->SR&=~(1<<0);//清除中断标志位
}
void TIM4_IRQHandler(void)//中断标志位清除
{
if(TIM4->SR&0X0001)//溢出中断
TIM4->SR&=~(1<<0);//清除中断标志位
}





评论前必须登录!
注册