 网硕互联帮助中心
网硕互联帮助中心iRMB倒置残差块注意力机制简介
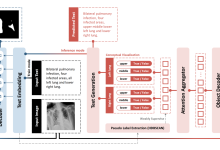
iRMB(Inverted Residual Mobile Block)的框架原理,是一种结合轻量级CNN和注意力机制的方法,用于改进移动设备上的目标检测模型。IRMB通过倒置残差块和元移动块实现高效信息处理,同时保持模型轻量化。本文中提出一个新的主干网络EMO,主要思想是将轻量级的CNN架构与基于注意力的模型结构相结合。
目录
1. 简介
2. iRMB主要思想
3. iRMB结构
原始论文:https://arxiv.org/pdf/2301.01146
代码地址:https://github.com/zhangzjn/EMO
1. 简介
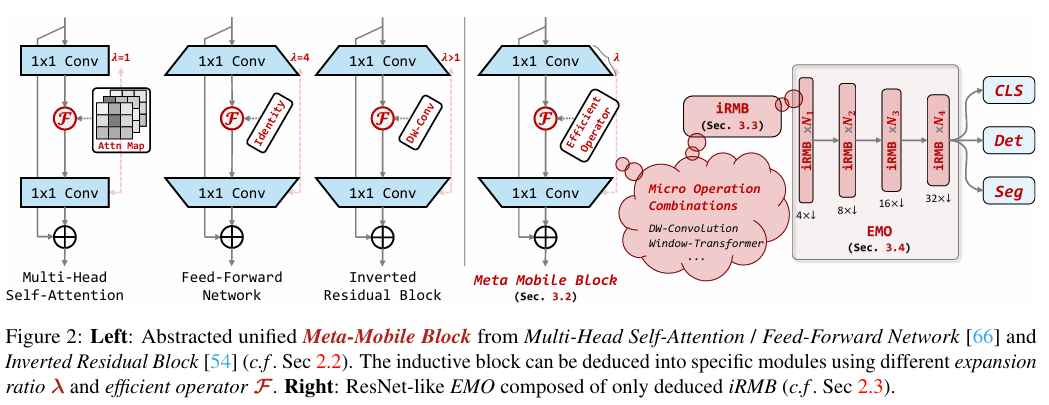
倒置残差块(IRB)作为轻量级CNN的基础设施,在基于注意力的研究中尚未有对应的部分。本文从统一的视角重新考虑了基于高效IRB和Transformer有效组件的轻量级基础设施,将基于CNN的IRB扩展到基于注意力的模型,并抽象出一个残差的元移动块(MMB)用于轻量级模型设计。遵循简单但有效的设计准则,本文推导出了现代化的倒置残差移动块(IRMB),并以此构建了类似ResNet的高效模型(EMO)用于下游任务。
2. iRMB主要思想
iRMB(Inverted Residual Mobile Block)的主要思想是将轻量级的CNN架构与基于注意力的模型结构相结合(优点类似于ACmix),以创建高效的移动网络。Irmb通过重新考虑导致残差(IRB)和Transformer的有效组件,实现了一种统一的视角,从而扩展了CNN的IRB到基于注意力的模型。Irmb的设计目标是在保持模型轻量级的同时,实现对计算资源的有效利用和高准确率。这一方法通过在下游任务上的广泛实验得到验证,展示出其在轻量级模型领域的优越性能。
iRMB的主要创新点在于以下三个点:
结合CNN的轻量级特征和Transformer的动态模型能力,创新提出了iRMB结构,适用于移动设备上的密集预测任务
使用倒置残差块设计,扩展了传统CNN的IRB到基于注意力的模型,增强了模型处理长距离信息的能力
提出了元移动块(Meta-Mobile Block),通过不同的扩展比率和高效操作符,实现了模型的模块化设计,使得模型更加灵活和高效
3. IRMB结构
iRMB结构的主要创新点是它结合了卷积神经网络的轻量级特性和Transformer模型的动态处理能力。这种结构特别适用于移动设备上的密集预测任务,因为它旨在计算能力有限的环境中提供高效的性能。IRMB通过其倒置残差设计改进了信息流的处理,允许在保持模型轻量的同时捕捉和利用长距离依赖,这对于图像分类,对象检测和语义分割等任务至关重要。这种设计使得模型在资源受限的设备上也能够高效运行,同时保持或提高预测准确性。
4.iRMB模块代码实现
import math
import torch
import torch.nn as nn
import torch.nn.functional as F
from functools import partial
from einops import rearrange
from timm.models._efficientnet_blocks import SqueezeExcite
from timm.models.layers import DropPath
__all__ = ['iRMB', 'C2PSA_iRMB', 'C3k2_iRMB']
inplace = True # 全局变量
class LayerNorm2d(nn.Module):
def __init__(self, normalized_shape, eps=1e-6, elementwise_affine=True):
super().__init__()
self.norm = nn.LayerNorm(normalized_shape, eps, elementwise_affine)
def forward(self, x):
x = rearrange(x, 'b c h w -> b h w c').contiguous()
x = self.norm(x)
x = rearrange(x, 'b h w c -> b c h w').contiguous()
return x
def get_norm(norm_layer='in_1d'):
eps = 1e-6
norm_dict = {
'none': nn.Identity,
'in_1d': partial(nn.InstanceNorm1d, eps=eps),
'in_2d': partial(nn.InstanceNorm2d, eps=eps),
'in_3d': partial(nn.InstanceNorm3d, eps=eps),
'bn_1d': partial(nn.BatchNorm1d, eps=eps),
'bn_2d': partial(nn.BatchNorm2d, eps=eps),
# 'bn_2d': partial(nn.SyncBatchNorm, eps=eps),
'bn_3d': partial(nn.BatchNorm3d, eps=eps),
'gn': partial(nn.GroupNorm, eps=eps),
'ln_1d': partial(nn.LayerNorm, eps=eps),
'ln_2d': partial(LayerNorm2d, eps=eps),
}
return norm_dict[norm_layer]
def get_act(act_layer='relu'):
act_dict = {
'none': nn.Identity,
'relu': nn.ReLU,
'relu6': nn.ReLU6,
'silu': nn.SiLU
}
return act_dict[act_layer]
class ConvNormAct(nn.Module):
def __init__(self, dim_in, dim_out, kernel_size, stride=1, dilation=1, groups=1, bias=False,
skip=False, norm_layer='bn_2d', act_layer='relu', inplace=True, drop_path_rate=0.):
super(ConvNormAct, self).__init__()
self.has_skip = skip and dim_in == dim_out
padding = math.ceil((kernel_size – stride) / 2)
self.conv = nn.Conv2d(dim_in, dim_out, kernel_size, stride, padding, dilation, groups, bias)
self.norm = get_norm(norm_layer)(dim_out)
self.act = get_act(act_layer)(inplace=inplace)
self.drop_path = DropPath(drop_path_rate) if drop_path_rate else nn.Identity()
def forward(self, x):
shortcut = x
x = self.conv(x)
x = self.norm(x)
x = self.act(x)
if self.has_skip:
x = self.drop_path(x) + shortcut
return x
class iRMB(nn.Module):
def __init__(self, dim_in, norm_in=True, has_skip=True, exp_ratio=1.0, norm_layer='bn_2d',
act_layer='relu', v_proj=True, dw_ks=3, stride=1, dilation=1, se_ratio=0.0, dim_head=8, window_size=7,
attn_s=True, qkv_bias=False, attn_drop=0., drop=0., drop_path=0., v_group=False, attn_pre=False):
super().__init__()
dim_out = dim_in
self.norm = get_norm(norm_layer)(dim_in) if norm_in else nn.Identity()
dim_mid = int(dim_in * exp_ratio)
self.has_skip = (dim_in == dim_out and stride == 1) and has_skip
self.attn_s = attn_s
if self.attn_s:
assert dim_in % dim_head == 0, 'dim should be divisible by num_heads'
self.dim_head = dim_head
self.window_size = window_size
self.num_head = dim_in // dim_head
self.scale = self.dim_head ** -0.5
self.attn_pre = attn_pre
self.qk = ConvNormAct(dim_in, int(dim_in * 2), kernel_size=1, bias=qkv_bias, norm_layer='none',
act_layer='none')
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, groups=self.num_head if v_group else 1, bias=qkv_bias,
norm_layer='none', act_layer=act_layer, inplace=inplace)
self.attn_drop = nn.Dropout(attn_drop)
else:
if v_proj:
self.v = ConvNormAct(dim_in, dim_mid, kernel_size=1, bias=qkv_bias, norm_layer='none',
act_layer=act_layer, inplace=inplace)
else:
self.v = nn.Identity()
self.conv_local = ConvNormAct(dim_mid, dim_mid, kernel_size=dw_ks, stride=stride, dilation=dilation,
groups=dim_mid, norm_layer='bn_2d', act_layer='silu', inplace=inplace)
self.se = SqueezeExcite(dim_mid, rd_ratio=se_ratio, act_layer=get_act(act_layer)) if se_ratio > 0.0 else nn.Identity()
self.proj_drop = nn.Dropout(drop)
self.proj = ConvNormAct(dim_mid, dim_out, kernel_size=1, norm_layer='none', act_layer='none', inplace=inplace)
self.drop_path = DropPath(drop_path) if drop_path else nn.Identity()
def forward(self, x):
shortcut = x
x = self.norm(x)
B, C, H, W = x.shape
if self.attn_s:
# padding
if self.window_size <= 0:
window_size_W, window_size_H = W, H
else:
window_size_W, window_size_H = self.window_size, self.window_size
pad_l, pad_t = 0, 0
pad_r = (window_size_W – W % window_size_W) % window_size_W
pad_b = (window_size_H – H % window_size_H) % window_size_H
x = F.pad(x, (pad_l, pad_r, pad_t, pad_b, 0, 0,))
n1, n2 = (H + pad_b) // window_size_H, (W + pad_r) // window_size_W
x = rearrange(x, 'b c (h1 n1) (w1 n2) -> (b n1 n2) c h1 w1', n1=n1, n2=n2).contiguous()
# attention
b, c, h, w = x.shape
qk = self.qk(x)
qk = rearrange(qk, 'b (qk heads dim_head) h w -> qk b heads (h w) dim_head', qk=2, heads=self.num_head,
dim_head=self.dim_head).contiguous()
q, k = qk[0], qk[1]
attn_spa = (q @ k.transpose(-2, -1)) * self.scale
attn_spa = attn_spa.softmax(dim=-1)
attn_spa = self.attn_drop(attn_spa)
if self.attn_pre:
x = rearrange(x, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ x
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h,
w=w).contiguous()
x_spa = self.v(x_spa)
else:
v = self.v(x)
v = rearrange(v, 'b (heads dim_head) h w -> b heads (h w) dim_head', heads=self.num_head).contiguous()
x_spa = attn_spa @ v
x_spa = rearrange(x_spa, 'b heads (h w) dim_head -> b (heads dim_head) h w', heads=self.num_head, h=h,
w=w).contiguous()
# unpadding
x = rearrange(x_spa, '(b n1 n2) c h1 w1 -> b c (h1 n1) (w1 n2)', n1=n1, n2=n2).contiguous()
if pad_r > 0 or pad_b > 0:
x = x[:, :, :H, :W].contiguous()
else:
x = self.v(x)
x = x + self.se(self.conv_local(x)) if self.has_skip else self.se(self.conv_local(x))
x = self.proj_drop(x)
x = self.proj(x)
x = (shortcut + self.drop_path(x)) if self.has_skip else x
return x
def autopad(k, p=None, d=1): # kernel, padding, dilation
"""Pad to 'same' shape outputs."""
if d > 1:
k = d * (k – 1) + 1 if isinstance(k, int) else [d * (x – 1) + 1 for x in k] # actual kernel-size
if p is None:
p = k // 2 if isinstance(k, int) else [x // 2 for x in k] # auto-pad
return p
class Conv(nn.Module):
"""Standard convolution with args(ch_in, ch_out, kernel, stride, padding, groups, dilation, activation)."""
default_act = nn.SiLU() # default activation
def __init__(self, c1, c2, k=1, s=1, p=None, g=1, d=1, act=True):
"""Initialize Conv layer with given arguments including activation."""
super().__init__()
self.conv = nn.Conv2d(c1, c2, k, s, autopad(k, p, d), groups=g, dilation=d, bias=False)
self.bn = nn.BatchNorm2d(c2)
self.act = self.default_act if act is True else act if isinstance(act, nn.Module) else nn.Identity()
def forward(self, x):
"""Apply convolution, batch normalization and activation to input tensor."""
return self.act(self.bn(self.conv(x)))
def forward_fuse(self, x):
"""Perform transposed convolution of 2D data."""
return self.act(self.conv(x))
class PSABlock(nn.Module):
"""
PSABlock class implementing a Position-Sensitive Attention block for neural networks.
This class encapsulates the functionality for applying multi-head attention and feed-forward neural network layers
with optional shortcut connections.
Attributes:
attn (Attention): Multi-head attention module.
ffn (nn.Sequential): Feed-forward neural network module.
add (bool): Flag indicating whether to add shortcut connections.
Methods:
forward: Performs a forward pass through the PSABlock, applying attention and feed-forward layers.
Examples:
Create a PSABlock and perform a forward pass
>>> psablock = PSABlock(c=128, attn_ratio=0.5, num_heads=4, shortcut=True)
>>> input_tensor = torch.randn(1, 128, 32, 32)
>>> output_tensor = psablock(input_tensor)
"""
def __init__(self, c, attn_ratio=0.5, num_heads=4, shortcut=True) -> None:
"""Initializes the PSABlock with attention and feed-forward layers for enhanced feature extraction."""
super().__init__()
self.attn = iRMB(c)
self.ffn = nn.Sequential(Conv(c, c * 2, 1), Conv(c * 2, c, 1, act=False))
self.add = shortcut
def forward(self, x):
"""Executes a forward pass through PSABlock, applying attention and feed-forward layers to the input tensor."""
x = x + self.attn(x) if self.add else self.attn(x)
x = x + self.ffn(x) if self.add else self.ffn(x)
return x
class C2PSA_iRMB(nn.Module):
"""
C2PSA module with attention mechanism for enhanced feature extraction and processing.
This module implements a convolutional block with attention mechanisms to enhance feature extraction and processing
capabilities. It includes a series of PSABlock modules for self-attention and feed-forward operations.
Attributes:
c (int): Number of hidden channels.
cv1 (Conv): 1×1 convolution layer to reduce the number of input channels to 2*c.
cv2 (Conv): 1×1 convolution layer to reduce the number of output channels to c.
m (nn.Sequential): Sequential container of PSABlock modules for attention and feed-forward operations.
Methods:
forward: Performs a forward pass through the C2PSA module, applying attention and feed-forward operations.
Notes:
This module essentially is the same as PSA module, but refactored to allow stacking more PSABlock modules.
Examples:
>>> c2psa = C2PSA(c1=256, c2=256, n=3, e=0.5)
>>> input_tensor = torch.randn(1, 256, 64, 64)
>>> output_tensor = c2psa(input_tensor)
"""
def __init__(self, c1, c2, n=1, e=0.5):
"""Initializes the C2PSA module with specified input/output channels, number of layers, and expansion ratio."""
super().__init__()
assert c1 == c2
self.c = int(c1 * e)
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv(2 * self.c, c1, 1)
self.m = nn.Sequential(*(PSABlock(self.c, attn_ratio=0.5, num_heads=self.c // 64) for _ in range(n)))
def forward(self, x):
"""Processes the input tensor 'x' through a series of PSA blocks and returns the transformed tensor."""
a, b = self.cv1(x).split((self.c, self.c), dim=1)
b = self.m(b)
return self.cv2(torch.cat((a, b), 1))
class Bottleneck(nn.Module):
"""Standard bottleneck."""
def __init__(self, c1, c2, shortcut=True, g=1, k=(3, 3), e=0.5):
"""Initializes a standard bottleneck module with optional shortcut connection and configurable parameters."""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, k[0], 1)
self.cv2 = Conv(c_, c2, k[1], 1, g=g)
self.add = shortcut and c1 == c2
def forward(self, x):
"""Applies the YOLO FPN to input data."""
return x + self.cv2(self.cv1(x)) if self.add else self.cv2(self.cv1(x))
class C3(nn.Module):
"""CSP Bottleneck with 3 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5):
"""Initialize the CSP Bottleneck with given channels, number, shortcut, groups, and expansion values."""
super().__init__()
c_ = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, c_, 1, 1)
self.cv2 = Conv(c1, c_, 1, 1)
self.cv3 = Conv(2 * c_, c2, 1) # optional act=FReLU(c2)
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=((1, 1), (3, 3)), e=1.0) for _ in range(n)))
def forward(self, x):
"""Forward pass through the CSP bottleneck with 2 convolutions."""
return self.cv3(torch.cat((self.m(self.cv1(x)), self.cv2(x)), 1))
class C3k(C3):
"""C3k is a CSP bottleneck module with customizable kernel sizes for feature extraction in neural networks."""
def __init__(self, c1, c2, n=1, shortcut=True, g=1, e=0.5, k=3):
"""Initializes the C3k module with specified channels, number of layers, and configurations."""
super().__init__(c1, c2, n, shortcut, g, e)
c_ = int(c2 * e) # hidden channels
# self.m = nn.Sequential(*(RepBottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
self.m = nn.Sequential(*(Bottleneck(c_, c_, shortcut, g, k=(k, k), e=1.0) for _ in range(n)))
class C2f(nn.Module):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5):
"""Initializes a CSP bottleneck with 2 convolutions and n Bottleneck blocks for faster processing."""
super().__init__()
self.c = int(c2 * e) # hidden channels
self.cv1 = Conv(c1, 2 * self.c, 1, 1)
self.cv2 = Conv((2 + n) * self.c, c2, 1) # optional act=FReLU(c2)
self.m = nn.ModuleList(Bottleneck(self.c, self.c, shortcut, g, k=((3, 3), (3, 3)), e=1.0) for _ in range(n))
def forward(self, x):
"""Forward pass through C2f layer."""
y = list(self.cv1(x).chunk(2, 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
def forward_split(self, x):
"""Forward pass using split() instead of chunk()."""
y = list(self.cv1(x).split((self.c, self.c), 1))
y.extend(m(y[-1]) for m in self.m)
return self.cv2(torch.cat(y, 1))
class C3k2(C2f):
"""Faster Implementation of CSP Bottleneck with 2 convolutions."""
def __init__(self, c1, c2, n=1, c3k=False, e=0.5, g=1, shortcut=True):
"""Initializes the C3k2 module, a faster CSP Bottleneck with 2 convolutions and optional C3k blocks."""
super().__init__(c1, c2, n, shortcut, g, e)
self.m = nn.ModuleList(
C3k(self.c, self.c, 2, shortcut, g) if c3k else Bottleneck(self.c, self.c, shortcut, g) for _ in range(n)
)
class C3k_iRMB(C3k):
def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5, k=3):
super().__init__(c1, c2, n, shortcut, g, e, k)
c_ = int(c2 * e) # hidden channels
self.m = nn.Sequential(*(iRMB(c_, c_) for _ in range(n)))
class C3k2_iRMB(C3k2):
def __init__(self, c1, c2, n=1, c3k=False, e=0.5, g=1, shortcut=True):
super().__init__(c1, c2, n, c3k, e, g, shortcut)
self.m = nn.ModuleList(C3k_iRMB(self.c, self.c, 2, shortcut, g) if c3k else iRMB(self.c, self.c) for _ in range(n))
5.具体改进操骤
5.1 在ultralytics/nn/modules下新建iRMB.py文件
在iRMB.py文件里添加给出的iRMB代码
添加完iRMB代码后,在ultralytics/nn/modules/__init__.py文件中引用
from .iRMB import *
然后,在ultralytics/nn/tasks.py里引用
from .modules import *
5.2 在ultralytics/nn/tasks.py修改
在tasks.py找到parse_model函数(可以ctrl+f 直接搜索parse_model位置)添加:
elif m in {iRMB}:
c2 = ch[f]
args = [c2, *args]
6.创建YAML配置文件
此处以YOLOv11代码为例,创建YOLO11_iRMB.yaml
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
– [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
– [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
– [-1, 2, C3k2, [256, False, 0.25]]
– [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
– [-1, 2, C3k2, [512, False, 0.25]]
– [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
– [-1, 2, C3k2, [512, True]]
– [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
– [-1, 2, C3k2, [1024, True]]
– [-1, 1, SPPF, [1024, 5]] # 9
– [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 6], 1, Concat, [1]] # cat backbone P4
– [-1, 2, C3k2, [512, False]] # 13
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 4], 1, Concat, [1]] # cat backbone P3
– [-1, 2, C3k2, [256, False]] # 16
– [-1, 1, iRMB, []] # 17 小目标检测层增加注意力机制
– [-1, 1, Conv, [256, 3, 2]]
– [[-1, 13], 1, Concat, [1]] # cat head P4
– [-1, 2, C3k2, [512, False]] # 20 (P4/16-medium)
– [-1, 1, iRMB, []] # 21 中目标检测层增加注意力机制
– [-1, 1, Conv, [512, 3, 2]]
– [[-1, 10], 1, Concat, [1]] # cat head P5
– [-1, 2, C3k2, [1024, True]] # 24
– [-1, 1, iRMB, []] # 25 大目标检测层增加注意力机制
– [[17, 21, 25], 1, Detect, [nc]] # Detect(P3, P4, P5)
以上是一种改进方法,也可以在C3k2模块、C2PSA模块等处进行改进,构建新的的C3k2_iRMB、C2PSA_iRMB模块。
YOLO11_C2PSA_iRMB.yaml
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
– [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
– [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
– [-1, 2, C3k2, [256, False, 0.25]]
– [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
– [-1, 2, C3k2, [512, False, 0.25]]
– [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
– [-1, 2, C3k2, [512, True]]
– [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
– [-1, 2, C3k2, [1024, True]]
– [-1, 1, SPPF, [1024, 5]] # 9
– [-1, 2, C2PSA_iRMB, [1024]] # 10
# YOLO11n head
head:
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 6], 1, Concat, [1]] # cat backbone P4
– [-1, 2, C3k2, [512, False]] # 13
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 4], 1, Concat, [1]] # cat backbone P3
– [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
– [-1, 1, Conv, [256, 3, 2]]
– [[-1, 13], 1, Concat, [1]] # cat head P4
– [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
– [-1, 1, Conv, [512, 3, 2]]
– [[-1, 10], 1, Concat, [1]] # cat head P5
– [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
– [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
YOLO11_C3k2_iRMB.yaml
# Ultralytics YOLO 🚀, AGPL-3.0 license
# YOLO11 object detection model with P3-P5 outputs. For Usage examples see https://docs.ultralytics.com/tasks/detect
# Parameters
nc: 80 # number of classes
scales: # model compound scaling constants, i.e. 'model=yolo11n.yaml' will call yolo11.yaml with scale 'n'
# [depth, width, max_channels]
n: [0.50, 0.25, 1024] # summary: 319 layers, 2624080 parameters, 2624064 gradients, 6.6 GFLOPs
s: [0.50, 0.50, 1024] # summary: 319 layers, 9458752 parameters, 9458736 gradients, 21.7 GFLOPs
m: [0.50, 1.00, 512] # summary: 409 layers, 20114688 parameters, 20114672 gradients, 68.5 GFLOPs
l: [1.00, 1.00, 512] # summary: 631 layers, 25372160 parameters, 25372144 gradients, 87.6 GFLOPs
x: [1.00, 1.50, 512] # summary: 631 layers, 56966176 parameters, 56966160 gradients, 196.0 GFLOPs
# YOLO11n backbone
backbone:
# [from, repeats, module, args]
– [-1, 1, Conv, [64, 3, 2]] # 0-P1/2
– [-1, 1, Conv, [128, 3, 2]] # 1-P2/4
– [-1, 2, C3k2_iRMB, [256, False, 0.25]]
– [-1, 1, Conv, [256, 3, 2]] # 3-P3/8
– [-1, 2, C3k2_iRMB, [512, False, 0.25]]
– [-1, 1, Conv, [512, 3, 2]] # 5-P4/16
– [-1, 2, C3k2_iRMB, [512, True]]
– [-1, 1, Conv, [1024, 3, 2]] # 7-P5/32
– [-1, 2, C3k2_iRMB, [1024, True]]
– [-1, 1, SPPF, [1024, 5]] # 9
– [-1, 2, C2PSA, [1024]] # 10
# YOLO11n head
head:
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 6], 1, Concat, [1]] # cat backbone P4
– [-1, 2, C3k2, [512, False]] # 13
– [-1, 1, nn.Upsample, [None, 2, "nearest"]]
– [[-1, 4], 1, Concat, [1]] # cat backbone P3
– [-1, 2, C3k2, [256, False]] # 16 (P3/8-small)
– [-1, 1, Conv, [256, 3, 2]]
– [[-1, 13], 1, Concat, [1]] # cat head P4
– [-1, 2, C3k2, [512, False]] # 19 (P4/16-medium)
– [-1, 1, Conv, [512, 3, 2]]
– [[-1, 10], 1, Concat, [1]] # cat head P5
– [-1, 2, C3k2, [1024, True]] # 22 (P5/32-large)
– [[16, 19, 22], 1, Detect, [nc]] # Detect(P3, P4, P5)
7. 模型训练
import warnings
warnings.filterwarnings('ignore')
from ultralytics import YOLO
if __name__ == '__main__':
model = YOLO('YOLO11_iRMB.yaml')
# model.load('yolo11n.pt') # loading pretrain weights
model.train(data='dataset/data.yaml',
cache=False,
imgsz=640,
epochs=300,
batch=32,
close_mosaic=0,
workers=4, # Windows下出现莫名其妙卡主的情况可以尝试把workers设置为0
# device='0',
optimizer='SGD', # using SGD
# patience=0, # set 0 to close earlystop.
# resume=True, # 断点续训,YOLO初始化时选择last.pt
# amp=False, # close amp
# fraction=0.2,
project='runs/train',
name='exp',
)





评论前必须登录!
注册