 网硕互联帮助中心
网硕互联帮助中心永磁同步电机控制系列课程:
第一篇 永磁同步电机控制-认识电机
第二篇 永磁同步电机控制-电机的分类
第三篇 永磁同步电机控制-硬件基础知识
第四篇 永磁同步电机控制-软件基础知识
第五篇 永磁同步电机控制-数学模型
第六篇 永磁同步电机控制-控制方法
第七篇 永磁同步电机控制-磁场定向控制FOC
第八篇 永磁同步电机控制-MTPA、MTPV
第九篇 永磁同步电机控制-弱磁控制
第十篇 永磁同步电机控制-SVPWM
第十一篇 永磁同步电机控制-位置环、转速环、电流环PI控制
第十二篇 永磁同步电机控制-PI整定
第十三篇 永磁同步电机控制-死区补偿
第十四篇 永磁同步电机控制-大总结 ———————————————————————————————————————————
永磁同步电机(Permanent Magnet Synchronous Motor, PMSM)的数学模型是分析和设计其控制系统的基础。
一、永磁同步电机的分类
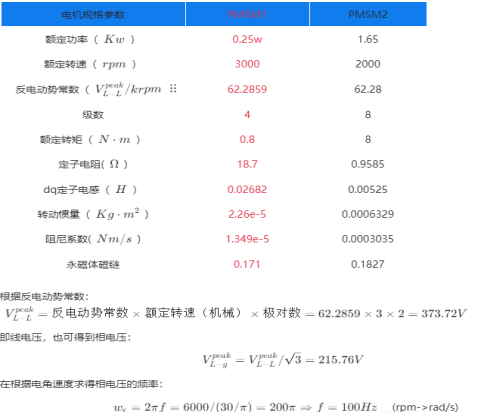
1.表贴式永磁同步电机 (Surface PMSM, SPMSM),通常 L_d ≈ L_q。 2.内置式永磁同步电机 (Interior PMSM, IPMSM),通常 L_d < L_q,这会产生磁阻转矩。 3.永磁同步电机的关键参数: R_s: 定子电阻; L_d, L_q: d轴和q轴同步电感; ψ_f: 永磁体磁链; P: 极对数; J: 转动惯量; B: 摩擦系数
二、核心数学模型
1.理想假设: 忽略磁路饱和: 假设电机铁芯的磁导率为无穷大,磁路不饱和。 忽略铁芯损耗: 忽略定子铁芯中的涡流损耗和磁滞损耗。 忽略谐波效应: 假设反电动势和磁链为正弦波(理想化)。 对称三相绕组: 定子三相绕组在空间上对称分布,阻抗相同。 永磁体等效: 永磁体产生的磁场在气隙中正弦分布,可等效为一个恒定励磁电流源产生的磁场。
2.ABC三相静止坐标系
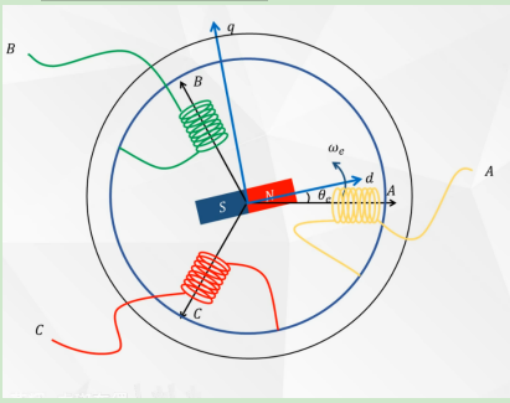
三相静止坐标系经典方程式

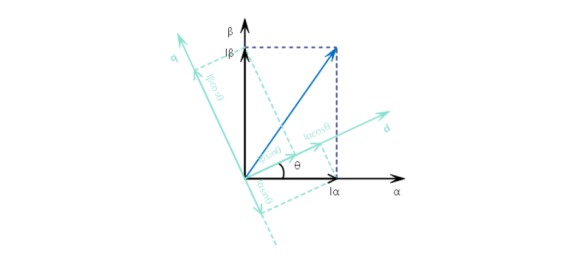
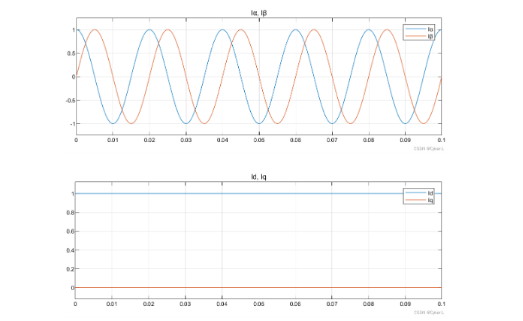
3、α-β两相静止坐标系 三相静止坐标系 通过Clark变换到 两相静止坐标系。
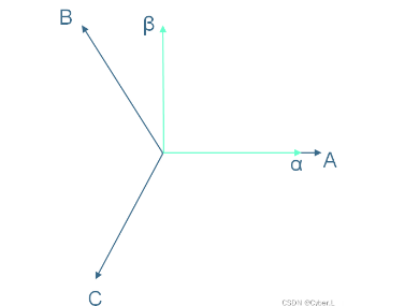
两相静止坐标系经典方程式

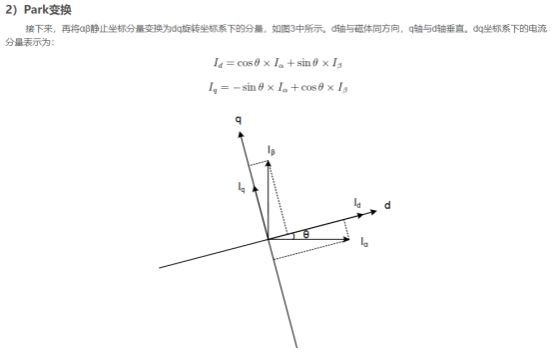
4、D-Q两相旋转坐标系 两相静止坐标系 通过Park变换到 两相旋转坐标系。
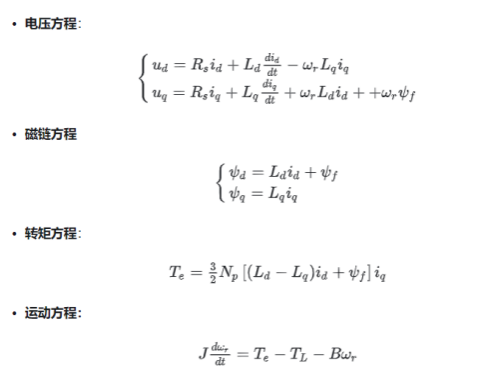
两相旋转坐标系经典方程式
三、坐标变换

ABC -> DQ
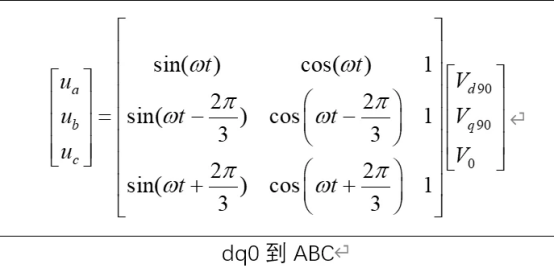
DQ -> ABC
四、等幅值变换 与 等功率变换
电机控制(尤其是永磁同步电机PMSM的矢量控制)中,等幅值变换 (Amplitude-Invariant Transformation) 和 等功率变换 (Power-Invariant Transformation) 是两种常用的坐标变换规范。它们主要用于 克拉克变换 (Clark Transformation / αβ Transformation),将三相静止坐标系 (abc) 变换到两相静止坐标系 (αβ)。两者的核心区别在于变换后矢量的幅值是否等于原物理量的幅值,以及变换前后系统的功率是否守恒。
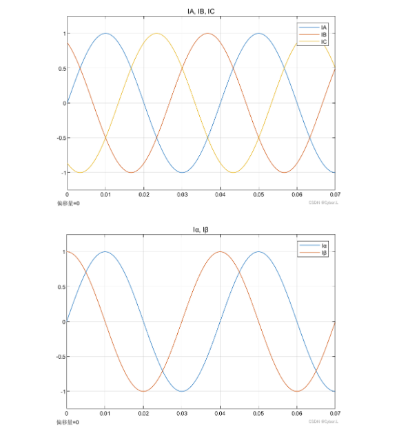
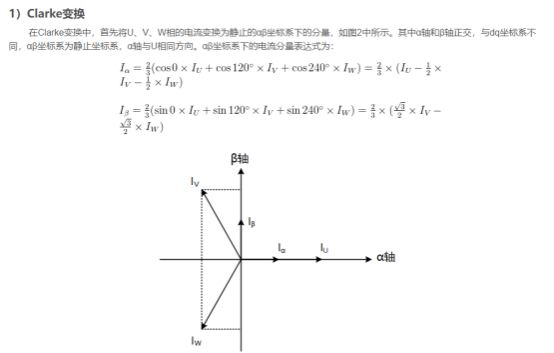
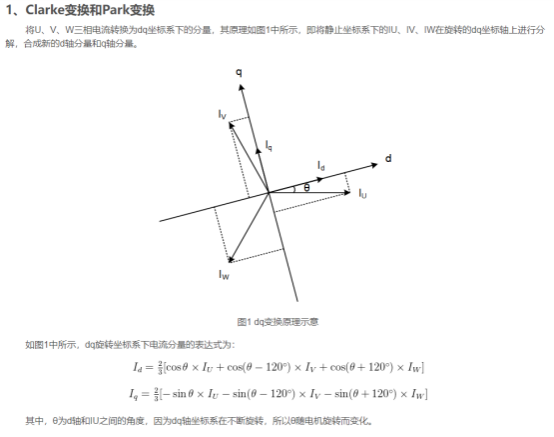
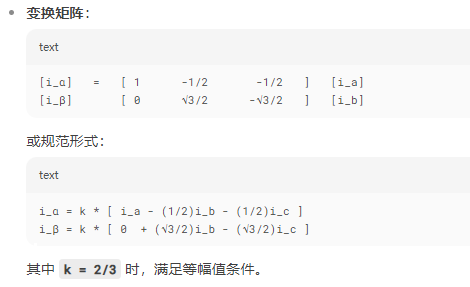
1. 克拉克变换 (Clark Transformation / αβ Transformation) 克拉克变换将三相变量(电压、电流、磁链)从互差120°的 abc 坐标系变换到相互垂直的 αβ 两相静止坐标系。 设三相平衡变量为: i_a = I_m * cos(θ) i_b = I_m * cos(θ – 2π/3) i_c = I_m * cos(θ + 2π/3) 目标是得到两相静止坐标系中的 i_α 和 i_β。
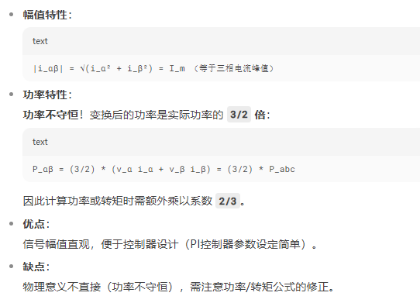
2.等幅值变换 (Amplitude-Invariant) 核心思想:变换后 αβ 坐标系中的矢量 幅值 等于原三相物理量的 峰值 I_m。
3.等功率变换 (Power-Invariant) 核心思想:变换前后 瞬时功率保持不变。
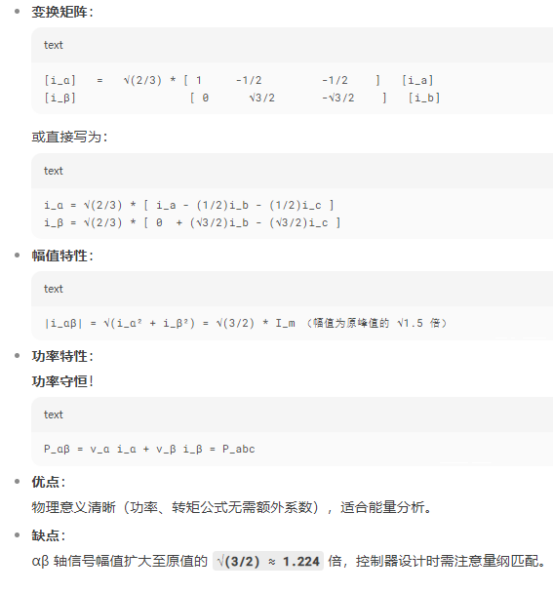
4.两种变换的对比总结

5. 在PMSM矢量控制中的选择 (1)等幅值变换更常见于实际控制器: 因其信号幅值直观,便于电流环PI参数整定(例如:电流指令幅值直接等于电机允许的最大电流峰值)。 (2)等功率变换更常见于理论分析: 因其功率守恒特性,推导转矩方程和能量模型时无需额外系数,公式更简洁。
6.关键注意事项 (1)派克变换 (Park Transformation) 通常与克拉克变换保持一致。若克拉克用等幅值,则派克变换矩阵也需用 2/3;若用等功率,则派克用 √(2/3)。整个控制链必须统一! (2)无论选择哪种变换,只要在整个控制系统(电流采样→克拉克→派克→反变换)中保持一致即可。若使用现成的库(如TI的MotorWare),需明确其采用的变换类型。 (3)理解这两种变换的差异,是避免在电机控制算法调试中出现系数混乱的关键!


评论前必须登录!
注册