 网硕互联帮助中心
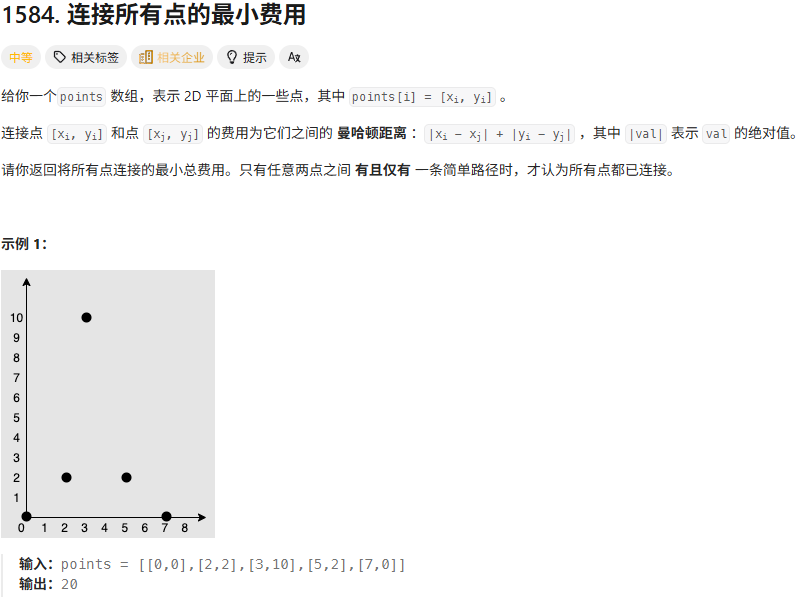
网硕互联帮助中心Practice Day eight:Leetcode T1584
上一次,我们使用了Prim算法解决了最小生成树的问题,事实上Kruskal算法也是解决最小生成树的一个有效方法。我们可不能厚此薄彼,只讲解Prim算法而对Kruskal算法置之不理。
现在,我们先来讲解Kruskal算法的基本原理:
1 获取所有节点连成边的数值,如果数值为0,直接终止程序,输出结果。否则,进入下一步操作。
2 以从大到小,好吧,其实从小到大也行,总之,给他们排序
3 选取其中最小的边
4 判断这条边被实装后,是否会形成多个连通分量,用人话说,就是是否会成环
5 成环:那就滚蛋,我们要最小生成树,成环显然不符合我们的标准。
不成环:你过关。实装这条边。
6 判断此时所有节点是否已然被链接。若已然完全链接,终止程序。若未链接全部节点,则循环步骤3,4,5,6
完成对Kruskal算法的初步了解后,我们来看看题目要求:得到最小生成树。
没什么好说的,就用Kruksal算法。
但是题目这个图,比较有意思的是,他是以坐标的形式给出位置的,并不是直接把一个连通图的权重告诉你。
我想说的是,这样一来,我们的操作空间就变大了。为什么这么说?因为我们获得了一个新的信息:角度。
若是单纯给出一个无向链接图给你,你只能知道各个节点之间的权重,你只有这个信息。
但是以坐标形式给出,你就可以获知:节点之间的权重、权重间的夹角
来思考一下,这个夹角,他确实可以帮助我们简化代码吗?
更多时候,增加一个影响因素,他往往会让事情变得更复杂,这里也不列外。
但是,可以让我们的程序更加快速!哈哈哈哈!
来看看这是怎么一回事吧!
虽然Kruskal算法的核心是以边为基础展开的,所以,我们可以很轻易的知道,当边越多,越复杂的时候,算法实现时间会变得很长。对于这类图,我们管他叫稠密图。
对于稠密图,我们更喜欢用Prim算法进行解决。因为Prim算法是以点为基础的,边的多与寡,实际对算法的实现的时间影响并不大。
事实上,Kruskal更适合解决边更少的稀疏图,他在稀疏图上解决问题的时间远比Prim算法好得多。区分稠密图和稀疏图的临界条件,就是边的数目接近n^2/2。
这时你可能察觉出问题所在了:题目只给了坐标,左边两两相连可是有n(n-1)/2条边,这毫无疑问是稠密图,Kruskal算法完全不适用于这个题目。
没有Prim大人的力量,我们该如何战胜稠密图?!
作者淡然一笑,一把抓住稠密图,顷刻炼化!
我就是非得要用Kruskal,为什么非要算法适应题目?我完全可以改造题目,让他变得适应算法!
这时候就需要用到强大的几何武器了!
在一个平面三角形中:
古语有曰:大角对大边。
简而言之,就是角越大,边就越大。这个可以通过余弦定理严格证明。反正你高中学过了,对吧?
构成一个三角形,我们需要三个顶点,怎么排列都可以。
我们知道,若想连同三个点,实际上我们只需选择三条边中的其中两条即可。
若是需要最小生成树,则肯定不能选其中最大的这条边。
这样,我们就通过几何关系,减少了可以选择的边,稠密图,渐渐变成了稀疏图。
很明了了,我们可以通过【角度】来选择边。
怎么应用他?这好像很麻烦欸?夹角是相对而言的,也就是说,如果我要使用夹角这个信息,我不能孤立的使用它,我们必须有两条边才能使用他。
就算知道了边长,我们仍需通过三角形的余弦定理才能知道角度,md,这不是没事找事吗,我要知道长度了,还要什么角度。
所以角度的应用方式不是这样的,我们如果能找到一个特殊的角度,让他和边对应起来,那该有多好。边,实际上又是坐标的二级产物,而题目又是以坐标的形式给出,要求我们计算的是曼哈顿距离,而不是实际意义上的边长,那我们为什么不直接以曼哈顿距离的形式来等效处理这个边长呢?毕竟边长的大小实际上与曼哈顿距离(实际应描述为横向距离和纵向距离)是一 一对应的。
答案已经很明显了!聪明的你已经想到,这个角度,他就是45°,只有他,才可以很轻易的把横纵坐标给简单联系起来,因为这是一个可以通过数值简单二分类的模型,若横向距离与纵向距离相等,那就是45°,若不等,就不是45°,完全不需要进行别的处理。
先借力扣官方的图用一下
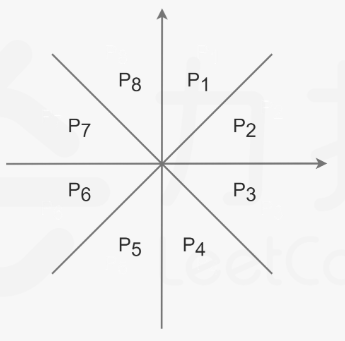
再结合我们前面的理论,我们可以得知,45°对应的角一定不会是最大角,也就是,这个角所对边一定不是最大边,这就强迫我们必须要在简单计算就知道了,不再过多描述。
可以看到,整个平面,被我们分为了八个部分。现在,我们就可以分区域进行处理了。
1 以选中的节点作为原点,实现这个非常简单,只需要把两个节点的坐标相减即可,这相当于平移坐标系,现在,我们管这个处于原点坐标叫做a
2 我们先以P1区为例,我们再随便取一个坐标,也许没这么幸运,一下就取到了P1区,我管他叫b
3 我们如何判定,b他确实在P1区间里面呢?再进一步,这个P1区到底是怎么划分的呢?我们知道,P1区不过是a点的引申,所以对于区域划分的问题,我们需要从a点入手。
4 我们知道,对于45°,其斜率为K=1,也就是说,对于恰好处于点a的45°方向的点(注意,这里描述的不是处于P1区域的点),应该满足Xz-Xa>0 这是为了保证b在a的右半区间
Yz-Xz=Ya-Xa 这是因为处于a的P1区域的点,应该满足方程式Y-X=C(C是一个常数,表示对以原点出发的45°的校正数值,毕竟不管怎么说,我们的45°仍然以真正的原点及其坐标系为标准)
5 那么,很清晰了,若是点b处于P1区域,就应该满足Xb-Xa>0,以及Yb-Xb>C
6 在完成区域的判别之后,我们就需要进行最短边的判断。我们知道,对于处于P1区域的点而言,曼哈顿距离可以被表示为D=(Xz-Xa)+(Yz-Ya)=(Xz+Yz)-(Xa+Ya),有意思的是,Xa+Ya在此处实际上是个定值,在处理的过程中,会改变的只有Xz+Yz。也就是说:(Xz+Yz)越大,曼哈顿距离就越大
7 那么,对于曼哈顿距离的判断,就简化为了对所选节点(Xz+Yz)值的判断,这个值可不会因为参考系的改变而改变,减少了我们大量的存储工作与存储空间,并且这个是每一个节点独有的值
8 记录处于P1区域的所有值,通过二叉搜索树(BIT),选出其中的最小值,放入队列,保留他。
9 那么剩下的P2,P3,P4也是同样的操作,记录下本区间的最小值。为什么不把左侧也一起计算了,为什么只计算右侧?因为这样就会造成重复。来想一想吧!我们是需要对所有节点都进行这个操作的!这意味着什么?!
10 意味着,处于最左侧的节点一定会被选中!只要他被选中,就意味着除了他之外的节点就一定会与他产生联系,因为我们的计算流程就是这么设计的,由于这是一个无向图,描述为a与b连接,与描述为b与a连接,实际上地位是等价的,a的右侧,实际上就是b的左侧,只不过主体不同,描述方式不同而已:我的边,就是你的边
11 所以,我们只需要计算一侧,就足以计算所有节点之间的联系了,如果全方位进行计算,就会浪费计算资源,没有这个必要
12 一个节点,最多引申出八条边与其他节点连接,因为每个区域,只有一条最短边。这当然不是什么二级结论,这只是我们由区域划分而得出来的数字。
13 欸,有人可能会说:你怎么证明这八条边肯定能连接所有节点?其实你可以这样想:其实,这就是每个节点自发的找离自己最近的节点。虽然这有违Kruskal算法的思想,反而与Prim算法的思想更接近,但实际上,筛查的时候我们利用的是Kruskal算法,所以他是当之无愧的Kruskal算法。
13 我们完成了对边的减少后 ,这完全就是一个稀疏图了。把这些筛选后的边扔进队列中,然后为他们排序。
14 取出最小边,判断它是否成环,这一点,我们可以使用并查集来实现,只需要判断其是否属于同一个父节点就可以了。
15 成环:舍弃,选取下一条边长继续工作
不成环:选取他,将其放入图中,然后记录边长
16 循环以上步骤14与步骤15。
17 当无边可选时,程序终止
流程已然大致梳理了一遍,下面,就是程序的构建了。
并查集(Disjoint-Set)
比较抱歉的是,我并没有在前几天的每日一练中发布有关并查集的内容,所以,在此处卡住的小伙伴们可以先去B站查询相关内容,几分钟就可以搞定。
简单来说,并查集就是查询每一个节点归属的一种树状结构。
学习了并查集后,我们来构建一个并查集,来帮助我们判断所选节点是否成环。
1 并查集有四个要素:节点个数、每个节点的秩(树的高度)、父节点、子节点
2 为了更快一些,也许我们的元素并不是只查询这么一次,我们希望后续的查询中能快一些。想想看吧,这个结构树是怎么构成的?比较坏的情况是一级一级向上查询,那我希望在这次一查询后,以后就不要这样这么慢的查询了,所以我直接把这一级节点挂到父节点上面,这样,我在下次查询后,只需要再向上查一级,我就知道本节点是从属于这个父节点。人们给这种操作取了一个动人的名字,路径压缩。
3 上面说的是已经连接好的情况,如果,是新连接的呢?这就意味着,合并。合并也是有讲究的,哪两个节点合并?以什么形式合并?
4 第一,合并通常是父节点之间进行合并,如果你想把一个节点合并到另一个节点上,请务必找到这两个节点的父节点,然后再合并父节点
5 第二,就合并的方式而言, 通常有两种,不过他们统称为“按秩合并”,第一种是按树高合并,也就是哪棵树更高,矮的那棵树的父节点就连接到高的那颗树的父节点上。不过这会产生一些幻觉。因为涉及到路径压缩的话,进行路径压缩后,树的实际高度可能会变矮,导致会出现两棵树等高,或者高一些的树合并到矮一些的树上面,不过无伤大雅,这个法子还是很好用的,并不会因为些许幻觉产生不稳定性。
6 为了解决这个幻觉,我们有第二种办法,按节点个数合并,谁节点更多,谁就做爸爸,因为儿子的个数不会因路径压缩而发生改变。
以下是代码实现:
class DisjointSetUnion {
private:
vector<int> f, rank;
int n;
public:
DisjointSetUnion(int _n) {
n = _n;
rank.resize(n, 1);
f.resize(n);
for (int i = 0; i < n; i++) {
f[i] = i;
}
}
int find(int j) {
return f[j] == j ? j : f[j] = find(f[j]);
}
int unionSet(int j, int k) {
int fj = find(j), fk = find(k);
if (fj == fk) {
return false;
}
if (rank[fj] < rank[fk]) {
swap(fj, fk);
}
rank[fj] += rank[fk];
f[fj] = fj;
return true;
}
};
其中,
find()函数就是路径压缩,以迭代的方式完成。
unionSet()函数就是检查是否成环,以及按秩合并。
接着,我们来构建二叉索引树(Binary Indexed Tree)的类,又名树状数组,没学过的小伙伴可以看看这个视频https://www.bilibili.com/video/BV1pE41197Qj/?spm_id_from=333.1387.homepage.video_card.click&vd_source=f8b81fa5a70ab21de75192e5c7ec720c https://www.bilibili.com/video/BV1pE41197Qj/?spm_id_from=333.1387.homepage.video_card.click&vd_source=f8b81fa5a70ab21de75192e5c7ec720c
https://www.bilibili.com/video/BV1pE41197Qj/?spm_id_from=333.1387.homepage.video_card.click&vd_source=f8b81fa5a70ab21de75192e5c7ec720c
好吧,我承认有些操之过急。构建他的原因是:快速找到分隔的四块P1,2,3,4中,每个区域的最小边
1 首先,构成树状数组的要素有三个:
①用于记录数值的数组:这里是记录每个节点本身的特征值,这里的特征值是一个统称。先给这个数组命个名吧,既然他叫树状数组,那我们就管他叫tree。对于tree而言,实际上,它记录了两种信息。看看他的形态tree[pos]=val
我们发现,它可以在两个地方记录信息:数组索引pos,存储的值val。
这分别用于干什么呢?
对于数组索引pos,用来划定区域,也就是我们的P1,2,3,4
而存储的值val,则是用来判断最短边
我们仍旧用P1进行举例。
我们来看看pos是怎么来的,又是怎么运作,才拥有了划分区域的能力
回想以下划分区域的条件:Xb-Xa>0,以及Yb-Xb>C=Ya-Xa
首先,我们需要确保取到的点,好吧,其实我们需要取两个点。如何确保你在以其中一个点为基准点时,另一个点一定会在其右侧,也就是Xb-Xa>0?很简单,【排序】。只要按照X值的大小排序,我们先取X值最小的点作为基准点,那么即便另外一个点是随便取的,依然可以Xb-Xa>0。
对于排序,实现方法是构建一个可以同时存储x,y值的对象,你可能会想到每日一练8的键值对,但这里我们使用结构体更合适一些,因为我们还有别的信息需要存储,比如——索引。所以键值对是不合适的。
struct Pos {
int id, x, y;
};
我们有诸多节点,显然一个结构体是不够的,所以我们需要一个存放结构体的容器。
vector<Pos> pos
有了这个,我们就可以进行排序的操作了
我们知道,C++的std::sort函数默认使用“<"运算符来比较两个元素的大小,对于自定义结构体Pos而言,当我们重载了运算符"<"后,sort就会调用这个重载版本来决定元素的排列顺序。
对于Pos而言,我们关注的是他的X值,因为我们要保证所选节点在基准节点右侧。但情况实际上还有另一种情况,也是唯一的一种情况:所选两点X值相同。这显然也需要一种排序方式,因为他是真实存在的情况,我们无法忽略他。所以,我们也要为他来涉及一个比较方式,简单起见,仍旧比较Ya<Yb即可。我们在结构体中补充一条运算符重载函数,以便sort函数可以调用他。
struct Pos {
int id, x, y;
bool operator<(const Pos& a) const { return x == a.x ? y < a.y : x < a.x; }
};
这里需要注意的是,三目运算符“ ?:”形成的是一个整体,并不是直接return x;而是通过大小的比较返回一个bool值。
然后进行排序
sort(pos.begin(), pos.end());
现在,数组pos以X值从小到大的形式排列好了。
完成了第一个条件的判定后,就需要进行第二个条件的判断,涉及到节点的特征值Yb-Xb
对于这样的计算,我们可以复用结构体Pos,计算每一个节点的特征值,对此,我们同样需要一个容器来存储这些计算的值。由于这是一个整数定值,我们把类型设为int
vector<int> a(n);
然后遍历vector<Pos> pos中的所有元素,将计算值记录到vector<int> a(n)中
for (int i = 0; i < n; i++) {
a[i] = pos[i].y – pos[i].x;
}
有时会出现一些节点Y-X相同的情况,这意味着这些节点都处于基准节点的同一个区域内,比如都处于基准元素的P1区域内。
这个现象除了告诉我们他们处于同一个区域,还告诉我们他会让程序检索时间变长,这是我们不愿看到的,比较好的办法是让每一个特征值Y-X变得独特,成为索引一样的存在,但我们又不希望改变数组a,因为数组a的索引代表他是不同节点产生的特征值。
所以我们另设一个数组b,专门用于存放没有重复的特征值Y-X,让其成为分界线一样的存在,通过检索b的索引,我们就能知道坐标处于哪一个区域。由于我们不知道重复值的个数,先暂且设容器大小为n
vector<int> b(n);
当然,合理起见,我们应该与a一同处理,也就是在上一条程序的for循环加上数组b的处理
for (int i = 0; i < n; i++) {
a[i] = pos[i].y – pos[i].x;
b[i] = pos[i].y – pos[i].x;
}
然后,对数组b进行上述操作,让每个特征值独立,并使之可以成为被合理检索的存在。
为了可以轻易检索他,我们先把数组b进行排序,这样,我们就可以通过下标的形式进行区域划分。同时,这也是为了适配去重时erase函数的使用,因为erase函数只能删去特定区域的数字。
sort(b.begin(), b.end());
然后进行去重。
b.erase(unique(b.begin(), b.end()), b.end());
首先是利用unique函数把数组b所有重复的元素移到队列末尾,然后返回一个指向第一个重复元素的迭代器。之后,erase函数大手发力,抹除两个迭代器之间的重复元素。现在,数组b有了一个好听的名字——【映射表】。当然,你喜欢管他叫,【字典】,也是可以被接受的。
说了这么多,不要忘记初心,我们是要解释pos这个数组tree的索引是怎么来的
为了把索引名称和数组名pos区分,我们把计算用的索引名称叫poss
int poss = lower_bound(b.begin(), b.end(), a[i]) – b.begin() + 1;
通过lower_bound函数,他会返回一个在数组b中与数组a数值相等时的迭代器,当然,我们需要把他处理为数组索引,迭代器当然不能成为索引。但数组b是一个vector数组,他的内容是连续存储的,那么迭代器之间相减,得到一个差值,这就是数组b此时的索引了。但这还不够,因为二叉索引树的标号是从【1】开始的,而数组b是从【0】开始的,不进行标号对齐的话,会出现
lowbit(0)无意义的问题,所以,我们需要为数组b的索引
lower_bound(b.begin(), b.end(), a[i]) – b.begin()
进行加1的处理,以便对齐二叉索引树的标号。
这就是pos的来源了,如何使用它,我们后面会继续讲解
接下来讲解的是数组tree中存储的val,这又是怎么来的
文章有些太长了,我们重温一下上面的内容
在完成区域的判别之后,我们就需要进行最短边的判断。我们知道,对于处于P1区域的点而言,曼哈顿距离可以被表示为D=(Xz-Xa)+(Yz-Ya)=(Xz+Yz)-(Xa+Ya),有意思的是,Xa+Ya在此处实际上是个定值,在处理的过程中,会改变的只有Xz+Yz。也就是说:(Xz+Yz)越大,曼哈顿距离就越大
pos这个索引,事实上就完成了区块的划分,所以,tree存储的值应该是处于P1区块的节点的曼哈顿距离的魔改值(Xz+Yz),对于这个值的使用,我们后面会进行讲解
②用于记录索引的数组:通过相同的编号来记录索引。事实上,这个数组有两个索引,我们需要分清楚一些。我们设这个数组为idRec。对于这个idRec,进行查找时,有idRec[pos] = id。其中pos的来源,在①中已经解释过。现在,我们来解释“id”存储了什么值。
id,就是当前数组tree所使用的poss索引,在数组pos中的编号
pos[i]——>a[i]——>b[?]——>poss——>tree[poss]
也就是说,id=i,保留这个信息,是为了之后得胜最小边时,计算曼哈顿距离的依据
③构造BIT实例花费的数组大小:我们把这个传入的东西叫做n。
对于n,应该与数组tree含有的元素个数一致,这样,才能精确构建数组tree的大小,避免不必要的浪费,也是为了防止存储空间不足而越界。所以有
int num = b.size();
这里的num与n不是一个东西,由于构建的数组往往从0开始,所以实际上数组tree和数组idRec都要比实际存储元素总量大一位,以符合二叉索引树的应用规则,[0]号数组不存储东西,只是用来加塞。也就是说,n=num+1
对于num而言,这个值越大,说明P1区域划分的越精细,但同时也意味着搜索效率的降低。
拥有所有构建二叉索引树的要素之后,我们就开始构建二叉索引树
BIT(int _n) {
n = _n;
tree.resize(n, INT_MAX);
idRec.resize(n, -1);
}
我们在初始化时,应该把数组tree的每一个元素设置为最大,给予一个初始的比较值,因为我们的tree总是存储最小的(Xz+Yz),所以初始值,我们要设为无穷大,虽然无法在计算机实现无穷大,不过我们可以用int整形可以表达的最大值来表示无穷。
对于数组idRec而言,为什么要把初始元素设置为-1,这并没有什么特殊的,只是因为正数和零都需要被使用为编号索引,所以我们只能在负数中随机选择一个数,表示此时尚未存在该区域的tree被关联。
此时二叉索引树初始化完成,接下来,我们来实现二叉索引树的功能。
哈哈,首先,是二叉索引树最关键的搜查组件,lowbit()
int lowbit(int k) { return k & (-k); }
位与运算符&首先会把十进制的k转化为二进制,然后-k变成k取补码,也就是k按位取反,然后加一。接着&运算符就会比对k与-k之间的数字,若同一位次都是1,则取1,否则取0。这样,我们就可以得到二进制的k最右侧的1了。
这样设计的目的是什么?
来看看树状数组的形状,这里,我们借用一下B站up主鹤翔万里的图,以下是链接
https://www.bilibili.com/video/BV1pE41197Qj/?spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=f8b81fa5a70ab21de75192e5c7ec720chttps://www.bilibili.com/video/BV1pE41197Qj/?spm_id_from=333.1007.top_right_bar_window_history.content.click&vd_source=f8b81fa5a70ab21de75192e5c7ec720c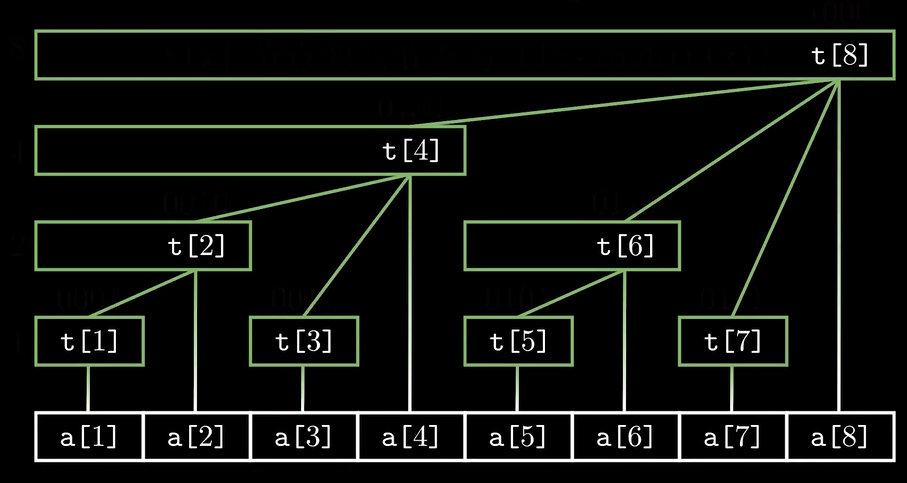
对于最底下的白色数组而言(注意这里的数组a不是我们编写的,只是图片的一个范例),他记录的是我们处理过后的数组b[ ],也就是在P1区域某个范围内的最小值。现在,我们希望在之后可以更加快速的检索由数组b生成的poss对应的最小值,所以,我们构建了另外一个数组 t [ ]来存放某一区间(这里的区间指的是由poss生成的索引区间,因为poss的生成是有序的,所以区间也是有序的)内的最小值,在我们的代码里,数组tree[ ]等效于上面的数组 t [ ]。
我们来举例理解他吧:t[2]存储的是a[1]~a[2]里比较小的那个值,t[4]存储的是a[1]~a[4]中最小的那个值,t[8]存储的是a[1]~a[8]里最小的那个值。
这种可以通过父区间快速查找我们设定的规则(本题是最小值,当然,你可以自己DIY存储各种数据的树状数组)的树状结构,就是我们的树状数组了。
也就是说,只要查询对应的父节点,就可以获悉其管理的子节点的核心信息。在查询之前,树状数组是已经经过一次比对,才被被构建出来的,树状数组实质上只是为了方便后续查询的结构。
树状数组的核心思想是用父节点管理若干子节点的信息,而 lowbit 就是用来确定父节点与子节点的管辖关系的关键。
①lowbit可以帮助我们获得数组 t [ ]目前管理的元素个数,以及计算被管理元素的索引
例如:
- lowbit(8) = 8 → t[8] 管理 a[1]~a[8](长度 8)
- lowbit(4) = 4 → t[4] 管理 a[1]~a[4](长度 4)
- lowbit(6) = 2 → t[6] 管理 a[5]~a[6](长度 2)
- lowbit(3) = 1 → t[3] 管理 a[3](长度 1)
②lowbit可以作为步长进行迁越,找到父节点,或子节点
- 子节点 → 父节点:子节点的下标 i 加上 lowbit(i),会跳转到父节点(管理更大区间)。
- 父节点 → 子节点:父节点的下标 i 减去 lowbit(i),会跳转到子节点(管理更小、更细分的区间)。
-
示例:修改 a[3](二进制 0011)
- lowbit(3) = 1(二进制 0001),因此:
- 第一步:更新 t[3](管理 a[3])→ i = 3
- 第二步:i += lowbit(3) → 3 + 1 = 4 → 更新 t[4](管理 a[1]~a[4],包含 a[3])
- 第三步:i += lowbit(4) → 4 + 4 = 8 → 更新 t[8](管理 a[1]~a[8],包含 a[3])
- 第四步:i += lowbit(8) → 8 + 8 = 16(超出数组长度 n=8,停止)
现在,理解了基本原理后,我们来构建update组件,与query组件混合使用。
update用于为树状数组tree插入数据,也就是上面树状数组的图片中的数组 t [ ]。
①tree是数组b的映射,以 int poss = lower_bound(b.begin(), b.end(), a[i]) – b.begin() + 1;的方式
②但我们仍需从数组a下手,因为数组a的索引与数组pos的索引是一一对应的,数组tree只是存储中间量的工具,我们仍然得通过准确的节点pos[i]来计算曼哈顿距离。
③tree存储的值val是特征值X+Y,也就是我们需要传入pos节点本身的x,y信息
这样一来,update就需要传入三个数据:poss、i、对应的真实节点pos[i].x与pos[i].y的信息
他的原型设置为
void update(int poss, int val, int id)
反正要记录特征值,一不做二不休,直接在传入参数的时候就计算
update(poss, pos[i].x + pos[i].y, i)
然后开始构建内部逻辑
由于一开始,tree所有元素被初始化为无穷大,所以,当我们按pos[i]插入时,他一定是整个数组tree中最小的值,则数组必然会更新。
在往后的操作中,也是需要比对数值,如果新插入的数值比原来的大,就不管他,跳过,不更新,如果插入的数值更小,就按步长往下走,更新沿途所有节点的值,直到节点小于0。
往下走的原因是,我们希望可以这么设计。因为这样可以节省更新节点的时间。可以得知,数组tree最后一个元素,必然是整个数组最小的元素,这一点,可以由上面的树状数组图很轻易的获知。
所以假设我们从X值大到小,也就是从最末尾的编号开始更新,他就会从父节点开始更新,不需要遍历所有子节点。在后续的流程中也是一样的道理。这样一来,遍历修改值的次数明显比从X值从小到大的次数要小,节省了不少时间。
那么,我们的步长就设置为自减,而不是我们常用的自增。
然后记录我们当前最小值的节点poss身份证编号i,存储到idRec,接着poss向下遍历,直至poss<=0,退出循环,因为我们的编号是从1开始的。
void update(int poss, int val, int id) {
while (pos > 0) {
if (tree[poss] > val) {
tree[poss] = val;
idRec[poss] = id;
}
poss -= lowbit(poss);
}
由于最顶层的数组一定是最小值,我们也只关心最小值,往下是如何实现的,其实我们并不需要对其过多关注
现在,我们需要另一个组件query用于查询特定区域最小的数值。因为update只提供插入功能,没有提供查询功能。
对于查询功能,我们需要传入当前poss值,找到当前区域最小的边长。值得一提的是,树状数组中的元素并不会最终都链接到同一个父结点上,一个树状数组最终可以有多个父节点。
幸运的是,我们可以通过poss这个索引可以通过自增作为桥梁,来跨进不同父节点所属的树,进行最小值查询。这时候,就符合二叉索引树的逻辑,自下向上,自左往右的搜索不同的树,利用lowbit步长跨越的功能,我们也能很快的检索到树状数组中的最小值。
既然是检索最小值,那么我们就应该存在返回最小值的功能,不过由于我们存储的是特征值val,到时我们要判断是否成环还要用到每个节点自身的独立性,否则,我们就可以直接使用tree存储的值来计算曼哈顿距离。所以此处,我们返回原始节点的索引。
这里涉及到一个问题,就是最小值能否是由不同的点计算出相同的答案?答案是不可能。因为进入树的节点都是经过Y-X的筛选的,不可能在Y-X比基准节点小的情况下,Y+X的值与基准节点计算的相同。
然后我们就需要考虑检索不到值的情况了。对于检索不到值的情况,我们也应有返回值,为了与节点编号有所区分,我们把无返回值设为-1。
为了可以找到最小值,且存在比对的对象,我们设用于比较的值minval初始时是无穷大。
int query(int pos) {
int minval = INT_MAX;
int j = -1;
while (pos < n) {
if (minval > tree[pos]) {
minval = tree[pos];
j = idRec[pos];
}
pos += lowbit(pos);
}
return j;
}
现在,我们已经完成了对二叉索引树的全部构建,来一张全家福吧。
class BIT {
public:
vector<int> tree, idRec;
int n;
BIT(int _n) {
n = _n;
tree.resize(n, INT_MAX);
idRec.resize(n, -1);
}
int lowbit(int k) { return k & (-k); }
void update(int pos, int val, int id) {
while (pos > 0) {
if (tree[pos] > val) {
tree[pos] = val;
idRec[pos] = id;
}
pos -= lowbit(pos);
}
}
int query(int pos) {
int minval = INT_MAX;
int j = -1;
while (pos < n) {
if (minval > tree[pos]) {
minval = tree[pos];
j = idRec[pos];
}
pos += lowbit(pos);
}
return j;
}
};
二叉索引树只是完成了对区域最小边的选择,我们需要一个另外一个组件,来利用二叉索引树构建边。
是的,到这里笔者已经写了12000字的思路了 ,才刚到边的构建。哈哈,不过寥寥一百多行的代码,居然有这么多门道。庞杂的思路被浓缩成精简的代码,真是让人着迷。
为了编写构造边的组件,我们需要另设一个函数,就管他叫build吧。
在进行build之前,我们需要知道保留的边的信息:
第一:构建他最主要的目的是知道边的长度
第二:我们不希望它成环,所以我们希望记录边的同时,可以同步记录构成它的两个节点的编号
第三:我们知道,后面会有容器存储边的信息,而且需要选取最小值。但存储了这么多信息的个体,需要一个主导元素来供给比较,这个主导元素就是曼哈顿长度。
基于上述要求,构建结构体是一个不错的选择,接着,为了满足比较的需求,我们需要重载运算符来供给后面的排序需要。
struct Edge {
int len, i, j;
Edge(int len, int i, int j) : len(len), i(i), j(j) {
}
bool operator<(const Edge& a) const {
return len < a.len;
}
};
这里需要注意的是,重载运算符前后都有一个const。
前面的const,是为了保证传入的参数不被修改
后面的const,是为了保证this指针所指的对象参数不被修改
既然完成了对边的构建,我们就需要有一个容器来存储生成的边
vector<Edge> edges;
对于build,既然它是构建边的函数,那他就应该包括我们构建二叉搜索树的所有操作,因为这本就是为他服务的。
我们整理一下思路吧:
①对所有节点pos按照X值由小到大排序
②设立两个数组a与b
③对b进行去重
④以b的大小为BIT构建实例
⑤进入循环,由编号从大到小为BIT更新最小值
⑥使用query搜查最小值
⑦若是搜查到最小值就计算曼哈顿距离,将其塞入数组edges中,供给Kruskal算法备选
⑧无论是否存在最小边,都以当前循环的编号使用update塞入新节点进BIT
⑨进入下一轮循环,重复⑤~⑧,直至所有元素被处理完成。
这里我们总是只考虑区域P1,所以这个函数应该还被别的函数所使用,这里我们只传入参数n来让下述操作正确构造数组即可,其他参数由调用build的函数来提供。
为什么要这么做?
因为在build函数中无论什么情况,都只有n,以及每个节点的pos[i].x与pos[i].y是不变的,且n是一个参数,不会影响程序运行速度。但若是每次n都传入pos的话,麻烦就大了。因为pos实际上是我们对传入的vector<vector<int>>& points的一种改造,如果每次使用pos,都要传入一次points数组进行赋值的话,程序就会变的奇慢无比。所以我们希望只对pos赋值一次就够了,后面就可以尽情的使用它,而不是每调用一次build就构造一次pos。
void build(int n) {
sort(pos.begin(), pos.end());
vector<int> a(n), b(n);
for (int i = 0; i < n; i++) {
a[i] = pos[i].y – pos[i].x;
b[i] = pos[i].y – pos[i].x;
}
sort(b.begin(), b.end());
b.erase(unique(b.begin(), b.end()), b.end());
int num = b.size();
BIT bit(num + 1);
for (int i = n – 1; i >= 0; i–) {
int poss = lower_bound(b.begin(), b.end(), a[i]) – b.begin() + 1;
int j = bit.query(poss);
if (j != -1) {
int dis = abs(pos[i].x – pos[j].x) + abs(pos[i].y – pos[j].y);
edges.emplace_back(dis, pos[i].id, pos[j].id);
}
bit.update(poss, pos[i].x + pos[i].y, i);
}
}
需要注意的是,曼哈顿距离是一个绝对值,所以需要用到abs()函数取绝对值
接下来,就只剩下最后一个组件了
由于我们以上操作,都默认是在P1区域进行的,而我们需要生成P1,P2,P3,P4四个区域的边,显然,我们需要一个函数来为我们达成这个目的,使之复用上面的build函数来完成四个区域所有边的生成,就叫它MST吧
我们以上操作,都是基于题目传入的数组和节点个数实现的。为了达成边生成的目的,这些信息也必不可少,所以除了传入的points数组之外,我们需要获取数组个数的参数
void MST(vector<vector<int>>& points, int n)
他没有返回值,因为他只是调用build函数生成边而已
首先,我们需要为build函数提供它需要的pos节点信息
pos.resize(n);
for (int i = 0; i < n; i++) {
pos[i].x = points[i][0];
pos[i].y = points[i][1];
pos[i].id = i;
}
构造对pos数组进行重构,使之大小为n,然后利用传入的二维数组赋值,将其表示为x,y,并赋予这些节点独特编号,以便我们使用并查集时可以探查是否成环,以及使用BIT时有检索的目标。
然后依次构建P1,P2,P3,P4区域的边
P1:直接调用build函数即可,因为我们默认就是设定P1为示例区域
build(n);
P2:既然build的默认处理方式是P1,那我们就把P2也化成P1区域的模样就好了,我们只需要对坐标进行一些变化,比如说:翻转
现在,X与Y都是正数,且P1区域是黏在Y轴上的,而P2是黏在X轴上的,且条件也是X与Y都是正数。
聪明的你已经想到了,我只需要交换X与Y的地位,就可以令P2区域像P1区域一样处理了
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
P3:我们知道,P3与P2在原来的坐标轴中是以X轴对称的,现在X与Y数值交换
本来应该是旋转X轴的操作,现在应该变成旋转Y轴,此时Y轴由pos[i].x表示,旋转它,即让其变为负的
for (int i = 0; i < n; i++) {
pos[i].x = -pos[i].x;
}
build(n);
P4:由于现在P3等效于P1,那么P4就等效为P2.想想以P1为基准时,对P2怎么操作的吧:交换X和Y的值。那么现在我们也要对P4进行同等操作,让他变成P1的形状。
build(n);
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
以下是完整的MST函数实现
void MST(vector<vector<int>>& points, int n) {
pos.resize(n);
for (int i = 0; i < n; i++) {
pos[i].x = points[i][0];
pos[i].y = points[i][1];
pos[i].id = i;
}
build(n);
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
for (int i = 0; i < n; i++) {
pos[i].x = -pos[i].x;
}
build(n);
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
}
我已经什么都不缺了
来构建题目的调用函数吧,他已经给了基本格式了
int minCostConnectPoints(vector<vector<int>>& points)
现在,我们需要按流程调用我们上面所有的组件
①获取元素个数n,这应该在调用函数之外进行,因为所有函数都用到了它,他必须是个全局变量
②生成所有可用的边,调用MST函数
③初始化并查集,调用DisjointSetUnion类的构造函数
④我们需要一个返回值,初始成本ret为0,然后一个用于计数的实例num,用于记录此时插入的节点个数,方便后续判断是否所有节点已经插入,然后可以终止程序。注意,num被初始化为1,因为每选用一条边,意味着纳入一个节点。虽然有时候选取的边链接的节点并不处于我们之前的父节点里面,形成两棵树,但它最后总是会成为一个整体的,所以初始为1是很合理的。
⑤把MST函数所有生成的边从小到大排序
⑥遍历整个edges,即存储最小边的数组
⑦利用并查集判断其是否成环,成环,并查集返回false,进行下一次循环
⑧不成环,累加当前边的长度ret,num计数加一
⑨判断num是否等于n,即是否所有点都已经加入,若是,终止程序,返回成本ret
⑩若所有节点仍未加入树中,循环⑥~⑨,直至程序终止,返回成本ret
这就是所有了
写的最长的一次,前面所有文章的字数加起来翻一倍都没有这一篇长。
最后,附上力扣官方的完整题解
作者:力扣官方题解
链接:https://leetcode.cn/problems/min-cost-to-connect-all-points/solutions/565801/lian-jie-suo-you-dian-de-zui-xiao-fei-yo-kcx7/
来源:力扣(LeetCode)
著作权归作者所有。商业转载请联系作者获得授权,非商业转载请注明出处。
class DisjointSetUnion {
private:
vector<int> f, rank;
int n;
public:
DisjointSetUnion(int _n) {
n = _n;
rank.resize(n, 1);
f.resize(n);
for (int i = 0; i < n; i++) {
f[i] = i;
}
}
int find(int x) {
return f[x] == x ? x : f[x] = find(f[x]);
}
int unionSet(int x, int y) {
int fx = find(x), fy = find(y);
if (fx == fy) {
return false;
}
if (rank[fx] < rank[fy]) {
swap(fx, fy);
}
rank[fx] += rank[fy];
f[fy] = fx;
return true;
}
};
class BIT {
public:
vector<int> tree, idRec;
int n;
BIT(int _n) {
n = _n;
tree.resize(n, INT_MAX);
idRec.resize(n, -1);
}
int lowbit(int k) {
return k & (-k);
}
void update(int pos, int val, int id) {
while (pos > 0) {
if (tree[pos] > val) {
tree[pos] = val;
idRec[pos] = id;
}
pos -= lowbit(pos);
}
}
int query(int pos) {
int minval = INT_MAX;
int j = -1;
while (pos < n) {
if (minval > tree[pos]) {
minval = tree[pos];
j = idRec[pos];
}
pos += lowbit(pos);
}
return j;
}
};
struct Edge {
int len, x, y;
Edge(int len, int x, int y) : len(len), x(x), y(y) {
}
bool operator<(const Edge& a) const {
return len < a.len;
}
};
struct Pos {
int id, x, y;
bool operator<(const Pos& a) const {
return x == a.x ? y < a.y : x < a.x;
}
};
class Solution {
public:
vector<Edge> edges;
vector<Pos> pos;
void build(int n) {
sort(pos.begin(), pos.end());
vector<int> a(n), b(n);
for (int i = 0; i < n; i++) {
a[i] = pos[i].y – pos[i].x;
b[i] = pos[i].y – pos[i].x;
}
sort(b.begin(), b.end());
b.erase(unique(b.begin(), b.end()), b.end());
int num = b.size();
BIT bit(num + 1);
for (int i = n – 1; i >= 0; i–) {
int poss = lower_bound(b.begin(), b.end(), a[i]) – b.begin() + 1;
int j = bit.query(poss);
if (j != -1) {
int dis = abs(pos[i].x – pos[j].x) + abs(pos[i].y – pos[j].y);
edges.emplace_back(dis, pos[i].id, pos[j].id);
}
bit.update(poss, pos[i].x + pos[i].y, i);
}
}
void solve(vector<vector<int>>& points, int n) {
pos.resize(n);
for (int i = 0; i < n; i++) {
pos[i].x = points[i][0];
pos[i].y = points[i][1];
pos[i].id = i;
}
build(n);
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
for (int i = 0; i < n; i++) {
pos[i].x = -pos[i].x;
}
build(n);
for (int i = 0; i < n; i++) {
swap(pos[i].x, pos[i].y);
}
build(n);
}
int minCostConnectPoints(vector<vector<int>>& points) {
int n = points.size();
solve(points, n);
DisjointSetUnion dsu(n);
sort(edges.begin(), edges.end());
int ret = 0, num = 1;
for (auto& [len, x, y] : edges) {
if (dsu.unionSet(x, y)) {
ret += len;
num++;
if (num == n) {
break;
}
}
}
return ret;
}
};
感谢各位阅读到此处,我们不日相见。



评论前必须登录!
注册