 网硕互联帮助中心
网硕互联帮助中心我来为您详细举例说明机器人、AGV/AMR、机器狗使用多奥梯控系统的完整乘梯流程,用一个具体的场景让您更清楚:
🏢 场景设定
某医院物流机器人需要从3楼药房运送药品到8楼病房
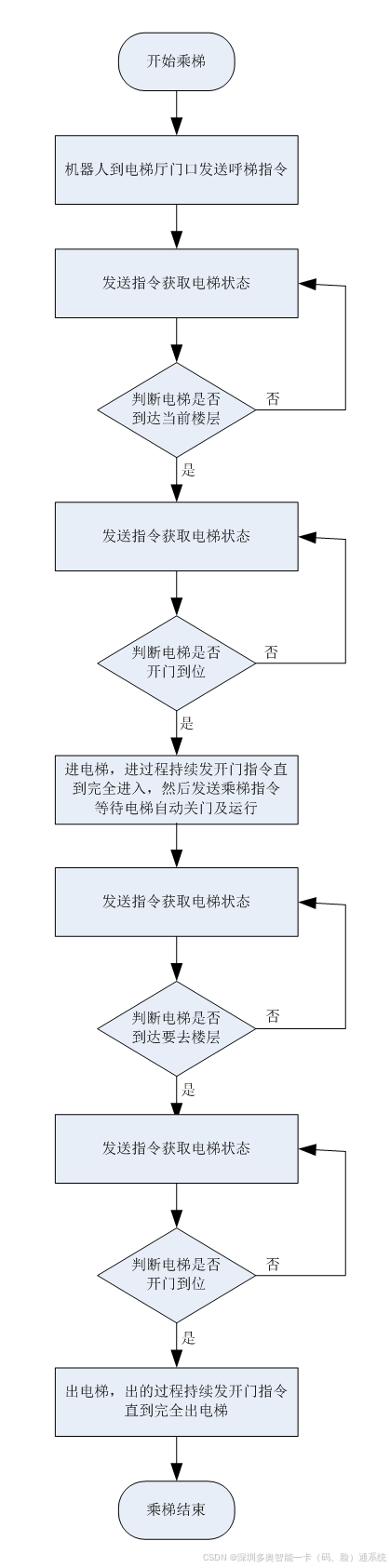
[空闲状态]
↓
[步骤1] 发送当前楼层呼梯命令
↓
[等待应答] 等待梯控响应
↓
[步骤2] 发送楼层查询命令(轮询)
↓
[判断] 当前楼层 = 目的楼层?
├─ 否 → 继续轮询查询
└─ 是 → 发送开门命令(每10-15秒重发一次)
↓
[步骤3] 实时监听电梯状态
↓
[判断] 电梯状态 = 开门?
├─ 否 → 继续监听 + 开门命令保活
└─ 是 → 执行进梯/出梯动作
↓
[判断] 是否到达最终目的楼层?
├─ 否 → [步骤4] 发送目的楼层呼梯命令
│ ↓
│ 返回[步骤3]监听到达
└─ 是 → [结束] 乘梯完成
执行顺序:
返回步骤3:监听电梯运行状态
确认到达:当当前楼层 == 目的楼层 且 门状态 == OPEN
执行出梯动作
如果还有下一楼层,执行步骤4发送新楼层命令
重复直到到达最终目的楼层
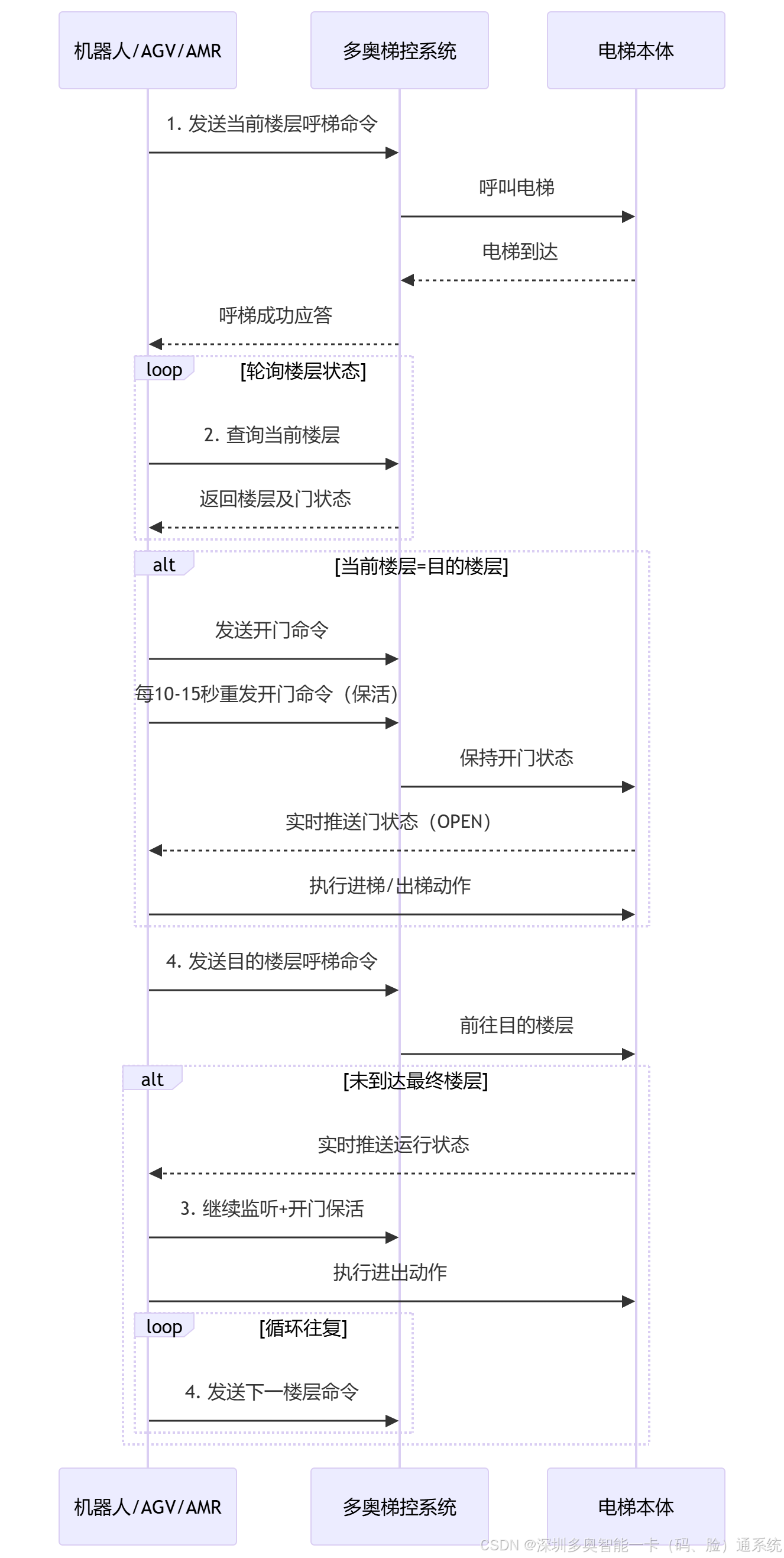
📋 完整乘梯流程详解
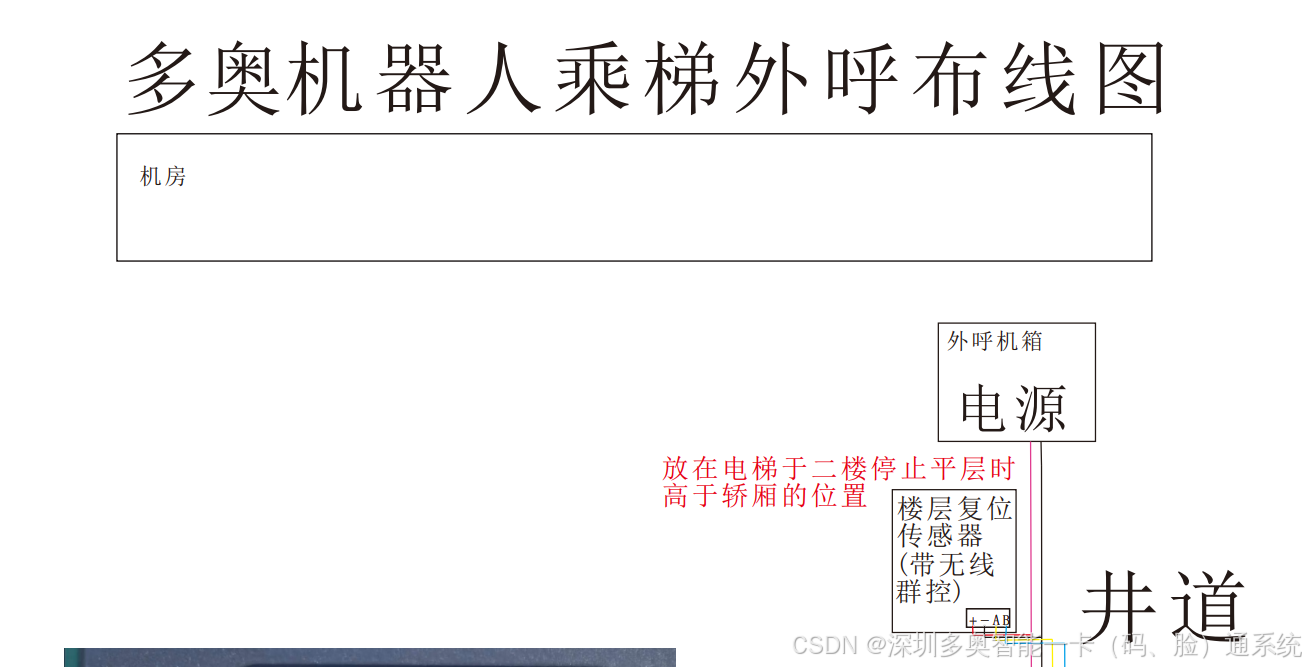
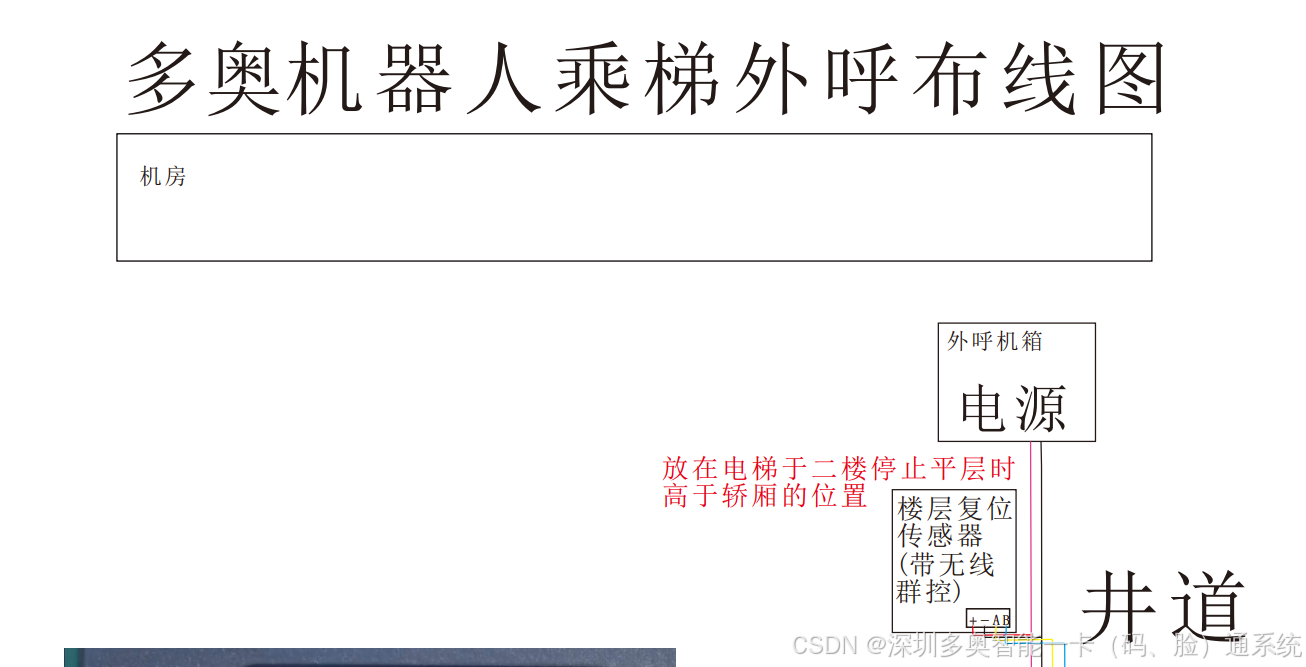
第一步:发起呼梯请求(外召/内召)
| 当前位置 | 3楼电梯厅 |
| 操作 | 机器人向多奥外呼设备(DAIC-TK-WH)发送呼梯命令 |
| 指令内容 | "我在3楼,需要上行" |
| 系统响应 | 梯控系统点亮3楼"上行"按钮,调度电梯前往3楼 |
💡 说明:如果机器人已经在电梯内,则向内召面板(DAIC-TK-MB)发送召梯命令
第二步:查询楼层 + 预开门准备
| 电梯运行中 | 机器人持续发送查询命令,询问"电梯现在在哪一层?" |
| 到达3楼平层 | 系统反馈:"当前3楼,已平层" |
| 确认目的层 | 机器人判断:3楼 ≠ 目的楼层(8楼),但这是我上车的楼层 |
| 发送开门指令 | 立即发送开门命令,并每隔10-15秒重复发送一次,防止门关闭 |
⚠️ 关键:此时机器人还未进梯,但需要提前让门保持开启状态
第三步:进出电梯(实时状态监控)
机器人状态监控循环:
├─ 实时接收梯控数据:电梯运行方向?当前楼层?门状态?
├─ 检测到"门已开启" → 开始驶入电梯
├─ 进梯过程中(约5-10秒):
│ └─ 持续每隔10-15秒发送"开门"命令(防止门夹到机器人)
├─ 完全进入电梯轿厢 → 停止发送开门命令
└─ 准备下一步:发送目的楼层指令
🔒 安全保障:如果门意外关闭,机器人会立即停止移动,重新发送开门指令

第四步:轿厢内选择目的楼层(内召)
| 当前状态 | 机器人已在电梯内 |
| 操作 | 向多奥内召面板(DAIC-TK-MB)发送召梯命令 |
| 指令内容 | "我要到8楼" |
| 系统响应 | 点亮8楼按钮,电梯开始上行 |
第五步:到达目的楼层 + 出梯
此时流程倒序执行:
第三步(重复):监控电梯状态
↓ 检测到到达8楼 + 门开启
↓ 开始驶出电梯
↓ 每隔10-15秒发送开门命令(防止关门夹机器人)
↓ 完全离开电梯轿厢
第二步(重复):确认已到达目的楼层,停止发送开门命令
第一步/第四步(重复):如果还需要去其他楼层,重新发起新的呼梯请求
🔄 流程状态机图示
┌─────────────┐
│ 起始状态 │
│ (3楼等待) │
└──────┬──────┘
↓
┌─────────────┐
│ 发送外召指令 │◄─────────────────┐
│ (DAIC-TK-WH) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ │
│ 查询电梯状态 │ │
│ (是否到达3楼) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ 否 │
│ 到达目的楼层? │───────────────┘
│ (3楼=上车层) │
└──────┬──────┘
↓ 是
┌─────────────┐
│ 发送开门指令 │◄─────────────────┐
│ (10-15秒循环) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ 门关闭 │
│ 门开着? │──────────────────┘
└──────┬──────┘
↓ 是
┌─────────────┐
│ 进入电梯 │◄─────────────────┐
│ (持续发开门) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ 未完全进入 │
│ 完全进入? │──────────────────┘
└──────┬──────┘
↓ 是
┌─────────────┐
│ 发送内召指令 │
│ (DAIC-TK-MB) │
│ "去8楼" │
└──────┬──────┘
↓
┌─────────────┐
│ 查询电梯状态 │
│ (是否到达8楼) │
└──────┬──────┘
↓
┌─────────────┐ 否 │
│ 到达目的楼层? │────────────────┘
│ (8楼) │
└──────┬──────┘
↓ 是
┌─────────────┐
│ 发送开门指令 │◄─────────────────┐
│ (10-15秒循环) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ 门关闭 │
│ 门开着? │──────────────────┘
└──────┬──────┘
↓ 是
┌─────────────┐
│ 离开电梯 │◄─────────────────┐
│ (持续发开门) │ │
└──────┬──────┘ │
↓ │
┌─────────────┐ 未完全离开 │
│ 完全离开? │──────────────────┘
└──────┬──────┘
↓ 是
┌─────────────┐
│ 任务完成 │
│ (到达8楼) │
└─────────────┘
💡 关键设计要点总结
| 10-15秒心跳保活 | 防止电梯门在机器人进出过程中关闭,造成夹伤或任务中断 |
| 实时状态监控 | 通过梯控反馈的"上下行、楼层、门状态"决定机器人动作 |
| 外召/内召分离 | 厅外呼叫用DAIC-TK-WH,轿厢内选层用DAIC-TK-MB |
| 循环查询机制 | 机器人不会"盲等",而是主动轮询电梯状态 |
| 异常安全处理 | 任何环节门关闭都会触发重新开门,确保安全第一 |
这个流程确保了人机混乘场景下的安全性,也适用于AGV、AMR、机器狗等不同形态的移动机器人
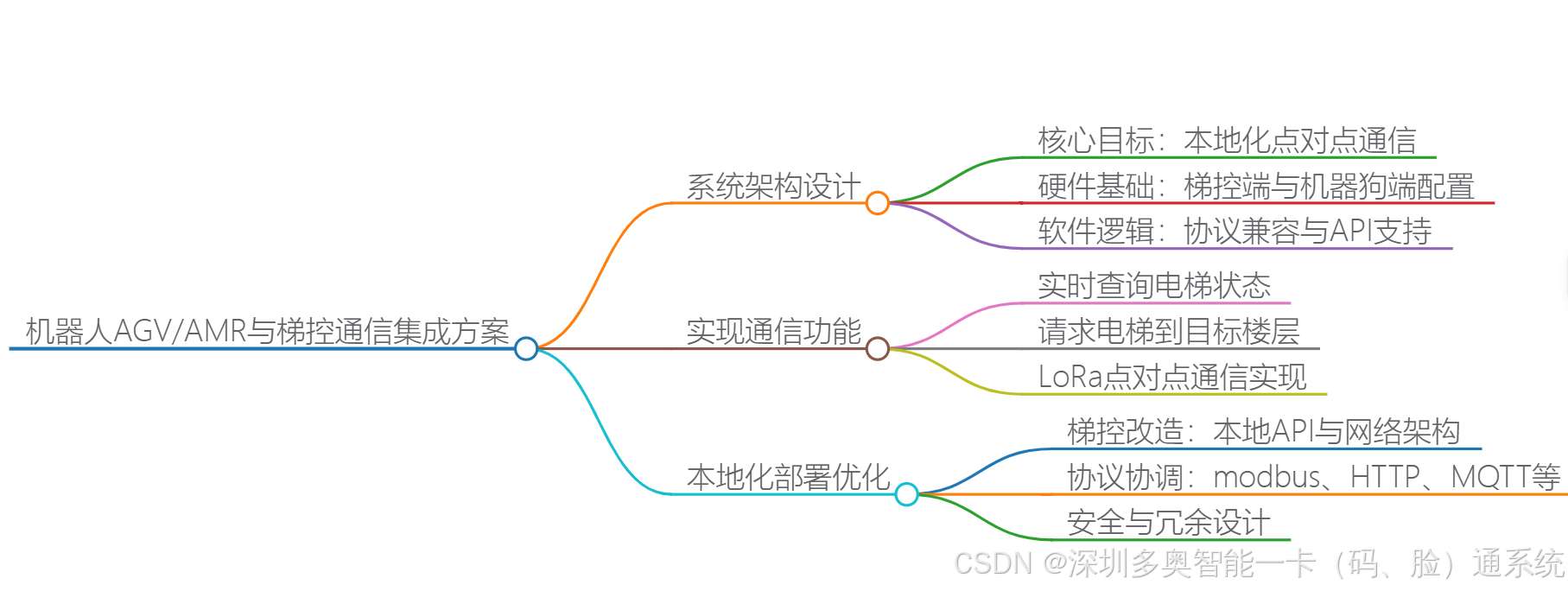
为了帮助大家更准确地理解,我结合当前主流的梯控技术(如多奥DAIC系统)和工业实践,为你梳理了正确的全流程,并指出了原描述中的关键误区。
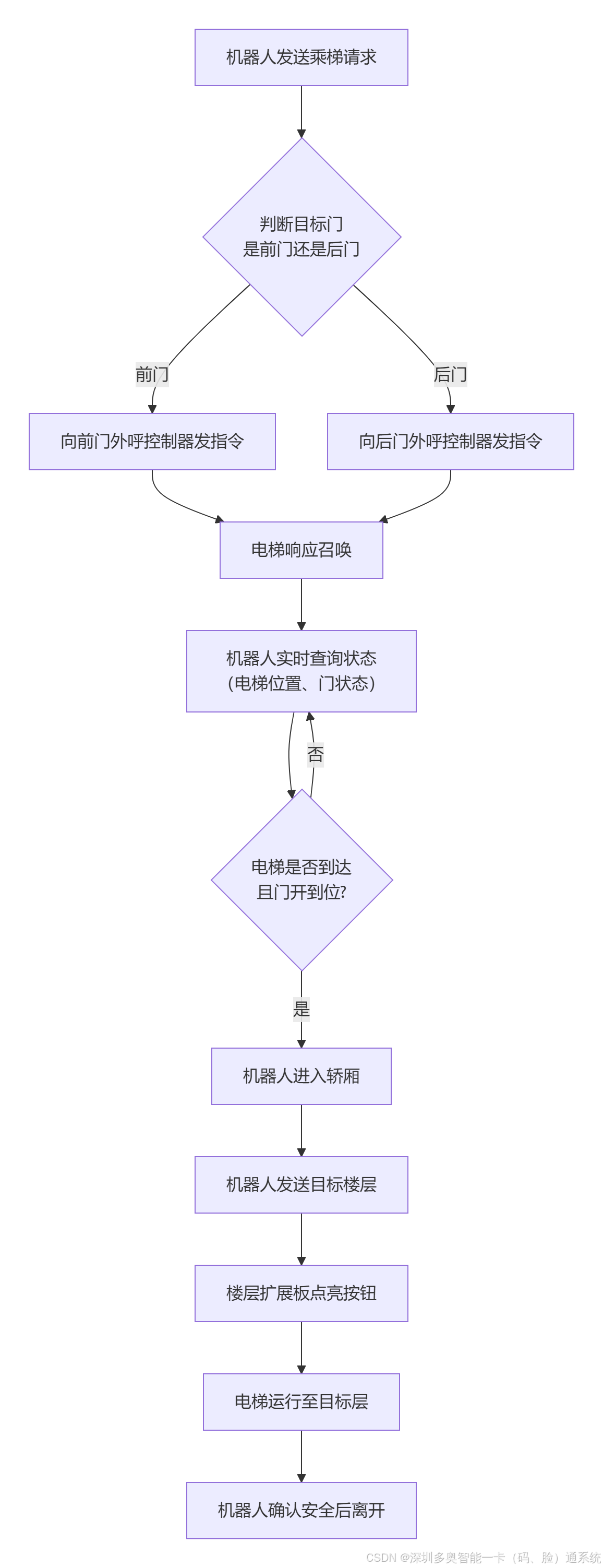
🤖 机器人乘梯全流程(修正版)
机器人乘梯是一个严谨的闭环过程,通常分为四个阶段:
1️⃣ 第一阶段:召唤电梯(外呼/内呼)
动作:机器人到达电梯厅,向梯控系统发送“外呼”指令(包含所在楼层和方向:上/下)。
系统响应:电梯接收到指令后,运行至机器人所在楼层。
注意:如果是低成本的“纯内呼”方案,机器人需先发送“点亮当前楼层”的内呼指令来召唤电梯,逻辑更复杂且效率较低。
2️⃣ 第二阶段:进入电梯(安全进入 + 开门保持)
状态校验:机器人必须实时读取电梯状态(运行方向、楼层、门状态),确认方向正确且门已完全打开。
高频开门:机器人开始进入时,需每隔1秒向梯控发送一次“点亮开门按钮”指令,防止门在进入过程中关闭。
误区纠正:原描述中“10-15秒发送一次”是错误的。实际要求频率很高(约1秒/次),否则电梯会判定无人阻挡而关门,导致夹伤或任务失败。
停止指令:机器人完全进入后,停止发送开门指令。
3️⃣ 第三阶段:选择楼层(内呼选层)
动作:机器人确认电梯门关闭且处于稳定状态后,向梯控发送“内呼”指令(包含目标楼层)。
关键禁忌:严禁发送“强制关门”指令。必须依赖电梯自身的光幕和防夹逻辑自动关门,否则会屏蔽安全机制,存在极高风险。
4️⃣ 第四阶段:离开电梯(到站驶出)
状态监测:电梯运行期间,机器人以毫秒级频率(30-50ms/次)查询状态,当检测到“当前楼层=目标楼层”且“门开到位”时,启动驶出动作。
再次开门保持:机器人开始驶出时,再次以1秒/次的频率发送开门指令,确保在尾巴离开前门不会关闭。
结束:完全驶出后,停止发送指令,任务完成。





评论前必须登录!
注册