 网硕互联帮助中心
网硕互联帮助中心前言
在计算机视觉学习过程中,实时摄像头视频流处理是最基础也最核心的应用场景之一。本文基于OpenCV-Python实现了一个完整的摄像头实时处理demo,涵盖曝光参数动态调节、双边滤波降噪、灰度转换与二值化等核心功能,适合OpenCV入门学习者理解视频流处理的基本流程和关键API用法,也是博主准备电赛时认为非常好用的图像处理方法。
目录
前言
一、功能整体说明
二、环境准备
三、代码逐行解析
3.1 基础初始化:摄像头调用与窗口创建
3.2 曝光参数动态调节:滑动条绑定
3.3 降噪参数动态调节:双边滤波滑动条
3.4 视频流循环处理:核心逻辑
3.5 资源释放:异常处理与收尾
四、运行效果与常见问题
4.1 运行效果
4.2 常见问题解决
五、扩展与优化方向
六、总结
附:完整代码
补充说明
论文投稿: 第二届计算机视觉研究进展与应用国际学术会议 (ACVRA 2026) 大会官网:https://ais.cn/u/2YrM7j 大会时间:2026年2月6-8日 大会地点:中国-武汉

一、功能整体说明
本代码实现的核心功能:
调用电脑本地摄像头,实时读取视频流并显示原始画面;
通过滑动条动态调节摄像头曝光参数,实时预览曝光调整效果;
对原始画面进行双边滤波降噪处理,单独窗口显示降噪后效果;
将降噪后的图像转为灰度图,并通过阈值处理生成二值图像,单独窗口展示;
支持按键退出,自动释放摄像头资源并关闭所有窗口。
二、环境准备
在运行代码前,需确保环境已安装对应依赖:
# 安装OpenCV-Python
pip install opencv-python
# 验证安装(可选)
python -c "import cv2; print(cv2.__version__)"
注意:不同操作系统(Windows/macOS/Linux)的摄像头调用逻辑一致,但部分设备可能需要调整摄像头ID(通常0为内置摄像头,1为外接摄像头)。
三、代码逐行解析
3.1 基础初始化:摄像头调用与窗口创建
import cv2
def main():
# 摄像头设备编号,通常0为内置摄像头,1为外接
camera_id = 0
# 创建VideoCapture对象,绑定摄像头
cap = cv2.VideoCapture(camera_id)
# 检查摄像头是否成功打开
if not cap.isOpened():
print("Error: Could not open camera.")
return
# 创建显示窗口(WINDOW_NORMAL支持窗口大小调整)
cv2.namedWindow('Camera Feed', cv2.WINDOW_NORMAL) # 原始画面窗口
cv2.namedWindow('Denoised', cv2.WINDOW_NORMAL) # 降噪后窗口
cv2.namedWindow('Binary', cv2.WINDOW_NORMAL) # 二值化窗口
-
cv2.VideoCapture(camera_id):创建视频捕获对象,参数为摄像头设备ID,若调用失败需检查摄像头是否被占用或ID是否正确;
-
cap.isOpened():校验摄像头是否成功打开,是避免程序崩溃的关键判断;
-
cv2.namedWindow():创建显示窗口,cv2.WINDOW_NORMAL参数允许手动调整窗口大小(默认WINDOW_AUTOSIZE为固定大小)。
3.2 曝光参数动态调节:滑动条绑定
# 初始曝光值(不同摄像头取值范围不同,需自行测试)
initial_exposure_value = -6
cap.set(cv2.CAP_PROP_EXPOSURE, initial_exposure_value)
# 定义曝光调整回调函数
def on_exposure_change(value):
# 滑动条取值范围是0-20,转换为实际曝光值(-10 ~ 10)
cap.set(cv2.CAP_PROP_EXPOSURE, value – 10)
# 创建曝光调节滑动条:参数(滑动条名,绑定窗口,初始值,最大值,回调函数)
cv2.createTrackbar('Exposure', 'Camera Feed', 10, 20, on_exposure_change)
# 设置滑动条初始位置(对应初始曝光值)
cv2.setTrackbarPos('Exposure', 'Camera Feed', initial_exposure_value + 10)
核心知识点:
-
cv2.CAP_PROP_EXPOSURE:摄像头曝光属性常量,不同设备的曝光值范围不同(通常为负数,值越小曝光越低);
-
cv2.createTrackbar():创建滑动条,需绑定到指定窗口,滑动时触发回调函数;
-
回调函数on_exposure_change:滑动条的取值会作为参数传入,此处通过value – 10将滑动条的0-20范围转换为实际曝光值的-10~10范围,适配摄像头曝光参数。
3.3 降噪参数动态调节:双边滤波滑动条
# 定义降噪参数回调函数
def on_denoise_change(value):
nonlocal denoise_value # 声明使用外部的denoise_value变量
denoise_value = value
# 初始降噪参数
denoise_value = 10
# 创建降噪调节滑动条
cv2.createTrackbar('Denoise', 'Denoised', 10, 100, on_denoise_change)
cv2.setTrackbarPos('Denoise', 'Denoised', denoise_value)
-
nonlocal关键字:用于在嵌套函数中修改外部函数的变量(若用global则是修改全局变量);
-
滑动条最大值设为100:双边滤波的核大小参数不宜过大,否则会导致画面模糊过度且处理速度变慢。
3.4 视频流循环处理:核心逻辑
try:
while True:
# 读取一帧图像:ret为是否读取成功,frame为帧数据(BGR格式)
ret, frame = cap.read()
if not ret:
print("Failed to grab frame")
break
# 显示原始画面
cv2.imshow('Camera Feed', frame)
# 双边滤波降噪:参数(图像,核大小,颜色空间标准差,像素空间标准差)
denoised = cv2.bilateralFilter(frame, denoise_value, 75, 75)
# 显示降噪后画面
cv2.imshow('Denoised', denoised)
# 灰度转换:BGR(OpenCV默认)转GRAY
gray = cv2.cvtColor(denoised, cv2.COLOR_BGR2GRAY)
# 二值化处理:参数(灰度图,阈值,最大值,二值化方式)
_, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 显示二值化画面
cv2.imshow('Binary', binary)
# 按键检测:每1ms检测一次,按下q键退出
key = cv2.waitKey(1) & 0xFF
if key == ord('q'):
break
核心API解析:
cap.read():逐帧读取视频流,返回值ret为布尔型(是否读取成功),frame为当前帧的图像数据(OpenCV默认BGR颜色空间);
cv2.bilateralFilter():双边滤波,相比均值滤波、高斯滤波,能在降噪的同时保留图像边缘细节,参数说明:
第1个参数:输入图像;
第2个参数:滤波核大小(需为奇数,值越大降噪效果越强,但处理速度越慢);
第3个参数:颜色空间标准差(值越大,允许更多颜色差异的像素参与滤波);
第4个参数:像素空间标准差(值越大,滤波范围越大);
cv2.cvtColor():颜色空间转换,COLOR_BGR2GRAY将BGR彩色图转为灰度图;
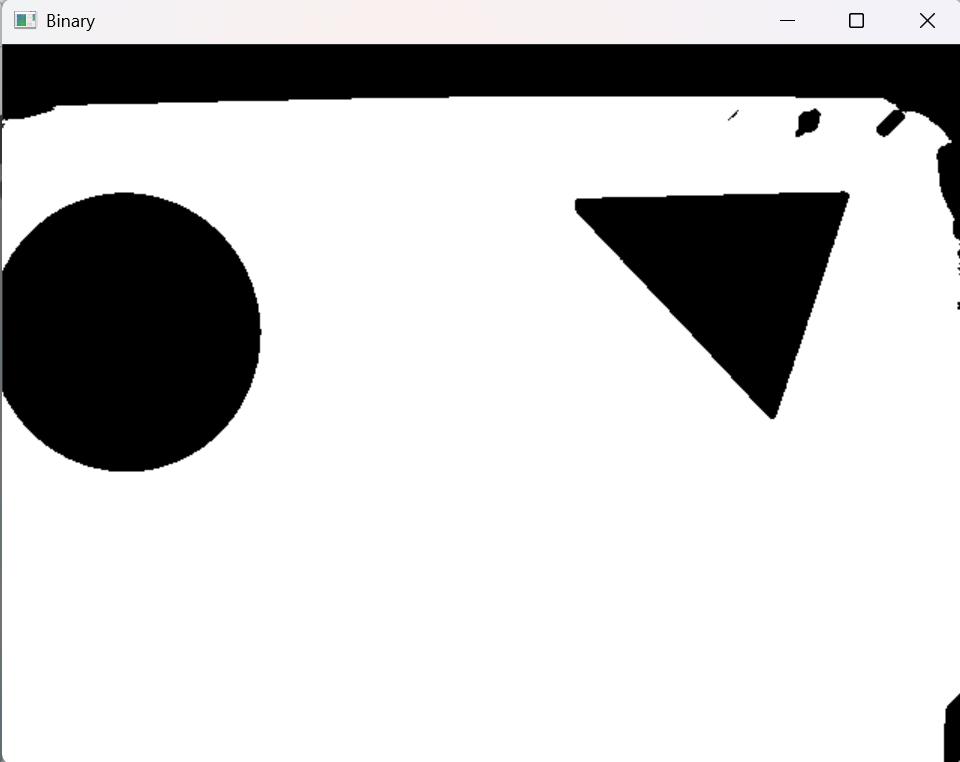
cv2.threshold():固定阈值二值化,127为阈值,255为最大值,THRESH_BINARY表示:
像素值 > 127 → 255(白色);
像素值 ≤ 127 → 0(黑色);
cv2.waitKey(1):按键检测,参数为等待时间(ms),返回按键的ASCII码,& 0xFF用于兼容不同平台的按键值。
3.5 资源释放:异常处理与收尾
finally:
# 释放摄像头资源
cap.release()
# 关闭所有创建的窗口
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
-
finally代码块:无论循环正常退出还是异常中断,都会执行资源释放,避免摄像头被占用;
-
cap.release():释放VideoCapture对象,必须调用,否则后续无法再次调用摄像头;
-
cv2.destroyAllWindows():关闭所有OpenCV创建的窗口,清理内存。
四、运行效果与常见问题
4.1 运行效果
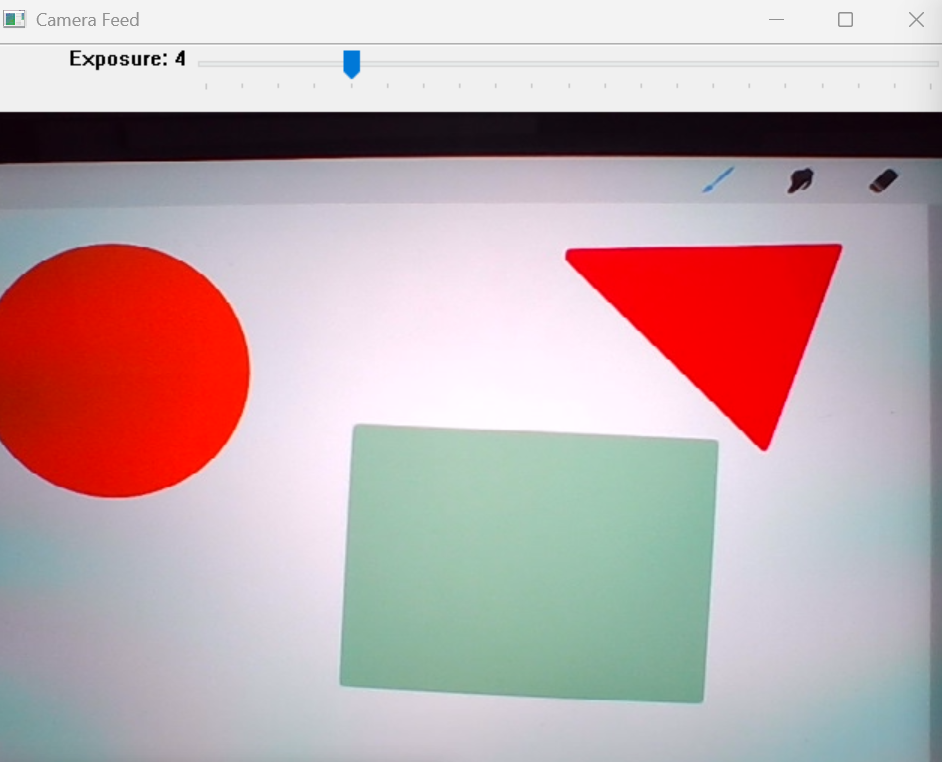
启动程序后,会弹出3个窗口:
-
Camera Feed:原始摄像头画面,带有曝光调节滑动条;
-
Denoised:降噪后的画面,带有降噪参数滑动条;
-
Binary:二值化后的黑白画面。
拖动滑动条可实时调整曝光和降噪效果,按下q键退出程序。

4.2 常见问题解决
摄像头无法打开:
检查摄像头是否被其他程序占用(如微信、Zoom);
调整camera_id为1或2,尝试外接摄像头;
Linux/macOS需赋予摄像头权限:sudo chmod 777 /dev/video0。
曝光调节无效果:
部分笔记本摄像头不支持手动调节曝光,需更换摄像头;
调整滑动条的取值范围(如将20改为30),适配不同摄像头的曝光参数范围。
画面卡顿:
降低双边滤波的核大小(减小denoise_value的最大值);
关闭其他占用CPU/GPU的程序,减少资源消耗。
五、扩展与优化方向
自适应阈值二值化:替换固定阈值为cv2.adaptiveThreshold(),适配不同光照环境;
帧率显示:添加帧率计算逻辑,在画面上显示实时FPS;
图像保存:添加按键触发功能,保存当前帧的原始/降噪/二值化图像;
色彩空间切换:增加HSV、YCrCb等色彩空间的转换和显示;
实时边缘检测:在二值化基础上添加Canny边缘检测,增强特征提取能力。
六、总结
本文通过一个完整的OpenCV摄像头处理demo,讲解了视频流读取、参数动态调节、图像滤波、颜色空间转换和二值化等核心知识点。关键要点:
OpenCV处理摄像头视频流的核心流程是「打开摄像头→逐帧读取→处理→显示→释放资源」;
滑动条结合回调函数可实现参数动态调节,提升交互性;
双边滤波是兼顾降噪和边缘保留的优质滤波算法,适合实时视频处理;
二值化是图像分割和特征提取的基础,需根据场景选择固定阈值或自适应阈值。
通过本案例的学习,可掌握OpenCV实时视频处理的基本框架,为后续的人脸检测、物体跟踪等高级应用打下基础。
附:完整代码
import cv2
def main():
# 摄像头设备编号,通常是0或1
camera_id = 0
# 创建VideoCapture对象
cap = cv2.VideoCapture(camera_id)
# 检查是否成功打开摄像头
if not cap.isOpened():
print("Error: Could not open camera.")
return
# 创建一个窗口来显示视频流
cv2.namedWindow('Camera Feed', cv2.WINDOW_NORMAL)
cv2.namedWindow('Denoised', cv2.WINDOW_NORMAL)
cv2.namedWindow('Binary', cv2.WINDOW_NORMAL)
# 初始曝光值
initial_exposure_value = -6
cap.set(cv2.CAP_PROP_EXPOSURE, initial_exposure_value)
# 创建一个滑动条
def on_exposure_change(value):
# 更新曝光值
cap.set(cv2.CAP_PROP_EXPOSURE, value – 10)
# 创建滑动条,初始位置设为中间值
cv2.createTrackbar('Exposure', 'Camera Feed', 10, 20, on_exposure_change)
cv2.setTrackbarPos('Exposure', 'Camera Feed', initial_exposure_value + 10)
# 创建一个滑动条来调整双边滤波的参数
def on_denoise_change(value):
nonlocal denoise_value
denoise_value = value
denoise_value = 10
cv2.createTrackbar('Denoise', 'Denoised', 10, 100, on_denoise_change)
cv2.setTrackbarPos('Denoise', 'Denoised', denoise_value)
try:
while True:
# 读取一帧图像
ret, frame = cap.read()
if not ret:
print("Failed to grab frame")
break
# 显示原始图像
cv2.imshow('Camera Feed', frame)
# 应用双边滤波进行降噪(核大小需为奇数,避免报错)
denoise_ksize = denoise_value if denoise_value % 2 == 1 else denoise_value + 1
denoise_ksize = max(1, denoise_ksize) # 确保核大小至少为1
denoised = cv2.bilateralFilter(frame, denoise_ksize, 75, 75)
# 显示降噪后的图像
cv2.imshow('Denoised', denoised)
# 将图像转换为灰度图像
gray = cv2.cvtColor(denoised, cv2.COLOR_BGR2GRAY)
# 应用阈值处理,得到二值图像
_, binary = cv2.threshold(gray, 127, 255, cv2.THRESH_BINARY)
# 显示二值图像
cv2.imshow('Binary', binary)
# 获取按键输入
key = cv2.waitKey(1) & 0xFF
# 按下 'q' 键退出循环
if key == ord('q'):
break
finally:
# 在最后释放资源和关闭窗口
cap.release()
cv2.destroyAllWindows()
if __name__ == "__main__":
main()
补充说明
优化后的代码修复了双边滤波核大小为偶数时的报错问题,增加了参数合法性校验,提升了程序的健壮性。在CSDN发布时,可搭配运行效果截图(如3个窗口的实际显示效果),并在评论区与读者互动解答问题。



评论前必须登录!
注册