 网硕互联帮助中心
网硕互联帮助中心最近项目上使用了一批高创的伺服电机,其中有垂直龙门应用,有双反馈应用,以前项目上高创的伺服使用的不多,这次遇到了很多问题,今天重点分享一下,做双反馈时,光栅尺贴短了,出现飞车的处理。
现象:调试人员点动运动,移动出了光栅尺,伺服没有立刻报警。后面又用总线控制器把电机移到光栅尺范围内,断电重启,再用控制器上使能,伺服直接失控高速撞到硬极限了。
发现问题:
1.问题确认是光栅尺贴短了,需要把光栅尺加长冲重新贴。
2.读数头脱离光栅尺,伺服没有第一时间报警,并且后续还发生了飞车,需要解决报警的问题。
处理过程:
1.更换光栅尺,从根本上解决问题。
2.发现最大位置误差PEMAX没有设置,原本是0,这样位置误差报警没有启用。读数头脱离光栅尺,就会产生位置误差,设置了0.5mm,就会报警了。

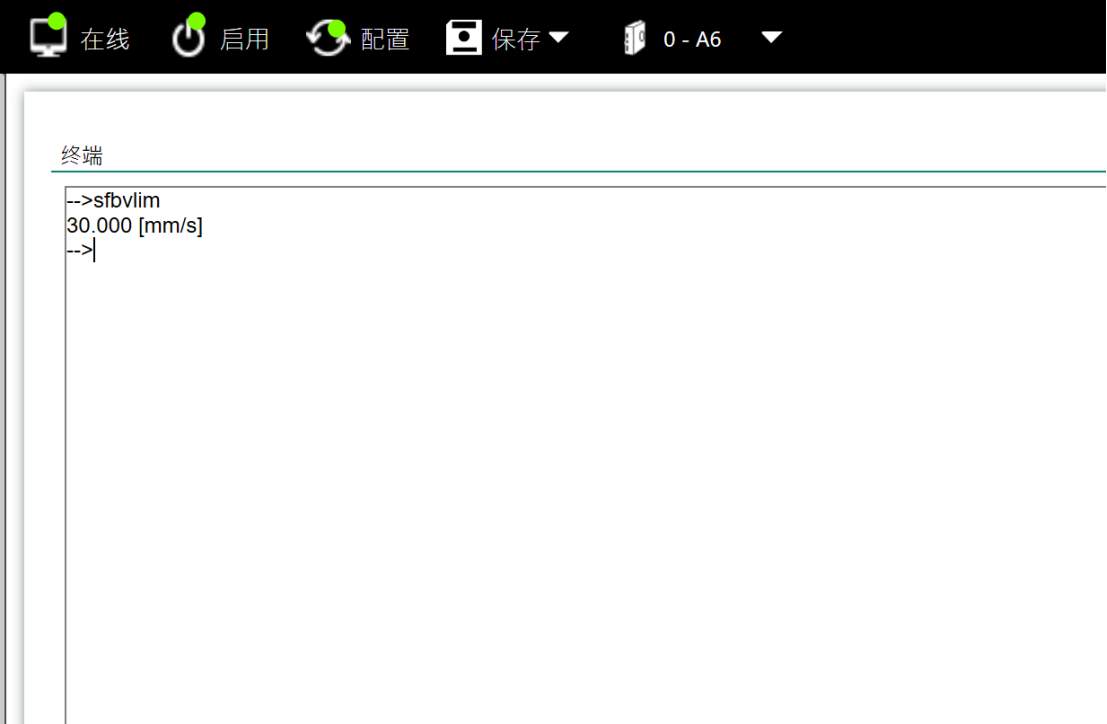
3.对速度进行了限制,在终端,输入sfbvlim查看最大速度限制,然后把sfbvlim=30,把最大速度进行了限制。我们实际速度也不需要很快。
结果验证:经过多次测试,在双反馈模式下,运动电机让读数头脱离光栅尺,电机还是会立刻冲出到硬极限,但是速度是变慢的,没有产生剧烈的高速撞击,停止后,有位置误差报警。清除报警,还是可以继续把电机移动到光栅尺范围内,断电重启,也不会再发生飞车,说明问题解决了。





评论前必须登录!
注册