 网硕互联帮助中心
网硕互联帮助中心1、激光探测器
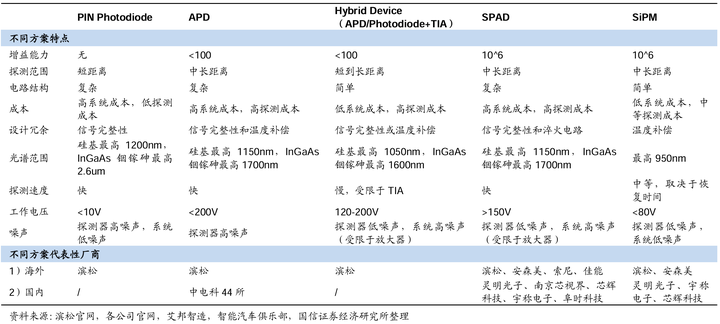
图1 激光雷达探测器汇总
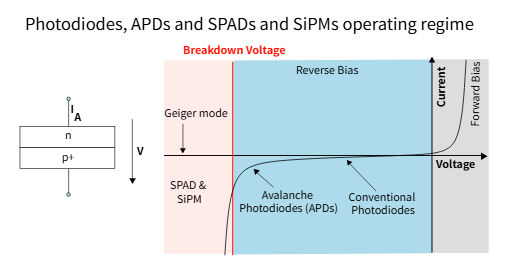
图2 Operation Regimes of a solid state p-n junction including conventional photodiodes, avalanche photodiodes (APD) and and single-photon avalanche diode (SPAD) or SiPMs.
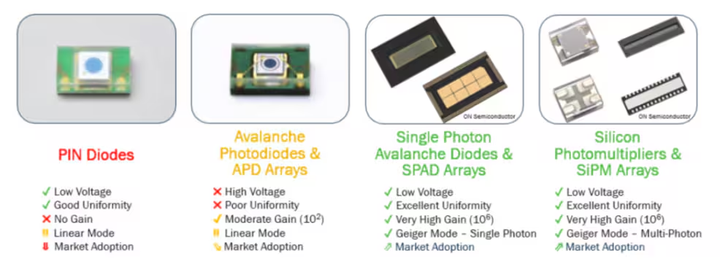
图3 几种光电探测器对比
2、PIN Photodiode
PIN 光电二极管是一种可以改变耗尽层厚度以产生较大光电流的光电探测器。耗尽层厚度越大,光照射的表面积也越大。因此,光电二极管的转换效率越高,产生的光电流也就越大。
P 型层、本征层和 N 型层相互夹持,形成两个结:NI 结和 PI 结。P+ 层可以通过离子注入获得,本征层是在 N 型衬底上生长的外延层。由于浓度梯度的存在,来自 N 侧的电子和来自 P 侧的空穴会发生扩散。
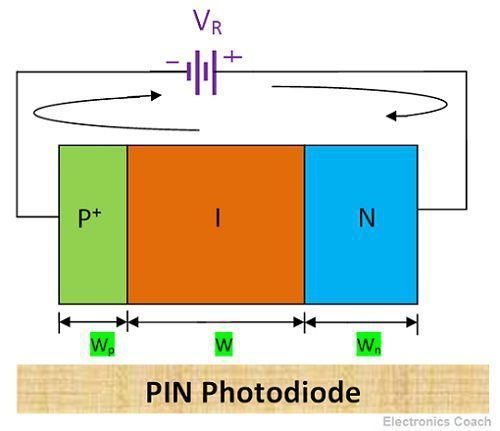
图4 PIN 光电二极管的构造
耗尽区形成。耗尽区在本征区较宽,在N型层较窄。P型端连接到电池负极,N型端连接到电池正极。
当PIN二极管施加反向偏压时,耗尽区在本征区开始增加。随着反向电压的增加,耗尽区宽度进一步增加。当耗尽区的宽度等于本征层的厚度时,就达到了耗尽区阶段。此时,本征层中不再有移动的载流子。
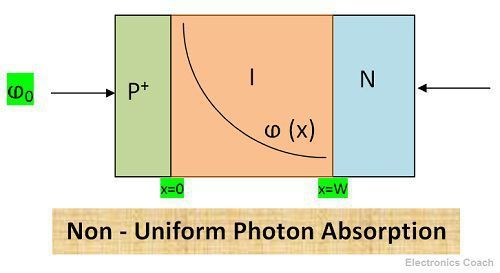
图5 PIN光电二极管的工作原理
假设一个光子通量ⱷ0入射到二极管的P+区,并且P+区的宽度与本征层和N型层相比非常小。光子通量可以定义为距离的函数:ⱷ(x) =ⱷ0e–αx
这里α是光子吸收系数,x随本征层宽度而变化。光子通量产生的光电流密度可以用下式给出。
JL= eWƪ 0GLdx= eWƪ 0ⱷ0e-αxdx = eⱷ0(1 – e–αW)
其中,JL 为光电流密度,GL 为本征层边缘电子空穴对的产生速率。上式假设耗尽区内没有电子-空穴复合,即完全没有移动载流子。每个吸收的光子都会产生一个电子-空穴对。
PIN 光电二极管的优缺点
-
PIN 光电二极管的优点在于其高频响应,并且其频率响应也高于硫化镉光电探测器。
-
PIN 光电二极管价格低廉,响应时间以纳秒为单位,非常适合用于电子电路。
-
PIN 光电二极管具有宽光谱响应,甚至可以处理非常微弱的信号。
-
PIN 光电二极管的缺点在于其工作时需要较大的反向偏压,这有时会降低信噪比。
由于其能够检测微弱信号,PIN光电二极管可用于检测激光脉冲、超快速开关电路和逻辑电路。
3、Avalanche Photodiode(APD)
雪崩光电二极管是一种光电探测器,通过碰撞电离产生更多的电子-空穴对。它类似于P-N光电二极管或PIN光电二极管,通过吸收光子产生电子-空穴对,但除此之外,雪崩光电二极管还利用碰撞电离原理来增加光电流。
它由四个区域组成:N+区、P区、本征层和P+区。N+区和P+区为重掺杂区,本征层为轻掺杂区。下图可以更清楚地理解它的结构。
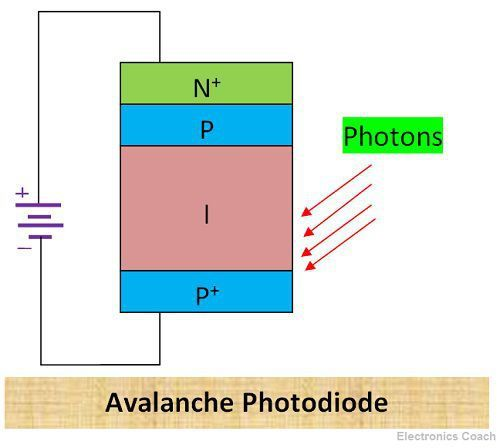
图6 雪崩光电二极管的结构
在雪崩二极管中,引入了一个额外的因素来引起撞击电离,从而使光电流成倍增加。这个额外的因素称为雪崩倍增因子。撞击电离是指一个具有足够高动能的载流子撞击束缚载流子并将其能量传递给束缚载流子,使束缚载流子能够自由移动的过程。这会导致载流子浓度升高,从而产生更大的电流。
这种撞击注入现象在增加光电流方面起着重要作用。雪崩光电二极管的电流增益带宽(current – gain bandwidth)积约为100 GHz。因此,这种光电二极管可以响应微波频率调制的光。
雪崩光电二极管的优缺点
-
由于电流增益带宽积高,它可以检测到非常微弱的信号。
-
其结构相当复杂,因此需要特别注意结点。结点应均匀,并使用保护环保护二极管免受边缘击穿的影响。
由于其能够检测低电平信号,因此被用于光纤通信系统。设计合理的硅雪崩光电二极管可以提供约 1ns 的响应时间。
4、单光子雪崩二极管(SPAD)
根据光电二极管的 I-V 特性,可分为太阳能电池模式、光电二极管模式、雪崩模式、盖革模式等几种工作状态,下图是光电二极管分别在明暗条件下的 I-V 曲线。盖革模式下的光电二极管的增益理论上是无穷的,所以经常被用来进行单光子探测,也称作单光子雪崩二极管(SPAD)。
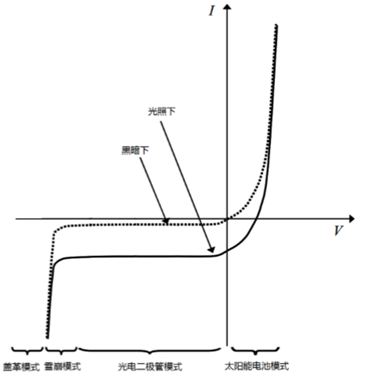
图7 光电二极管的 I-V 特性
在盖革模式下,雪崩光电二极管吸收光子会产生电子-空穴对,在高反偏电压产生的强电场作用下电子-空穴对被加速,从而获得足够的能量,然后与晶格发生碰撞,形成连锁效应,结果形成大量的电子-空穴对,引发雪崩现象,电流成指数增长。此时 SPAD 的增益理论上是无穷的,单个光子就能够使 SPAD 的光电流达到饱和。
SPAD 的特征参数有很多,主要包括光子探测效率、雪崩倍增因子、响应度、暗计数等。
1)光子探测效率:光子入射 SPAD 后激发雪崩并被检测到的概率称为光子探测效率(Photon Detection Efficiency),是代表 SPAD 性能的一个重要参数,定义为输出的光生电子-空穴对数目与入射总光子数的比值。
理想情况下的光子探测效率为 1,然而实际上并不是所有的光子都可以引发雪崩并被检测到,SPAD 表面的反射和吸收不完全都会影响到光子探测效率。
光子探测效率η:

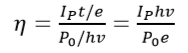
其中 P0为入射光功率,IP为光生电子-空穴对形成的光电流,h 为普朗克常量,ν 为
入射光子频率,e 是电子电量。
2)雪崩倍增因子:雪崩倍增因子是指 SPAD 发生雪崩击穿后的电流与雪崩击穿前的电流的比值,即SPAD 的电流增益。雪崩倍增因子在理论上是无穷大的,在雪崩击穿后非常短的时间内电流就能够达到饱和,雪崩倍增因子是由 SPAD 的反向偏压以及结构决定的,实际测试中,通常能达到十万以上。
3)响应度:用来表示入射光产生的光电流和入射光的功率之间的关系,即光电流与入射光的功率的比值。
其中 e 为电子电量,η为光子探测效率,λ 为光子波长,h 为普朗克常量,ν 为入射光子频率,c 为光速。
入射光子波长影响单光子雪崩二极管的响应度,不同材料的半导体对不同波长的光信号有不同的吸收效果,例如,硅的吸收光谱范围是 400nm 到 1100nm,在短波段具有较高的响应度。而 InGaAs 吸收光谱范围是 900 nm 到 1700 nm,在长波段具有较高的响应度。所以在设计 SPAD 时,要根据所探测光子的波段来选择合适的半导体材料,以获得较高的响应度。
4)暗计数:暗计数是指在单光子探测领域,杂散光(非信号光)和电噪声也会有被单光子探测器认为是有效光信号的可能性,在此领域内,这种误判被称作暗计数,是 SPAD 性能的一个重要参数。通常情况下,热噪声和隧穿效应都会产生暗载流子,这是主要的噪声来源,暗载流子同样会引发 SPAD 雪崩,然而检测电路无法将其和入射光引发的雪崩区别开来,从而对他们同样进行计数,因此形成了虚假的光子计数,所以,想办法减少暗计数是 SPAD 设计过程中很重要的一点。
工作环境温度和反偏电压的大小直接影响暗计数, 通常在较低温度的环境下,对SPAD进行测试,来减少由热效应产生的暗载流子。降低偏置电压也能较少暗计数,可是降低偏置电压又会降低探测效率,因此要选择合适的偏置电压,从而在暗计数和探测效率之间折中。
另外也可以进行如下理解:
APD 工作在模拟线性模式下,此时输出电流与入射光强度成正比。APD 还可以工作在另一种模式下,增益可达 106或更高,从而实现数字光子计数。这种 APD 工作模式称为盖革模式,即单光子雪崩探测器 (SPAD)。
单光子雪崩二极管 (SPAD) 是指一类能够检测低强度信号(低至单个光子)并以高时间分辨率(几十皮秒)测量光子到达时间的光电探测器。虽然传统光电探测器、光电二极管和许多雪崩光电二极管可能提供更高的灵敏度(更高的量子效率),但 SPAD 凭借其极高的信噪比 (SNR) 而擅长读取微光信号。SPAD 的这些特性使其非常适合单光子计数和其他超微光应用,例如激光雷达、光学断层扫描和量子计算、单分子分析、共聚焦显微镜、流式细胞术、晶圆检测、荧光寿命成像和粒度分析。SPAD 与雪崩光电二极管 (APD) 类似,利用反向偏置 pn 结的光子触发雪崩电流来检测入射辐射。 SPAD 和 APD 之间的主要区别在于 SPAD 在远高于击穿电压的反向偏置电压下工作。
5、硅光电倍增管 (SiPM) 和多像素光子计数器 (MPPC)
传统上,微光探测设备依赖于真空光电倍增管 (PMT)、雪崩光电二极管 (APD) 或带高增益放大器的 PIN 光电二极管。硅光电倍增管 (SiPM),也称为多像素光子计数器 (MPPC),提供了一种极具吸引力的替代方案,它模拟了 PMT 的微光探测能力,同时具备固态器件的优势,例如低工作电压、对磁场不敏感、机械强度高以及响应均匀性优异。
SiPM 是盖革模式下工作的雪崩光电二极管 (SPAD) 阵列,设计用于检测极弱的光,直至单个光子。根据光源和应用的不同,数百到数千个 SPAD 并联连接形成一个 SiPM。每个 SPAD 都包含一个集成串联电阻器,用于猝灭雪崩并复位二极管以接收下一个入射光子,如下图所示。SiPM 信号输出是与撞击传感器的光子数量成比例的电流。主要信号特点是:增益非常高(>1×10(6) 个光子)、响应非常快、恢复时间短。应用包括需要弱光检测和/或非常精确的时间信息的应用。典型的例子是基于闪烁体的探测器和飞行时间系统。
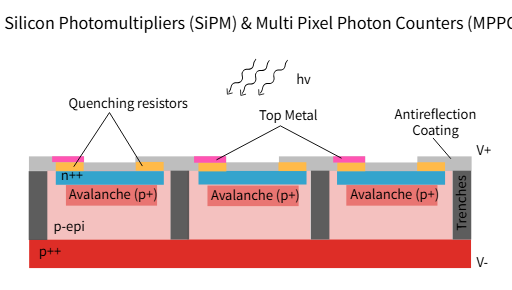
图8 SiPM探测器结构
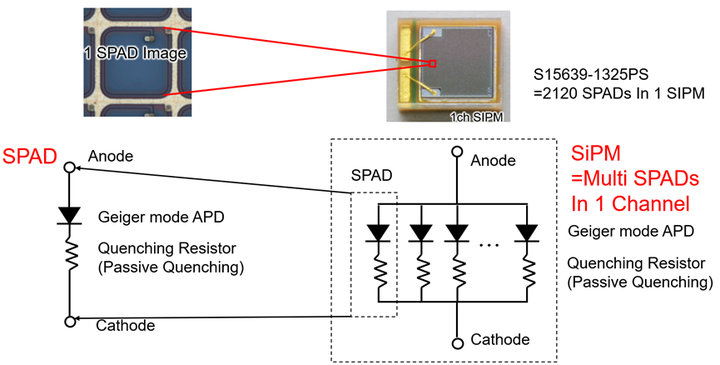
图9 SiPM探测器结构
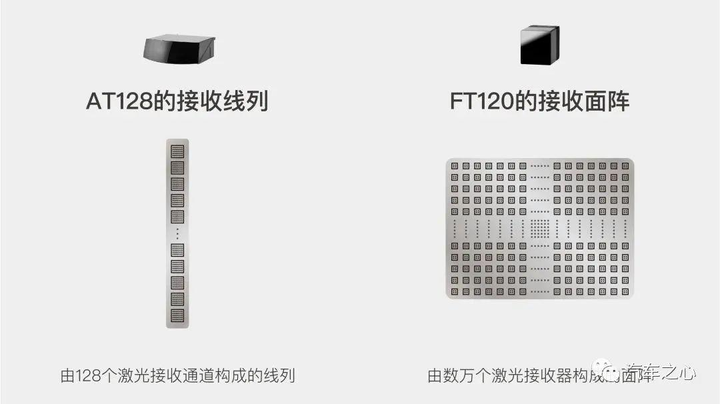
图10 接收面阵
6、性能参数
光电二极管效率 (PDE): PDE 类似于标准光电二极管的量子效率,描述的是探测到的光子数 ndetected与所有入射光子数 nincident 之比。可达到的最大 PDE 取决于量子效率和填充因子。例如,60% 的 PDE 表示每 10 个光子中可以探测到 6 个:
PhotonDetectionEfficiency(PDE)=ndetected/nincident
暗计数率:暗计数率是指在没有入射光的情况下计数的光子数量,这种光子是由二极管偏置时热运动引起的自发辐射引起的。为了降低暗计数率,可以使用双级热电元件(TEC冷却器)对单光子计数器进行主动冷却。暗计数率通常以每秒计数“cps”表示。需要注意的是,SPAD的根本权衡在于,暗计数率和光子探测效率会随着偏置电压的增加而增加。
恢复速度或死区时间:这是设备为下一个检测事件做好准备所需的时间。典型的死区时间在 1.5 – 100 ns之间。
光子通量与光功率的关系:单位时间内观察到的光子数量称为光子通量或计数率:
PhotonFlux=ndetected/t
时间分辨率:这是指以非常高的分辨率检测光子的能力,通常在 7.5 – 100 ps 的数量级。
击穿电压:高于此反向电压时,雪崩效应将自持,必须进行猝灭,通常使用猝灭电阻。
后脉冲和串扰(仅限SPAD和SiPM):当MPPC探测光子时,输出可能包含虚假信号,称为后脉冲和串扰。后脉冲是指一种相关噪声。电荷载流子可能会被捕获并在一段时间后释放,除了真实信号外,还会产生延迟的虚假信号。当探测光子的像素影响相邻像素时,就会发生串扰,导致它们在输出端产生双脉冲。这种噪声与入射光子的输出脉冲无关。在保持低后脉冲、低串扰和低暗计数的同时,保持高光子探测效率 (PDE) 至关重要。
动态范围:动态范围由每个 SiPM 的 SPAD 数量给出。
增益:增益是指触发后雪崩过程中电离的电子数量。换句话说,就是响应一个光子形成SiPM信号的电子数量。例如,如果增益为10(6),则表示每个光子在SiPM输出端收集到10(6) 个电子。
线性度:线性度是指光电探测器的输出与其输入具有线性关系的程度。
7、特点对比
SPAD 是单光子探测器,一次最多可以探测 1 个光子,并且每次光子探测后需要几纳秒的死时间,因此将最大计数率限制在 100 MHz 左右。
SiPM 由许多微单元并联组成,每个微单位由一个 SPAD 及其前端电路组成。因此,SiPM 是光子数分辨探测器,即它们提供有关同时检测到多少个光子的信息,因此它们可以达到比单个 SPAD 更高的计数率,与微单元(即 SPAD)的数量成比例:例如,具有 100 个 SPAD 的 SiPM 可以达到比单个 SPAD 高约 100 倍的计数率。
SPAD阵列是具有许多独立像素的探测器,每个像素包含一个SPAD、其有源前端电路,通常还包含一个处理电子器件(例如计数器或TDC),用于提供探测到的光子的累积数量或到达时间。因此,在SPAD阵列中,图像分辨率与SPAD的数量相对应。最终,SiPM阵列是每个像素都是一个SiPM的探测器;每个像素都可以提供空间信息,因此成像器的空间分辨率由SiPM的数量而不是微单元的数量决定。与SPAD阵列相比,SiPM阵列通常具有较低的空间分辨率,但每个像素都是光子数分辨的(由许多SPAD组成)。
下图比较了不同探测器技术在时间分辨率、灵敏度和像素数量方面的差异。事实上,时间分辨率是脉冲激光雷达测量光子到达时间的关键参数;灵敏度在激光能量有限(人眼安全)的远距离测量(尤其是低反射率目标)中起着至关重要的作用;像素数量会影响FOV、角度分辨率和测量速度,以便在不需要扫描单元的基础上实现Flash-LiDAR。
关于时间分辨率(下图横轴),我们将探测器分为三类:无定时能力的探测器(光子在相对较长的采集时间内积累,大约几十微秒);时间门控探测器(光子仅在几纳秒的明确定义的短时间窗口内积累);时间戳探测器(与 TDC 耦合,直接对光子到达时间进行时间戳)。
关于灵敏度(下图纵轴),我们将探测器分为对许多入射光子敏感的探测器(例如,最小可检测信号为数百个光子)、对少数光子敏感的探测器(例如,最小可检测信号为几十个光子)和对单个光子敏感的探测器(即最小可检测信号为一个光子)。
下图通过颜色标度显示了典型探测器的可用像素数:单像素探测器为红色;数十或数百像素的探测器阵列分别以黄色和橙色显示;千像素或百万像素成像仪采用不同色调的绿色。
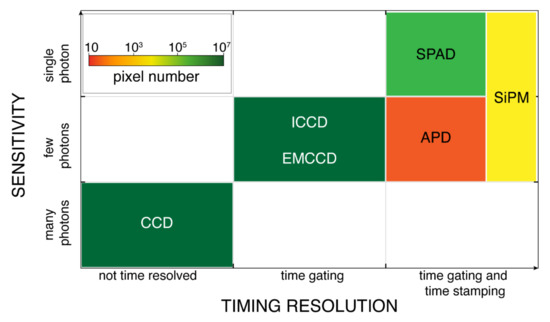
图11 适用于 LiDAR 的探测器,按时间分辨率、灵敏度和像素数进行比较
对于脉冲激光雷达来说,同时具有时间门控和时间戳记功能的探测器(例如APD、SPAD和SiPM)是首选;其中,只有SPAD和SiPM具有单光子灵敏度。此外,大型APD阵列的设计至关重要,因为APD需要专用技术、大像素间距、快速模拟前端和高压操作。相反,基于 SPAD 阵列或由大量 SPAD 并行组成的 SiPM 的成像仪易于部署,并且已被许多研究小组和公司报道。
单光子灵敏度在远距离应用中尤为重要,实际上到达探测器像素的光子数量取决于距离的平方倒数,以及光学参数(光源功率和发散度、物镜f 数和镜头衰减)、目标反射率和探测器几何形状(填充因子和像素面积)。
每个 SPAD 连接到独立的传感(可能还有处理)电子设备,从而充当 SPAD 阵列的一个像素;或者,多个 SPAD 可以组合在一起,共享一个公共处理电子设备(例如,TDC),从而形成 SiPM 阵列的像素。换句话说,在 SPAD 阵列中,每个像素仅包含一个 SPAD(因此在 LiDAR 应用中实现了较窄的角分辨率),而在 SiPM 阵列中,每个像素(定义为提供空间信息的最小独立单元)包含多个 SPAD(微单元),从而限制(扩大)了角分辨率。
与 SPAD 阵列相比,SiPM 阵列能够检测同一像素内的重合光子(它们同时提供单光子和少光子灵敏度),从而实现单次 LiDAR 。在许多情况下,SPAD 阵列和 SiPM 阵列之间的分类并不简单,因为经常提出中间解决方案来利用 SPAD 阵列(精细角分辨率)和 SiPM 阵列(单光子和多光子灵敏度)的优势。
综上所述,SPAD 和 SiPM 阵列凭借其精细的时间分辨率、高灵敏度和相对较大的像素数量,可以成为脉冲激光雷达 (LiDAR) 的最佳候选阵列。
8、Lidar 接收器行业梳理
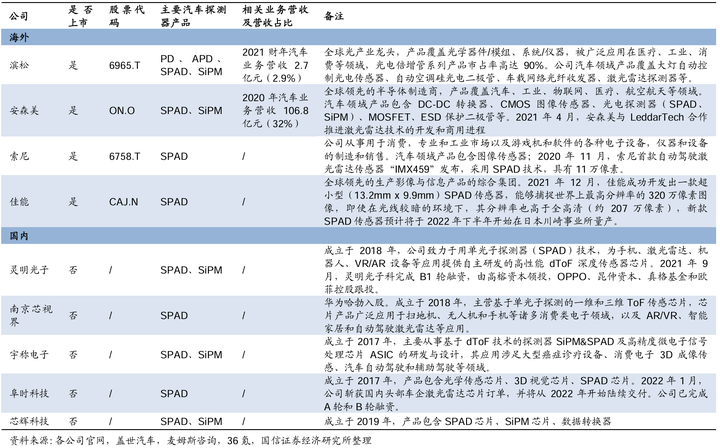
图12 激光雷达探测器厂家汇总









评论前必须登录!
注册