 网硕互联帮助中心
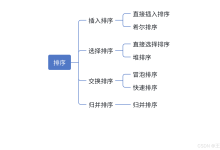
网硕互联帮助中心快速排序
三路快排:原理介绍(高效处理重复数据)
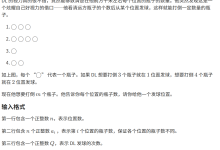
在学习快速排序的分区(partition)操作前,我们可以思考这样一个问题:
给定一个数组:[2, 7, 6, 1, 4, 5, 2, 3]
我们希望选择一个基准值(pivot),比如选最右边的元素 3,然后对数组进行重新排列,使得:
- 所有 小于 3 的元素放在数组的左边;
- 所有 等于 3 的元素放在中间;
- 所有 大于 3 的元素放在右边。
这种划分方式称为 三路划分(3-way partitioning),特别适合处理包含大量重复元素的数组。
为了实现这一目标,我们可以使用 三个指针(或区间边界) 来维护三个区域:
- lt:指向“小于区”的右边界(即小于 pivot 的最后一个位置)
- gt:指向“大于区”的左边界(即大于 pivot 的第一个位置)
- i:当前遍历指针,从左到右扫描数组
初始时:
- lt = -1(表示小于区为空)
- gt = n(即 gt = 8,表示大于区从索引 8 开始,也为空)
- i = 0(从第一个元素开始遍历)
我们以 pivot = 3 为例,开始遍历(i < gt 时继续):
遍历规则如下:
如果 arr[i] < pivot:
- 将 arr[i] 与 arr[lt + 1] 交换(扩展小于区)
- lt++
- i++
如果 arr[i] == pivot:
- 不需要交换,直接 i++(保留在中间区域)
如果 arr[i] > pivot:
- 将 arr[i] 与 arr[gt – 1] 交换(扩展大于区)
- gt–
- 注意:此时 i 不增加,因为从右边换过来的新元素还未检查!
举例说明:
初始数组:[2, 7, 6, 1, 4, 5, 2, 3],pivot = 3
经过三路划分后,数组可能变成类似: [2, 1, 2, 3, 7, 6, 5, 4]
(前面是 <3 的,中间是 =3 的,后面是 >3 的)
最终,lt 和 gt 之间的元素就是所有等于 pivot 的值,可用于后续递归处理左右两部分。
我们刚才完成的操作,称为 分区(Partition)。
它的核心作用是:给定一个数组和一个基准值(pivot),通过重新排列,将数组划分为三个连续的区域:
- 左侧:所有 小于 pivot 的元素
- 中间:所有 等于 pivot 的元素
- 右侧:所有 大于 pivot 的元素
这一过程完成后,中间区域(即所有等于 pivot 的元素)就已经处于最终排序位置,无需再次调整。我们只需递归地对左侧的“小于区”和右侧的“大于区”重复相同的分区操作,就能逐步使整个数组有序。
试想,如果我们对左边的“小于区”也选择一个新的基准值,进行同样的三路分区;
同时对右边的“大于区”也如此处理;
那么每一层操作都在将问题分解为更小的子问题。
随着递归不断深入,子数组的规模逐渐缩小,直到某个子数组长度为 0 或 1 —— 此时已自然有序。
当所有递归调用逐层返回时,整个数组也就完成了排序。
代码实现
#include <stdio.h>
void swap(int *a, int *b)
{
int temp = *a;
*a = *b;
*b = temp;
}
void quickSort(int *nums, int low, int high)
{
if (low >= high)
return;
int pivot = nums[low];
int lt = low;
int gt = high;
int i = low + 1;
while (i <= gt){
if (nums[i] < pivot){
swap(&nums[lt], &nums[i]);
lt++;
i++;
}
else if (nums[i] > pivot){
swap(&nums[gt], &nums[i]);
gt–;
// 这里 i 不增加,因为还没有比较换过来的数的大小
}
else{
i++;
}
}
quickSort(nums, low, lt – 1);
quickSort(nums, gt + 1, high);
}
int main()
{
int nums[] = {4,3,2,2,5,6,7,5,3,3,2,1,4};
int len = sizeof(nums) / sizeof(int);
// 快速排序
quickSort(nums, 0, len – 1);
// 打印输出
for (int i = 0; i < len; i++){
printf("%d ", nums[i]);
}
return 0;
}
双边扫描快排:原理介绍(通用简洁写法)
这是一种通用、直观、广泛流传的快速排序实现,适合大多数情况。虽然在大量重复元素下不如三路快排高效,但代码简洁,易于理解和教学。
选择最左侧元素作为 pivot,使用两个指针 left 和 right 从数组两端向中间扫描:
- right 从右向左找第一个小于 pivot 的元素
- left 从左向右找第一个大于 pivot 的元素
- 找到后交换两者位置
- 直到 left >= right
循环结束后,left(或 right)指向的位置就是 pivot 的最终位置。将 nums[left] 与 nums[low](原始 pivot)交换,完成分区。
随后递归处理 left 左右两个子数组。
代码实现
#include <stdio.h>
void swap(int *a, int *b)
{
int temp = *a;
*a = *b;
*b = temp;
}
void quickSort(int *nums, int low, int high)
{
if (low >= high)
return;
int pivot = nums[low];
int left = low;
int right = high;
while (left < right){
while (left < right && nums[right] >= pivot)
right–;
while (left < right && nums[left] <= pivot)
left++;
if (left < right)
swap(&nums[left], &nums[right]);
}
swap(&nums[left], &nums[low]);
quickSort(nums, low, left – 1);
quickSort(nums, left + 1, high);
}
int main()
{
int nums[] = {2, 7, 6, 1, 4, 5, 2, 3};
int len = sizeof(nums) / sizeof(int);
// 快速排序
quickSort(nums, 0, len – 1);
for (int i = 0; i < len; i++)
printf("%d ", nums[i]);
return 0;
}
两种实现快排方法的对比

优化方案
前面介绍的两种快排写法,基准值都是固定选的(比如选第一个或最后一个元素)。这种做法在大多数情况下效率很高,但如果遇到已经有序或者特定排列的数据,每次划分都极不均衡,就会导致性能急剧下降,最坏时间复杂度退化到 O(n²)。
为了避免这种情况,我们可以改进基准值的选择方式,让算法更“聪明”、更稳定。常用的优化方法有:
- 三数取中:取数组的第一个、中间的和最后一个元素,选其中的中位数作为基准,避免极端情况。
- 随机选基准:随机从数组中选一个元素作为基准,用随机性来对抗坏数据。



评论前必须登录!
注册