 网硕互联帮助中心
网硕互联帮助中心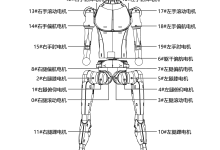
宇树H1人形机器人强化学习控制RL例程复现
Unitree RL GYM Unitree RL GYM 是一个基于 Unitree 机器人平台和Isaac Gym仿真的强化学习示例仓库,支...
Unitree RL GYM Unitree RL GYM 是一个基于 Unitree 机器人平台和Isaac Gym仿真的强化学习示例仓库,支...
7.3 驱动器开发与控制接口 驱动器是人形机器人关节的“大脑和神经”,承担电机驱动、传感器反馈处理及实时通信的关键任务。在本节将从电机驱动电路...

7.2 执行器封装与一体化设计人形机器人关节执行器不仅是扭矩/转速的动力来源,也是整体结构、控制和散热的核心单元。在本节将重点探讨执行器的一体化...
4.2 减速器与传动机构减速器与传动机构是人形机器人关节动力传递的核心环节,核心作用是将电机的“高速低扭矩”转化为关节所需的“低速大扭矩”&#x...
本章首先系统介绍了人形机器人的发展脉络,从早期仿人研究到ASIMO等里程碑事件,再到特斯拉、Figure、宇树等企业推动的商业化进程...
