 网硕互联帮助中心
网硕互联帮助中心一、坐标系
1.常用坐标系介绍
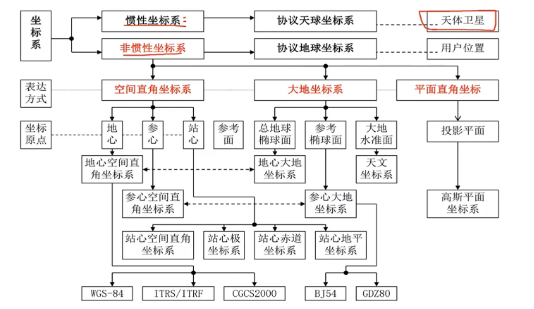
GPS:WGS84坐标系
中国:CGCS2000
2.站心空间直角坐标系(北东天)
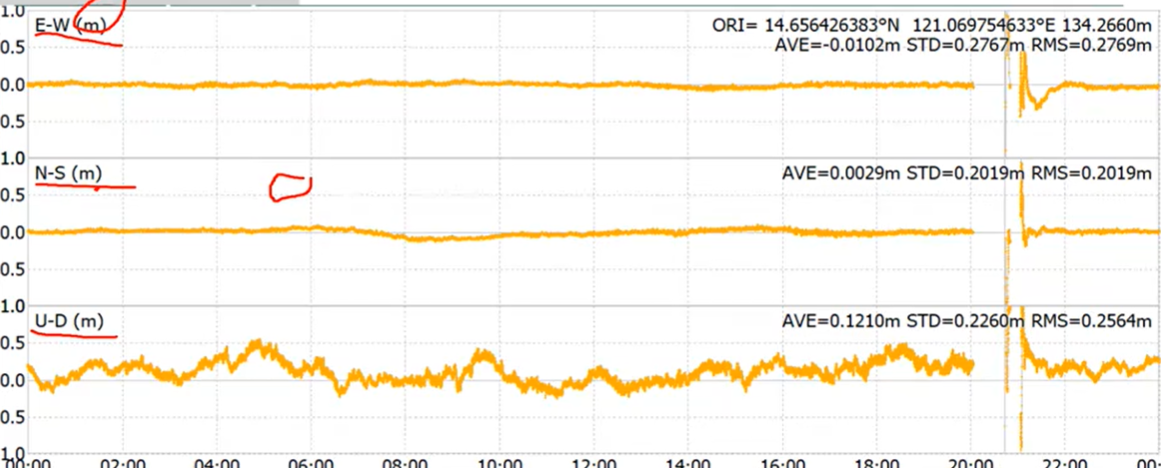
用来直观感受东北天方向的定位误差
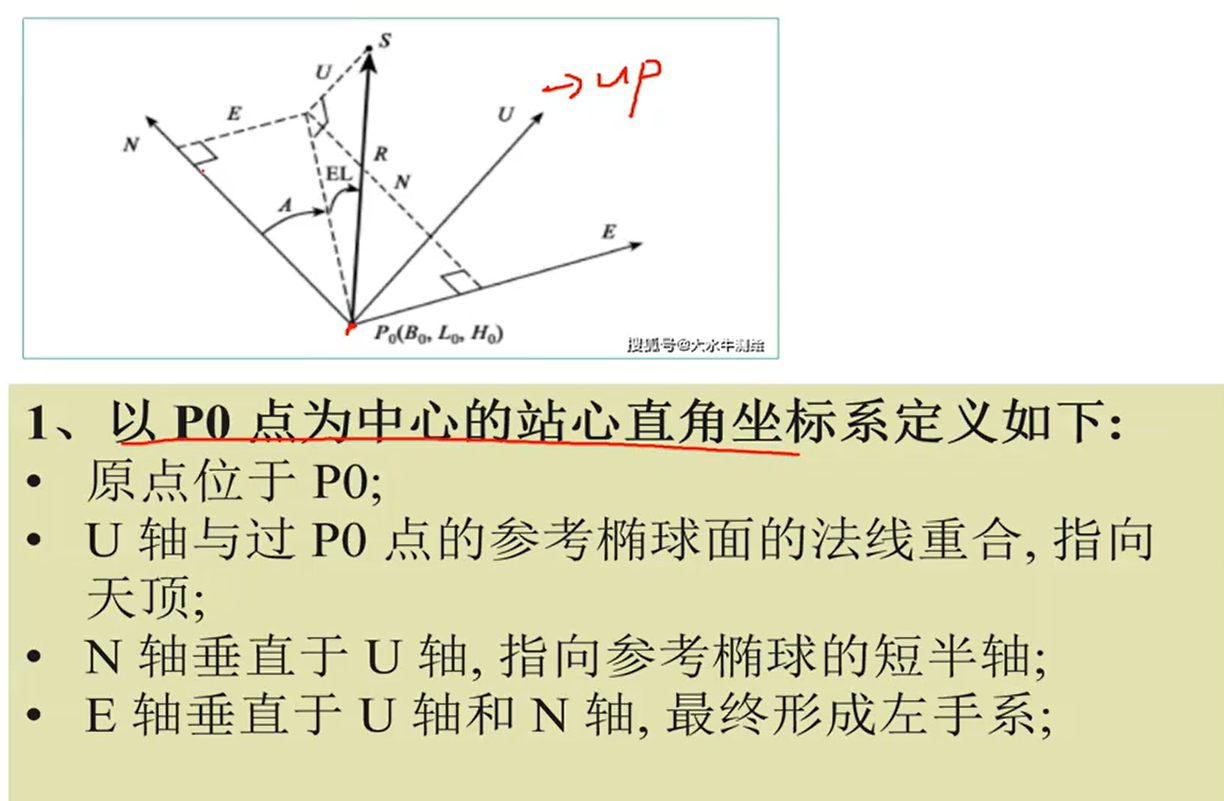
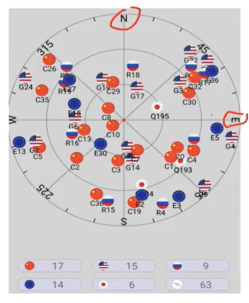
3.站心极坐标系
以 P0 点为中心的站心极坐标系定义如下:
- NPOE 平面为基准面;
- 极点位于 P0;
- 极轴为 N 轴;
▶ 百度地图、遥感影像直接提取的坐标属于哪个坐标系?
▶ GNSS 定位解算输出的坐标系是属于哪个坐标系?
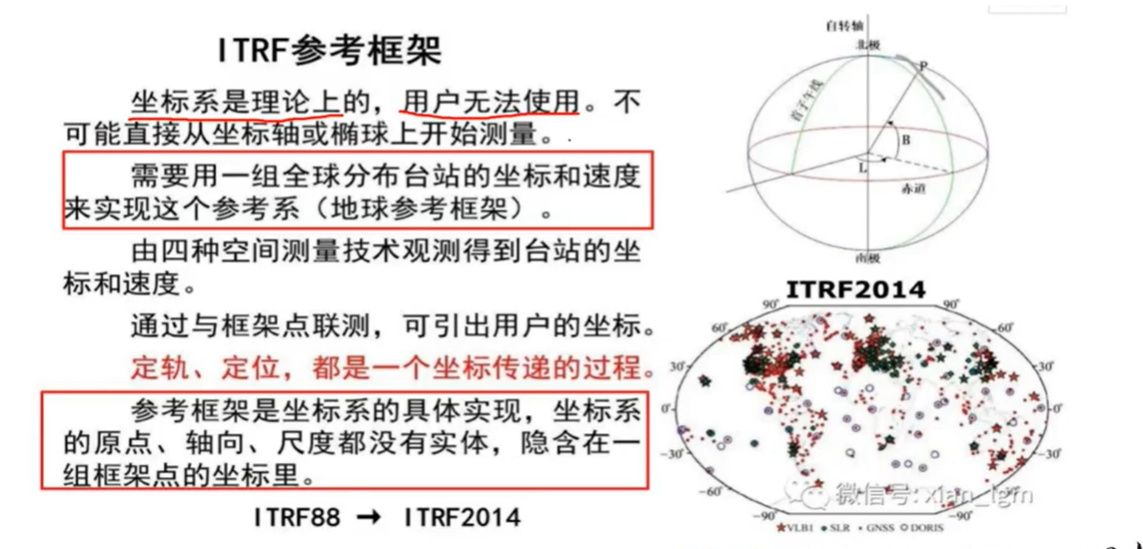
CGCS2000是2000国家大地坐标系,属于地心大地坐标系统,该系统以ITRF 97 参考框架为基准,参考框架历元为2000.0。
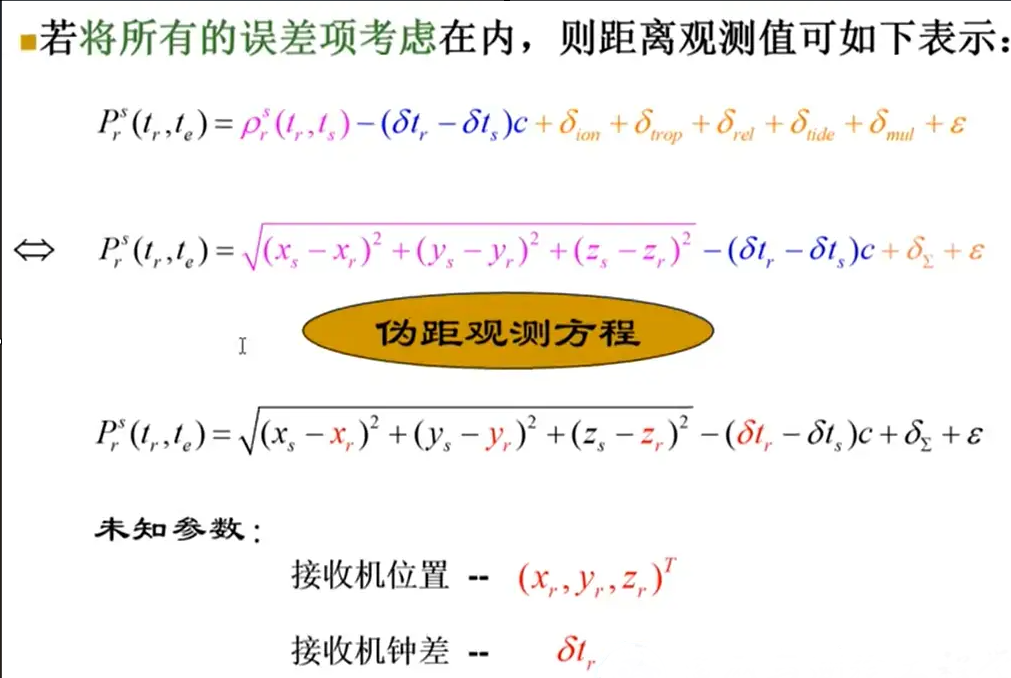
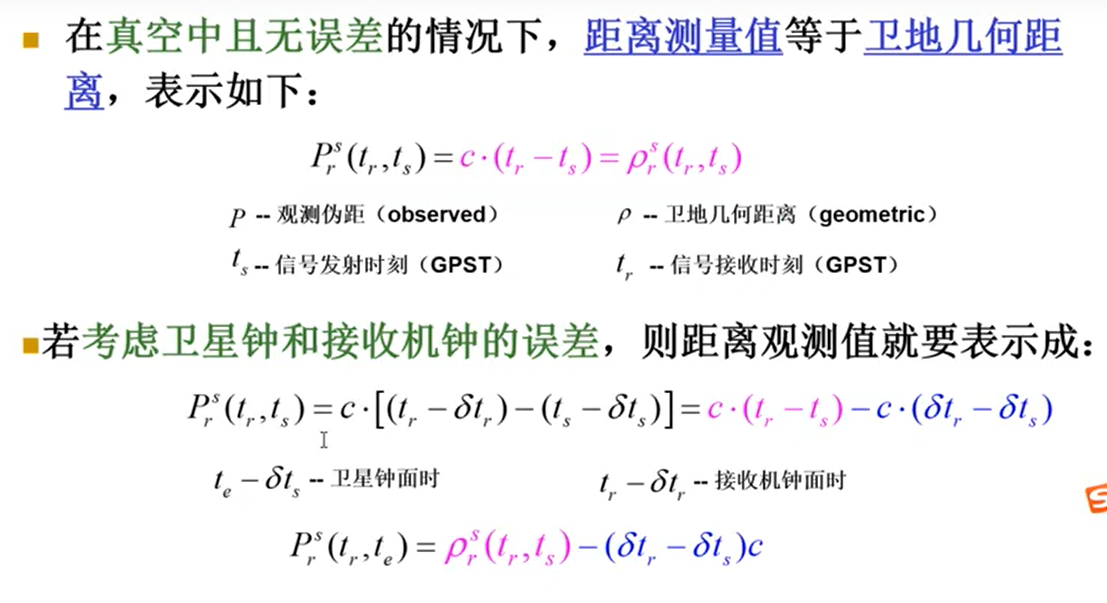
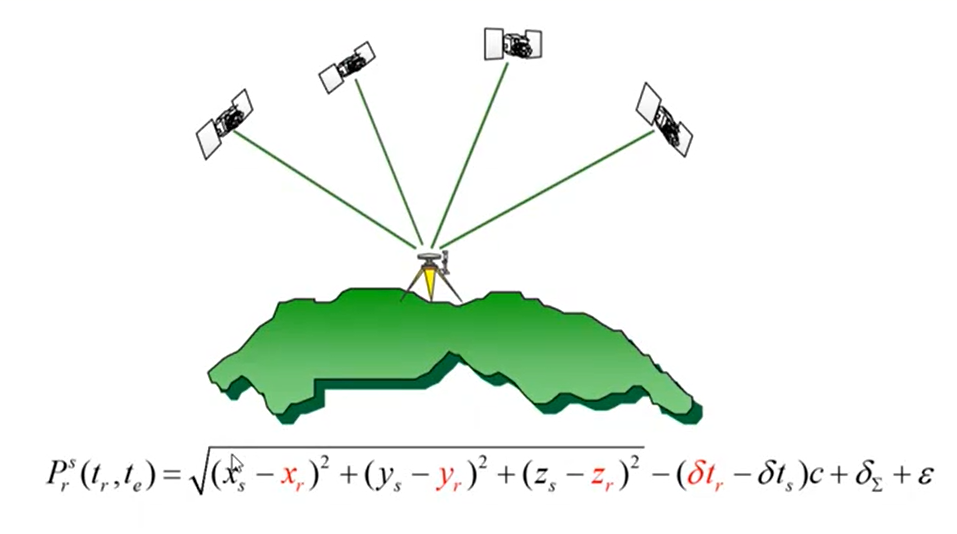
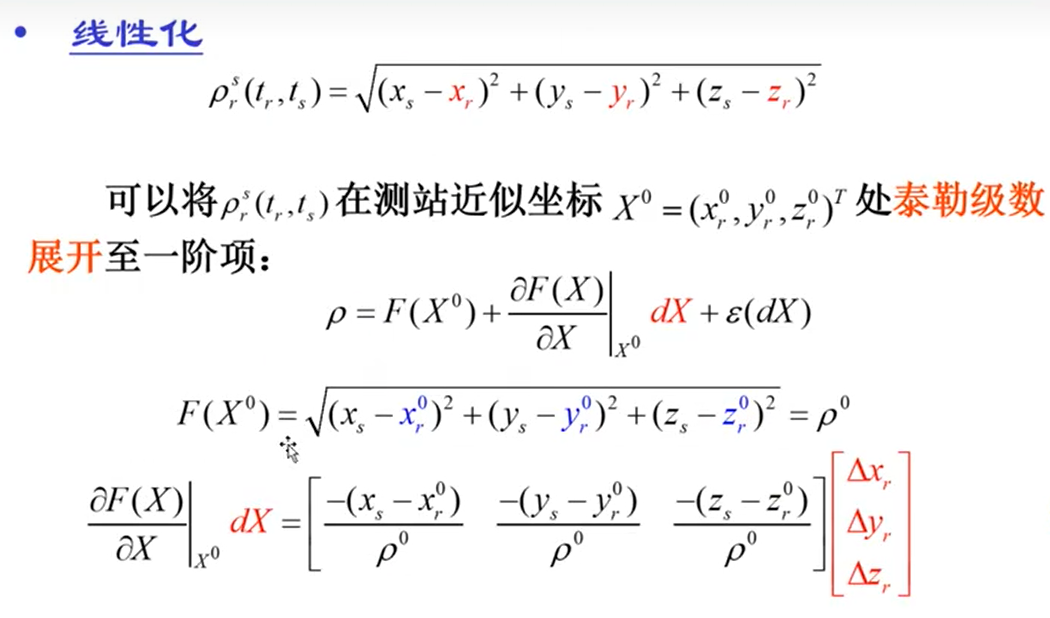
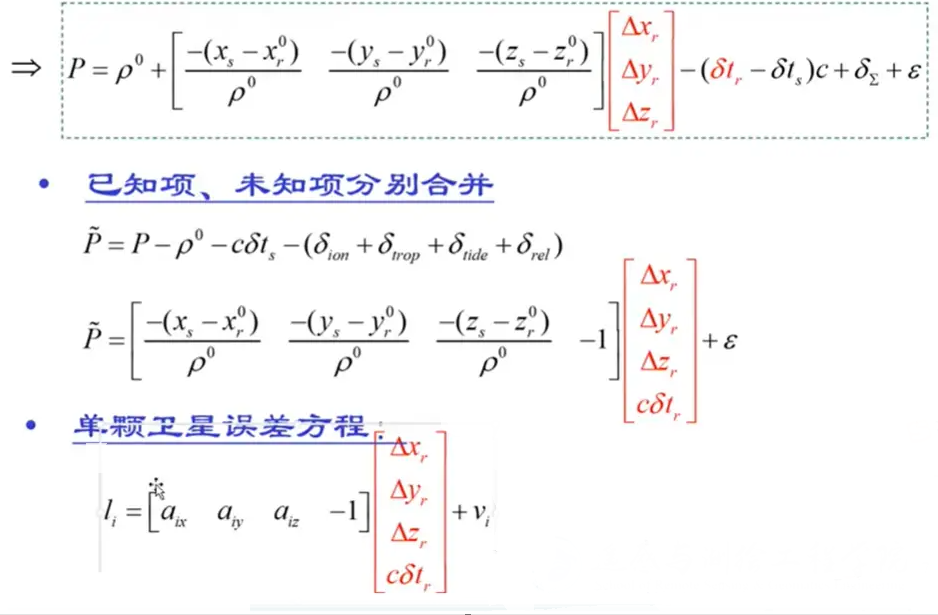
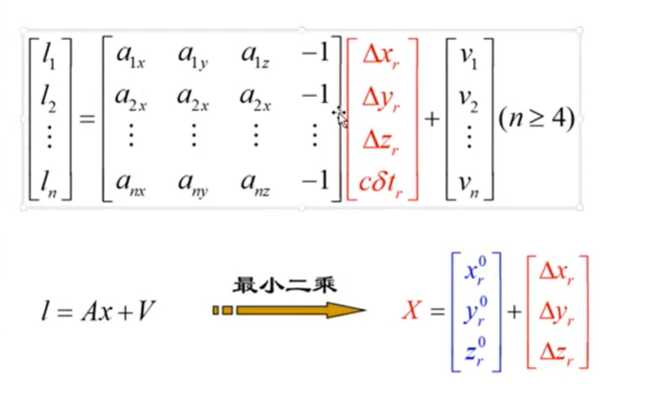
二、伪距单点定位(SPP)
三、PPP
1. 定位原理与精度
- SPP(单点定位,Standalone Positioning)直接利用单台接收机观测到的伪距观测值,结合广播星历(卫星轨道和钟差的粗略参数)进行定位。
- 精度:米级(通常 5-10 米,受电离层、对流层、卫星钟差等误差影响较大)。
- 特点:无需额外数据,计算简单,实时性强(开机即可定位)。
- PPP(精密单点定位,Precise Point Positioning)利用单台接收机的伪距和载波相位观测值,结合高精度的卫星轨道、钟差产品(如 IGS 提供的精密星历),通过建模消除或削弱电离层、对流层等误差,同时解算载波相位的整周模糊度。
- 精度:静态定位可达厘米级,动态定位可达分米级(取决于观测时间和环境)。
- 特点:依赖外部精密数据,计算复杂,需要一定时间收敛(通常几分钟到几十分钟)。
2. 数据依赖与处理复杂度
- SPP
- 仅需接收机自身观测数据 + 卫星广播星历(实时获取,精度低)。
- 数据处理简单,无需解算整周模糊度,实时输出结果。
- PPP
- 需接收机观测数据 + 高精度外部数据(精密星历、钟差、电离层模型等,通常来自 IGS 等机构,延迟或实时播发)。
- 需处理载波相位整周模糊度、大气延迟等误差,算法复杂,需要更长时间的观测数据收敛到稳定精度。
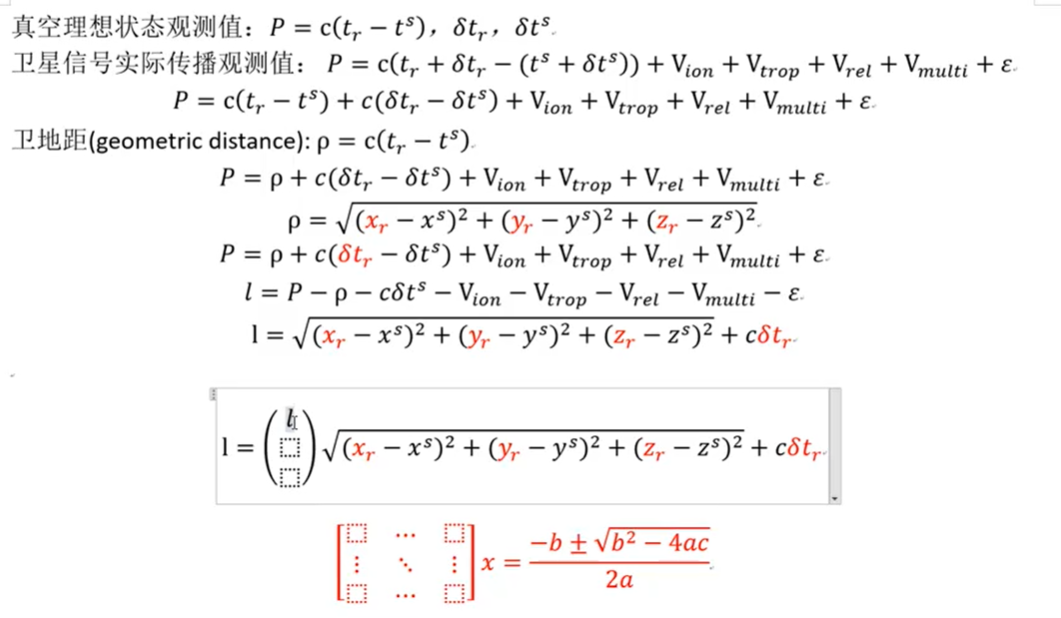
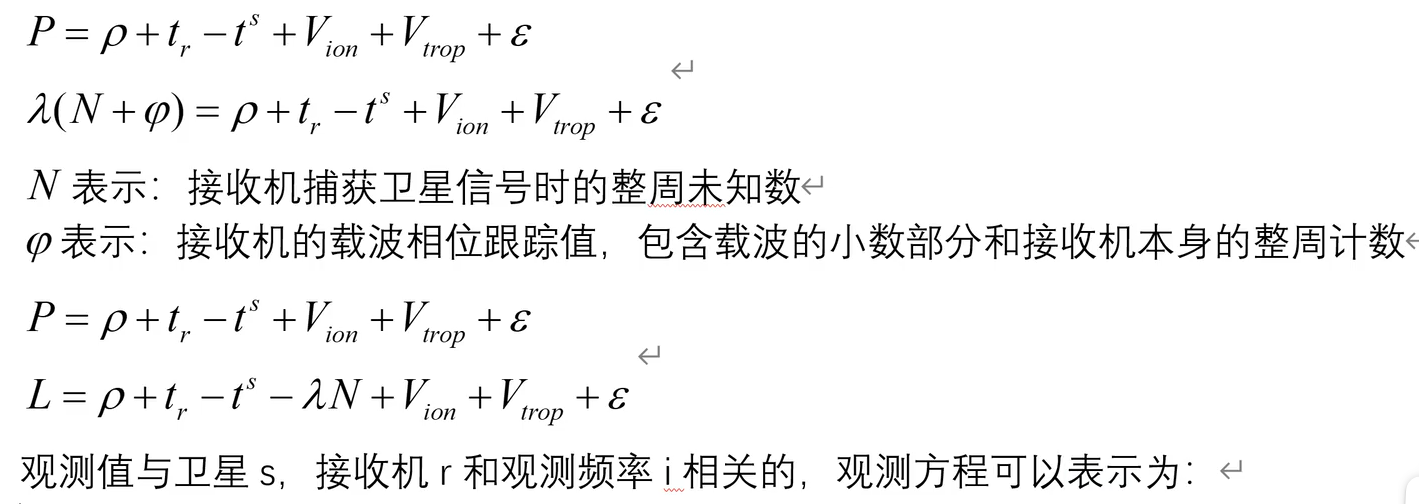
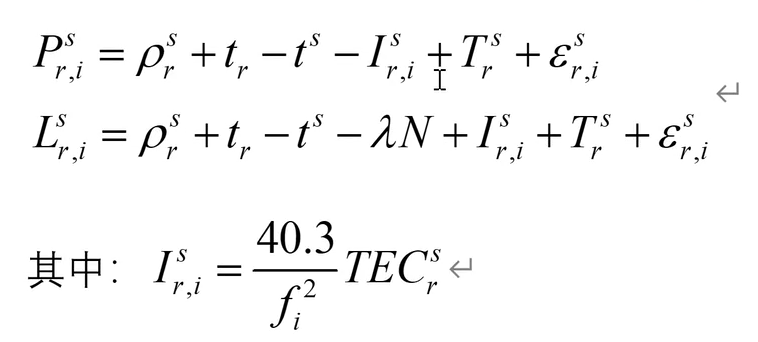
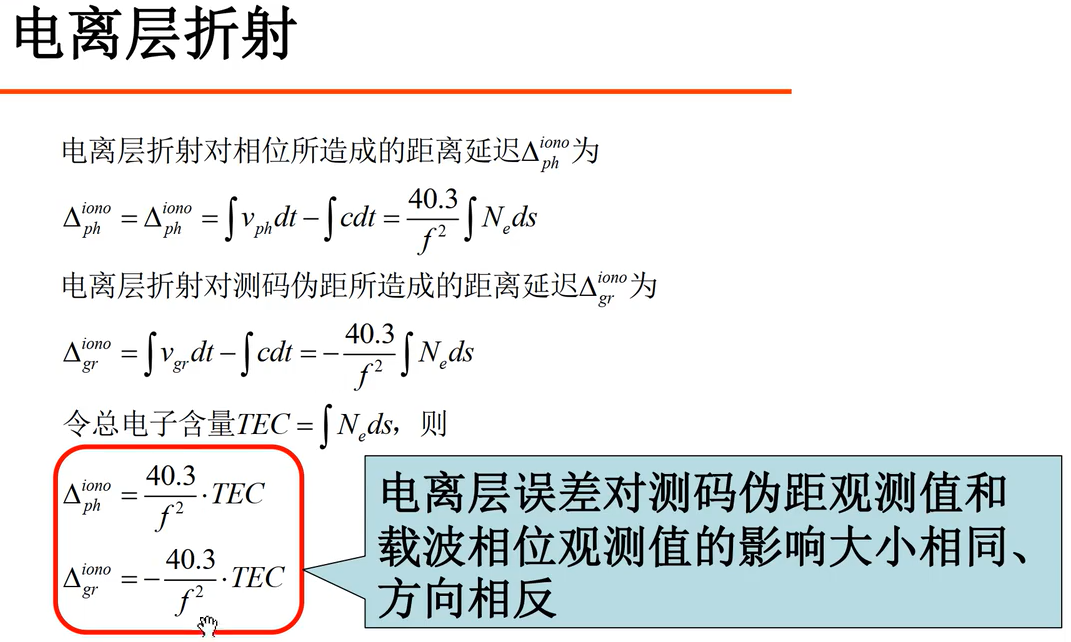
伪距观测值P和载波相位观测值L分别表示为:







评论前必须登录!
注册