 网硕互联帮助中心
网硕互联帮助中心在当今交通网络日益发达的时代,涵洞隧道作为交通基础设施的关键组成部分,其重要性不言而喻。它们宛如城市脉络中的隐秘通道,保障着车辆与行人的顺畅通行。而在隧道等基建施工建设过程中,工程质量监管是重中之重,直接关系到基础设施的长期安全与稳定运行。其中,盾构机在盾构前进时自动进行隧道管片的铺设与固定,这一环节尤为关键。然而,若操作不当,随着时间推移,管片体上可能会出现缺陷损伤等问题,给基建安全埋下隐患。传统的安全巡检运维模式,在应对这些挑战时逐渐显露出诸多弊端,而AI智能化技术的融入,正为盾构隧道巡检带来全新的变革与希望。
传统巡检:人力之困与效率之限
传统的盾构隧道安全巡检运维模式,主要依赖组织专业的巡检运维团队,开展例行化的巡查工作。一旦发现问题,便及时进行修补处理。这种模式在过去的基建维护中发挥了一定作用,但随着时代的发展,其局限性日益凸显。
一方面,完全依赖人力的方式成本高昂。培养一支专业化的巡检团队需要投入大量的资源,包括时间、资金和精力。从人员的招聘、培训到技能提升,每一个环节都需要精心打造。而且,随着基础设施规模的不断扩大,对巡检人员数量的需求也在增加,这进一步加重了人力成本负担。
另一方面,传统巡检难以做到快速高效且全天候工作。人工巡检受到工作时间、身体状况和环境条件等多种因素的限制,无法实现对隧道的实时、不间断监测。对于一些隐蔽性较强的缺陷损伤病害问题,人工巡检可能难以及时有效发现,导致问题在不知不觉中恶化,给基建安全带来严重威胁。
AI入局:智能巡检的新曙光
随着AI智能化技术的飞速发展,越来越多的传统行业开始借助这一强大力量实现转型升级,盾构隧道巡检领域也不例外。AI技术的融入,为解决传统巡检模式的难题提供了新的思路和方法。
在盾构隧道巡检场景下,借助滑轨机器人、机器狗、无人机等机械设备实现循轨巡检成为可能。这些智能设备具有灵活性强、适应性好等优点,能够代替传统人工进行快速巡检。它们可以沿着预设的轨道或路线,在隧道内自由穿梭,深入到人工难以到达的区域,采集广泛丰富的图像数据。这些数据为后续的智能化检测识别模型的构建提供了坚实的基础。
通过对采集到的图像数据进行标注和开发,可以构建出智能化的检测识别模型。这个模型就像是一个拥有敏锐“眼睛”和聪明“大脑”的巡检专家,能够对设备端采集捕获的视频流数据进行实时检测。一旦发现问题,模型会立即触发自动预警信息发送机制,将问题信息及时传递给专业的团队进行确认。一旦确认问题确实存在,便迅速指派对应的专业团队进行处理。这种智能化的巡检方式,大大提升了工作效率,实现了精准作业。
智能巡检:优势尽显与价值凸显
AI赋能的盾构隧道智能巡检模式,相较于传统模式具有诸多显著优势。
在效率方面,智能巡检实现了快速、高效的全天候监测。智能设备可以不知疲倦地工作,不受时间和环境的限制,能够实时捕捉隧道内的各种变化。与人工巡检相比,大大缩短了巡检周期,提高了巡检频率,能够及时发现潜在的安全隐患。
在成本方面,虽然智能设备的购置和初期投入可能较高,但从长远来看,其运行成本相对较低。智能设备不需要支付高额的人工薪酬和培训费用,而且能够减少因人为因素导致的误检和漏检,降低了后续的维修成本和安全风险。
在精准度方面,智能化检测识别模型具有高度的准确性和可靠性。它能够通过对大量数据的学习和分析,识别出各种细微的缺陷损伤病害问题,避免了人工巡检中可能出现的疏忽和误判。同时,自动预警信息发送机制能够确保问题得到及时处理,防止问题的进一步恶化。
在前面的博文中,我们已经进行了相关的开发实践,感兴趣的话可以自行移步阅读即可:
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv5全系列【n/s/m/l/x】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv6全系列【n/s/m/l】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv7全系列【tiny/yolov7/yolov7x】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv8全系列【n/s/m/l/x】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv9全系列【yolov9/t/s/m/c/e】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv10全系列【n/s/m/b/l/x】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
《AI赋能盾构隧道巡检开启基建安全新篇章,基于YOLOv11全系列【n/s/m/l/x】参数模型开发构建AI隧道盾构场景下盾构管壁缺陷病害异常检测预警系统》
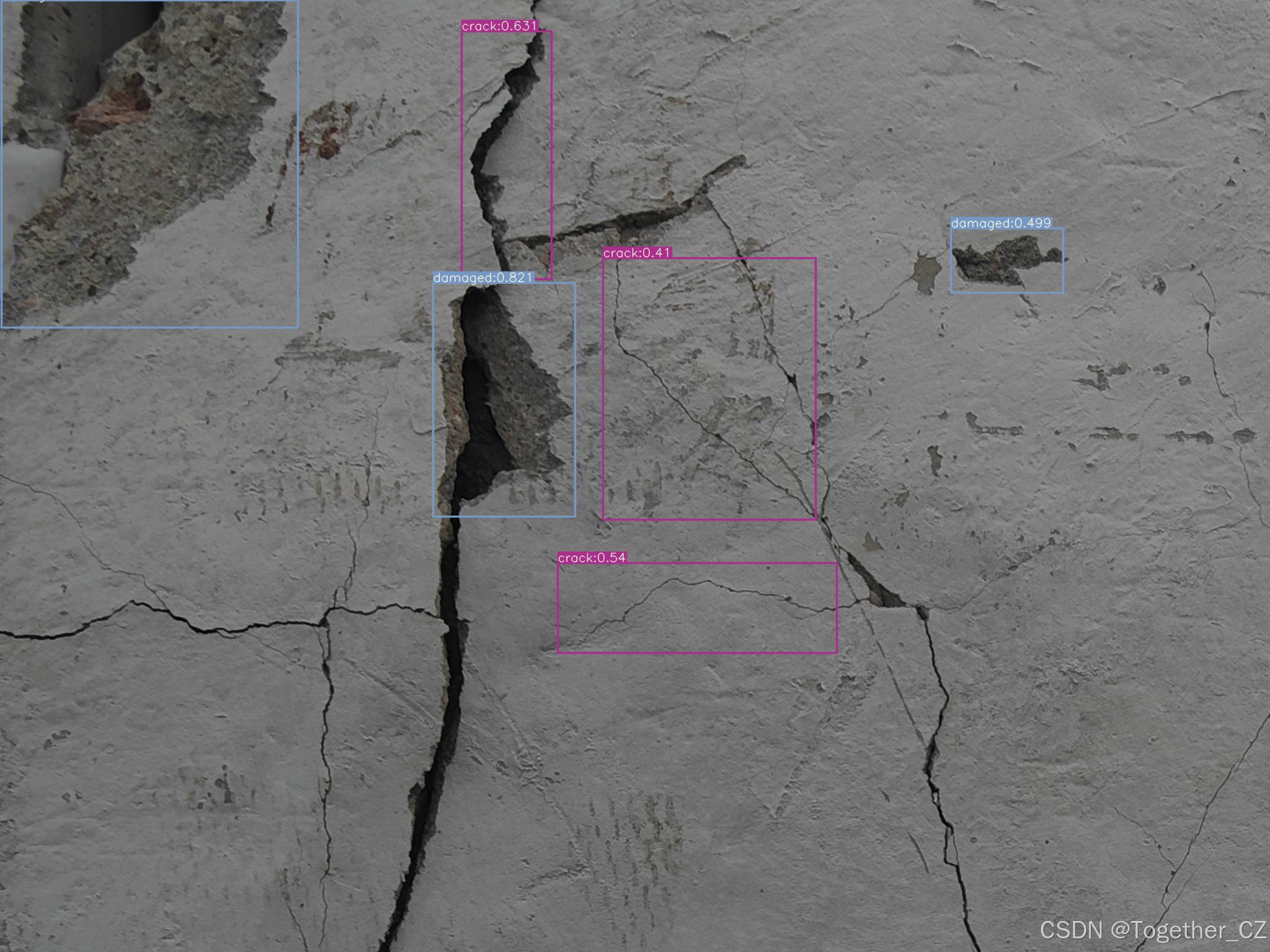
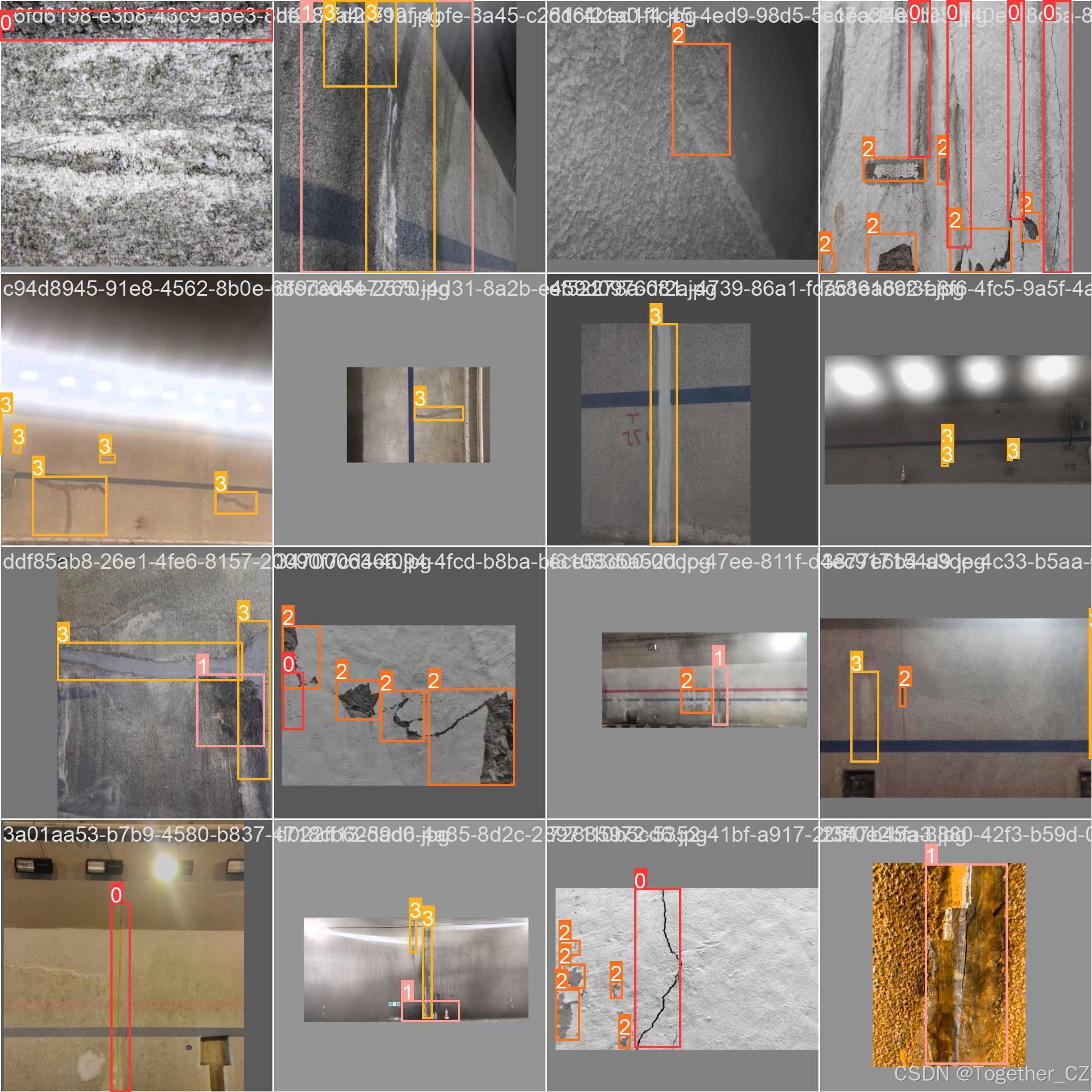
本文主要是想要基于YOLOv12系列的模型来进行相应的开发实践,首先看下实例效果:

简单看下数据集实例:
YOLO系列最近的迭代速度不可谓不快,可能感觉YOLOv11都还没有推出多久,YOLOv12就这么水灵灵地来了,下面是对YOLOv12论文的阅读记录,感兴趣的话可以自行移步阅读即可:
《卷出火花继续飞升,YOLO家族最新成员YOLOv12重磅发布——YOLOv12: Attention-Centric Real-Time Object Detectors以注意力为中心的实时目标检测器》
官方发布的预训练权重如下:
Turbo (default):
| YOLO12n | 640 | 40.4 | 1.60 | 2.5 | 6.0 |
| YOLO12s | 640 | 47.6 | 2.42 | 9.1 | 19.4 |
| YOLO12m | 640 | 52.5 | 4.27 | 19.6 | 59.8 |
| YOLO12l | 640 | 53.8 | 5.83 | 26.5 | 82.4 |
| YOLO12x | 640 | 55.4 | 10.38 | 59.3 | 184.6 |
v1.0:
| YOLO12n | 640 | 40.6 | 1.64 | 2.6 | 6.5 |
| YOLO12s | 640 | 48.0 | 2.61 | 9.3 | 21.4 |
| YOLO12m | 640 | 52.5 | 4.86 | 20.2 | 67.5 |
| YOLO12l | 640 | 53.7 | 6.77 | 26.4 | 88.9 |
| YOLO12x | 640 | 55.2 | 11.79 | 59.1 | 199.0 |
Instance segmentation:
| YOLOv12n-seg | 640 | 39.9 | 32.8 | 1.84 | 2.8 | 9.9 |
| YOLOv12s-seg | 640 | 47.5 | 38.6 | 2.84 | 9.8 | 33.4 |
| YOLOv12m-seg | 640 | 52.4 | 42.3 | 6.27 | 21.9 | 115.1 |
| YOLOv12l-seg | 640 | 54.0 | 43.2 | 7.61 | 28.8 | 137.7 |
| YOLOv12x-seg | 640 | 55.2 | 44.2 | 15.43 | 64.5 | 308.7 |
Classification:
| YOLOv12n-cls | 224 | 71.7 | 90.5 | 1.27 | 2.9 | 0.5 |
| YOLOv12s-cls | 224 | 76.4 | 93.3 | 1.52 | 7.2 | 1.5 |
| YOLOv12m-cls | 224 | 78.8 | 94.4 | 2.03 | 12.7 | 4.5 |
| YOLOv12l-cls | 224 | 79.5 | 94.5 | 2.73 | 16.8 | 6.2 |
| YOLOv12x-cls | 224 | 80.1 | 95.3 | 3.64 | 35.5 | 13.7 |
一共提供了n、s、m、l和x五款不同参数量级的模型。
这里我们保持完全相同的实验参数设置来进行四款模型的开发训练,等待训练完成之后我们来整体进行各项指标的对比分析。
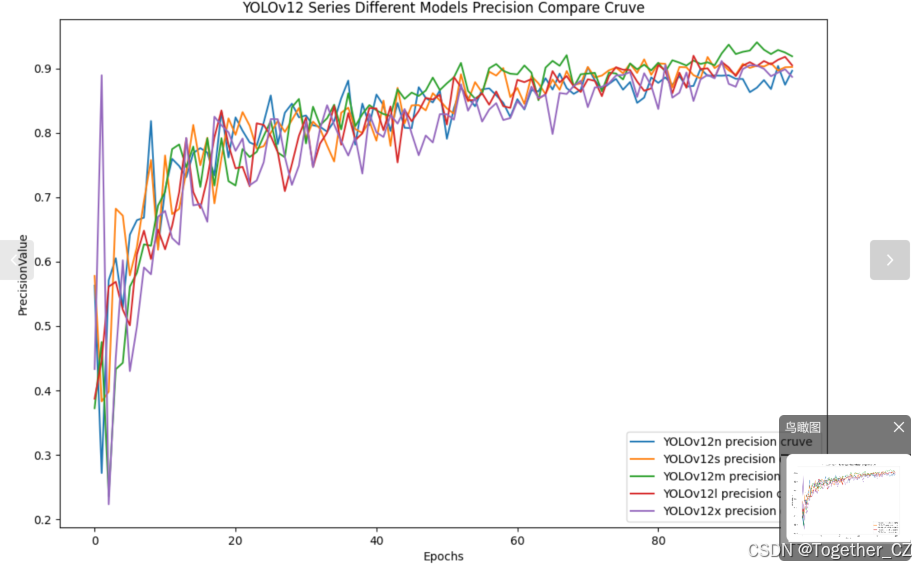
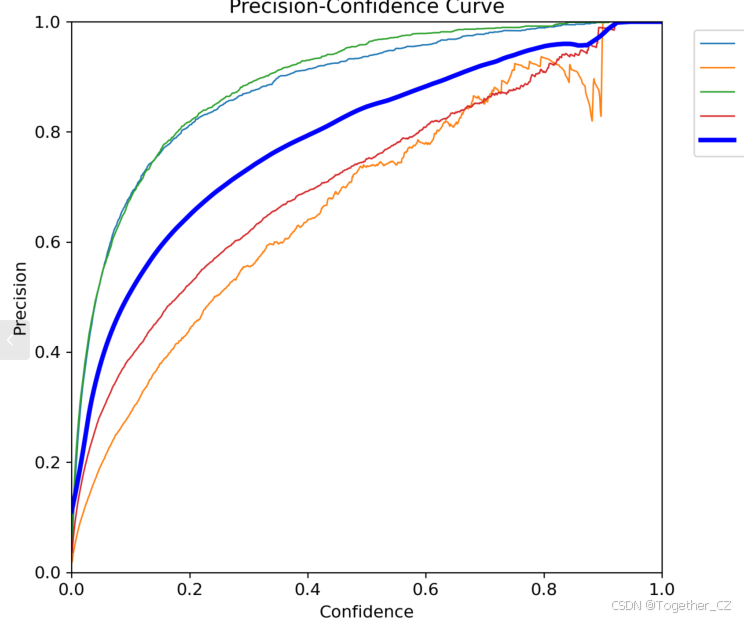
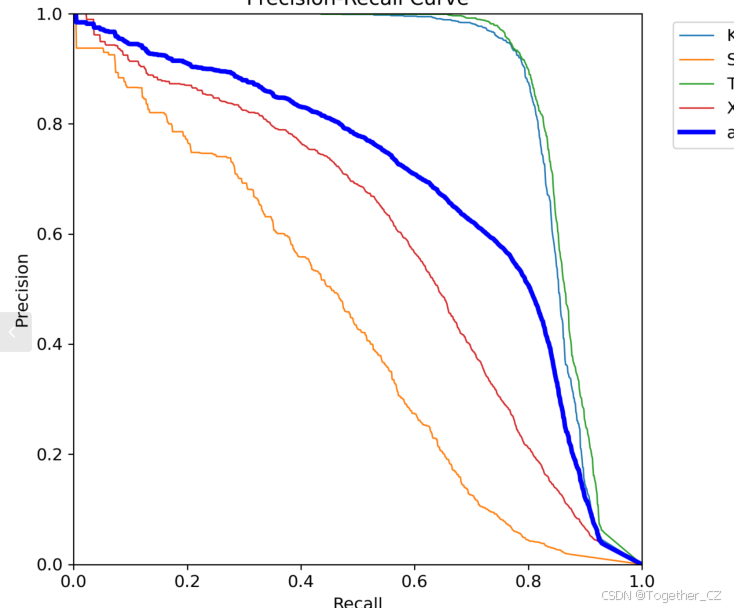
【Precision曲线】 精确率曲线(Precision Curve)是一种用于评估二分类模型在不同阈值下的精确率性能的可视化工具。它通过绘制不同阈值下的精确率和召回率之间的关系图来帮助我们了解模型在不同阈值下的表现。 精确率(Precision)是指被正确预测为正例的样本数占所有预测为正例的样本数的比例。召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。 绘制精确率曲线的步骤如下: 使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。 对于每个阈值,计算相应的精确率和召回率。 将每个阈值下的精确率和召回率绘制在同一个图表上,形成精确率曲线。 根据精确率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。 通过观察精确率曲线,我们可以根据需求确定最佳的阈值,以平衡精确率和召回率。较高的精确率意味着较少的误报,而较高的召回率则表示较少的漏报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。 精确率曲线通常与召回率曲线(Recall Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
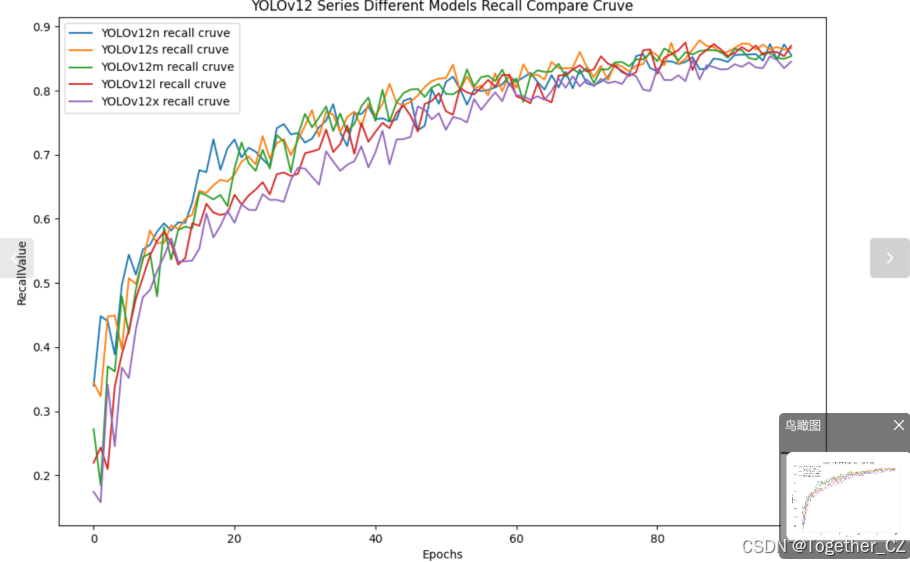
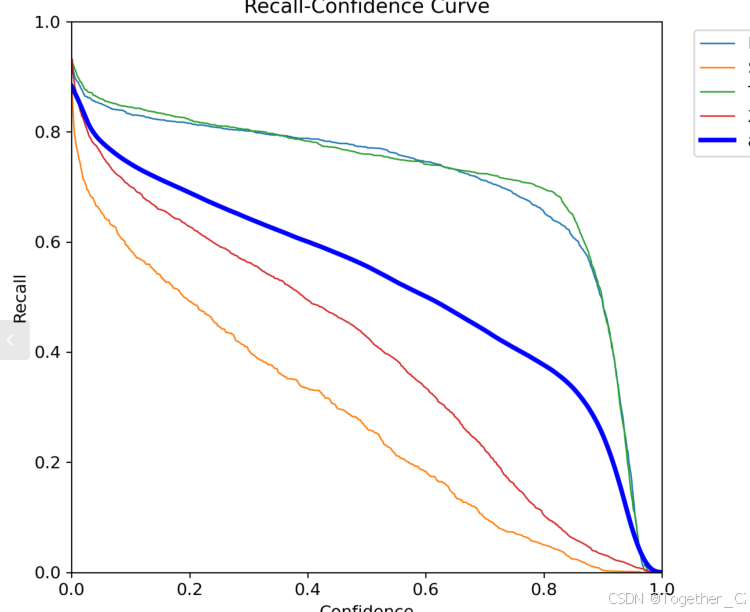
【Recall曲线】 召回率曲线(Recall Curve)是一种用于评估二分类模型在不同阈值下的召回率性能的可视化工具。它通过绘制不同阈值下的召回率和对应的精确率之间的关系图来帮助我们了解模型在不同阈值下的表现。 召回率(Recall)是指被正确预测为正例的样本数占所有实际为正例的样本数的比例。召回率也被称为灵敏度(Sensitivity)或真正例率(True Positive Rate)。 绘制召回率曲线的步骤如下: 使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。 对于每个阈值,计算相应的召回率和对应的精确率。 将每个阈值下的召回率和精确率绘制在同一个图表上,形成召回率曲线。 根据召回率曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。 通过观察召回率曲线,我们可以根据需求确定最佳的阈值,以平衡召回率和精确率。较高的召回率表示较少的漏报,而较高的精确率意味着较少的误报。根据具体的业务需求和成本权衡,可以在曲线上选择合适的操作点或阈值。 召回率曲线通常与精确率曲线(Precision Curve)一起使用,以提供更全面的分类器性能分析,并帮助评估和比较不同模型的性能。
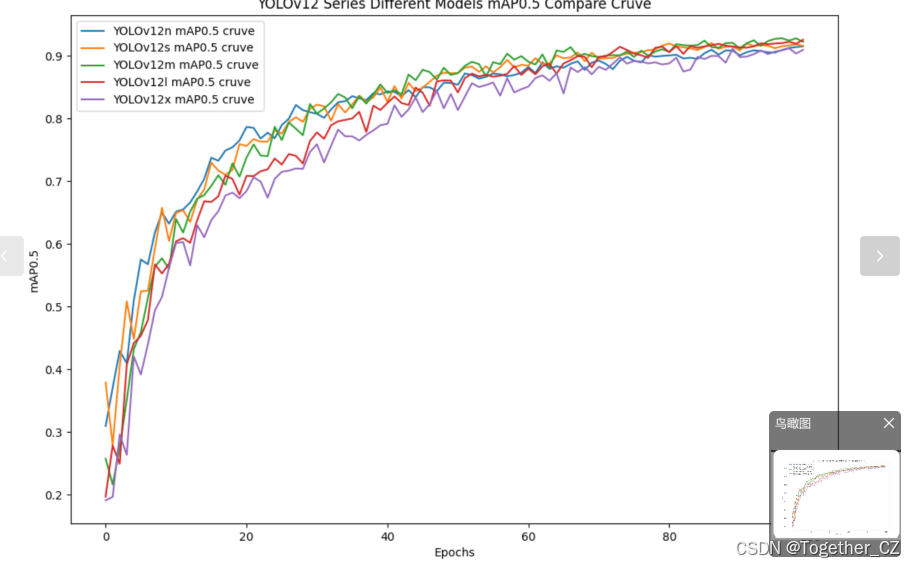
【mAP0.5】 mAP0.5,也被称为mAP@0.5或AP50,指的是当Intersection over Union(IoU)阈值为0.5时的平均精度(mean Average Precision)。IoU是一个用于衡量预测边界框与真实边界框之间重叠程度的指标,其值范围在0到1之间。当IoU值为0.5时,意味着预测框与真实框至少有50%的重叠部分。 在计算mAP0.5时,首先会为每个类别计算所有图片的AP(Average Precision),然后将所有类别的AP值求平均,得到mAP0.5。AP是Precision-Recall Curve曲线下面的面积,这个面积越大,说明AP的值越大,类别的检测精度就越高。 mAP0.5主要关注模型在IoU阈值为0.5时的性能,当mAP0.5的值很高时,说明算法能够准确检测到物体的位置,并且将其与真实标注框的IoU值超过了阈值0.5。
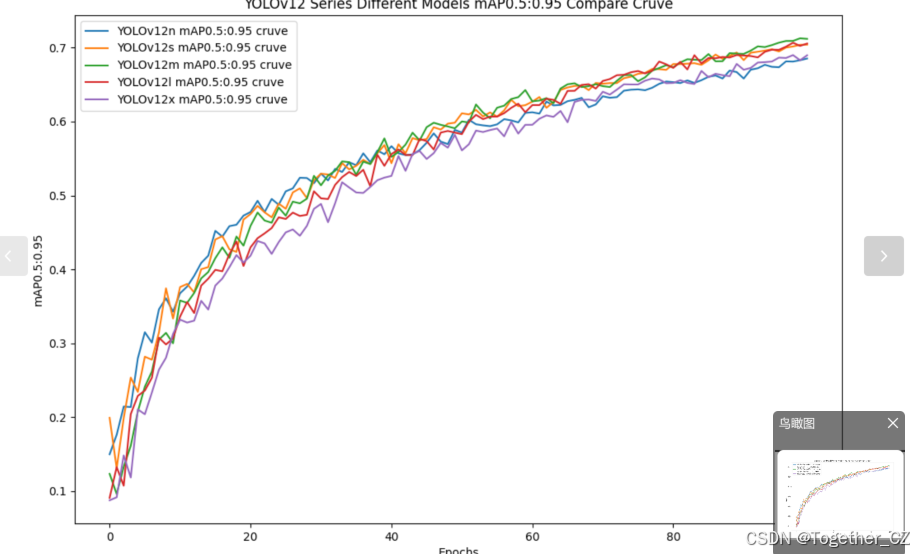
【mAP0.5:0.95】 mAP0.5:0.95,也被称为mAP@[0.5:0.95]或AP@[0.5:0.95],表示在IoU阈值从0.5到0.95变化时,取各个阈值对应的mAP的平均值。具体来说,它会在IoU阈值从0.5开始,以0.05为步长,逐步增加到0.95,并在每个阈值下计算mAP,然后将这些mAP值求平均。 这个指标考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。当mAP0.5:0.95的值很高时,说明算法在不同阈值下的检测结果均非常准确,覆盖面广,可以适应不同的场景和应用需求。 对于一些需求比较高的场合,比如安全监控等领域,需要保证高的准确率和召回率,这时mAP0.5:0.95可能更适合作为模型的评价标准。 综上所述,mAP0.5和mAP0.5:0.95都是用于评估目标检测模型性能的重要指标,但它们的关注点有所不同。mAP0.5主要关注模型在IoU阈值为0.5时的性能,而mAP0.5:0.95则考虑了多个IoU阈值下的平均精度,从而更全面、更准确地评估模型性能。
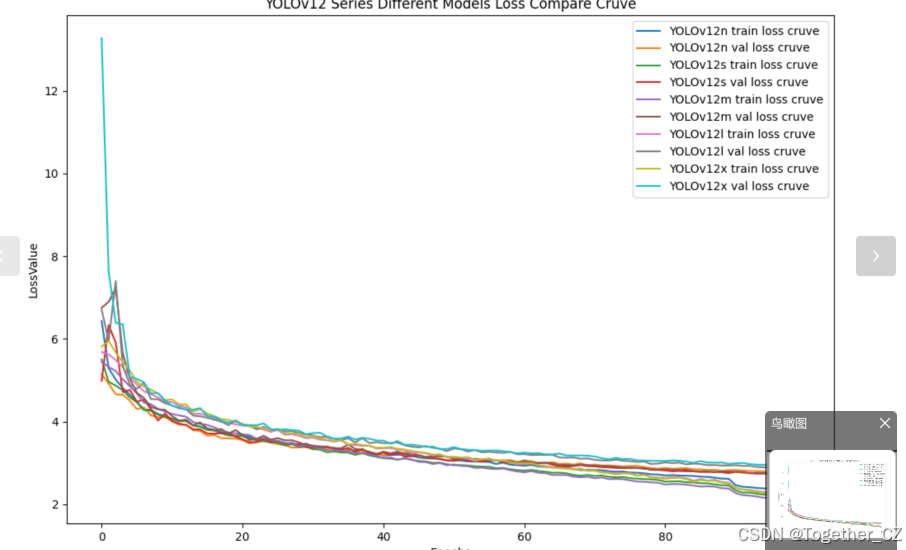
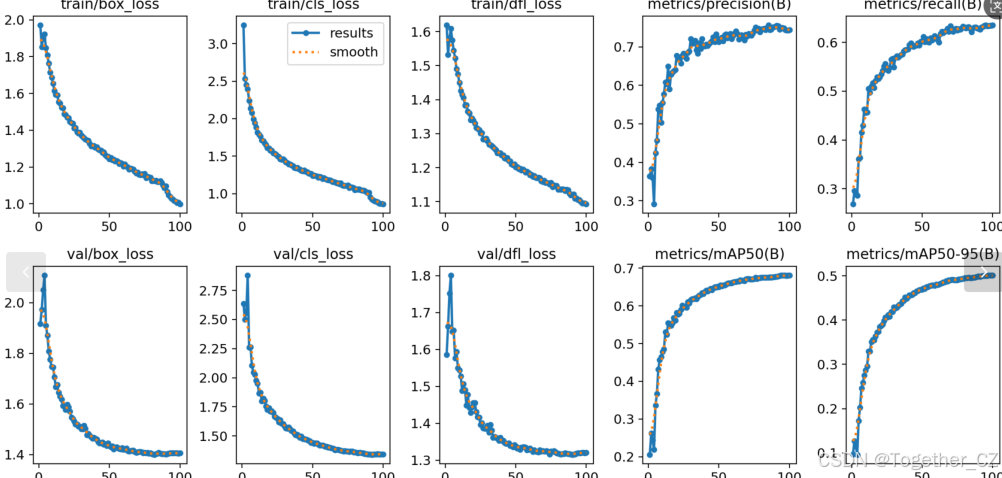
【loss曲线】 在深度学习的训练过程中,loss函数用于衡量模型预测结果与实际标签之间的差异。loss曲线则是通过记录每个epoch(或者迭代步数)的loss值,并将其以图形化的方式展现出来,以便我们更好地理解和分析模型的训练过程。
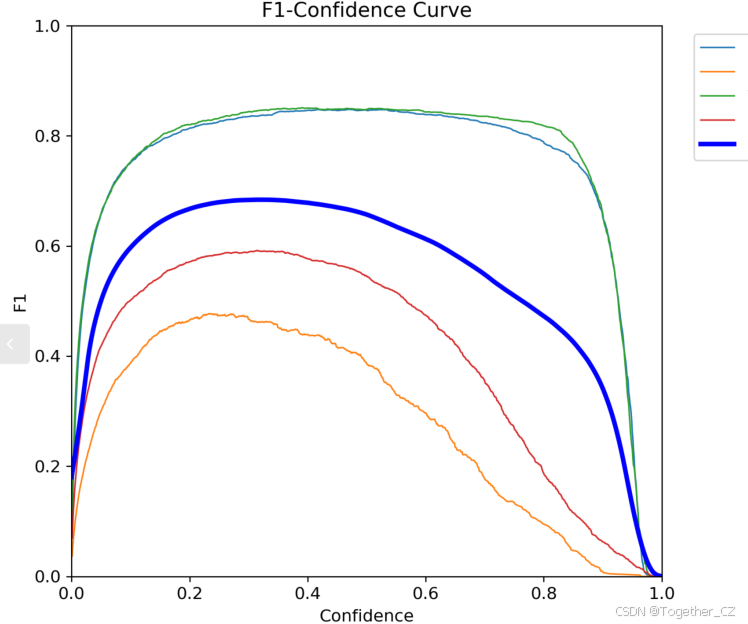
【F1值曲线】 F1值曲线是一种用于评估二分类模型在不同阈值下的性能的可视化工具。它通过绘制不同阈值下的精确率(Precision)、召回率(Recall)和F1分数的关系图来帮助我们理解模型的整体性能。 F1分数是精确率和召回率的调和平均值,它综合考虑了两者的性能指标。F1值曲线可以帮助我们确定在不同精确率和召回率之间找到一个平衡点,以选择最佳的阈值。 绘制F1值曲线的步骤如下: 使用不同的阈值将预测概率转换为二进制类别标签。通常,当预测概率大于阈值时,样本被分类为正例,否则分类为负例。 对于每个阈值,计算相应的精确率、召回率和F1分数。 将每个阈值下的精确率、召回率和F1分数绘制在同一个图表上,形成F1值曲线。 根据F1值曲线的形状和变化趋势,可以选择适当的阈值以达到所需的性能要求。 F1值曲线通常与接收者操作特征曲线(ROC曲线)一起使用,以帮助评估和比较不同模型的性能。它们提供了更全面的分类器性能分析,可以根据具体应用场景来选择合适的模型和阈值设置。
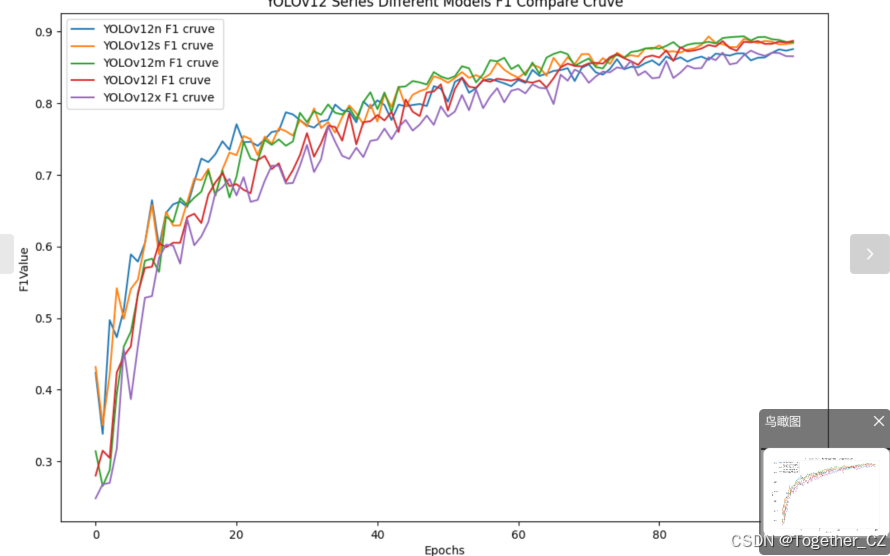
整体对比分析来看:不难发现五款不同参数量级的模型最终达到了较为相似的结果,没有拉开非常大的差距,这里综合参数量考虑我们最终选定了s系列的模型来作为线上的推理计算模型。
接下来看下s系列模型的详细情况。
【离线推理实例】
【Batch实例】
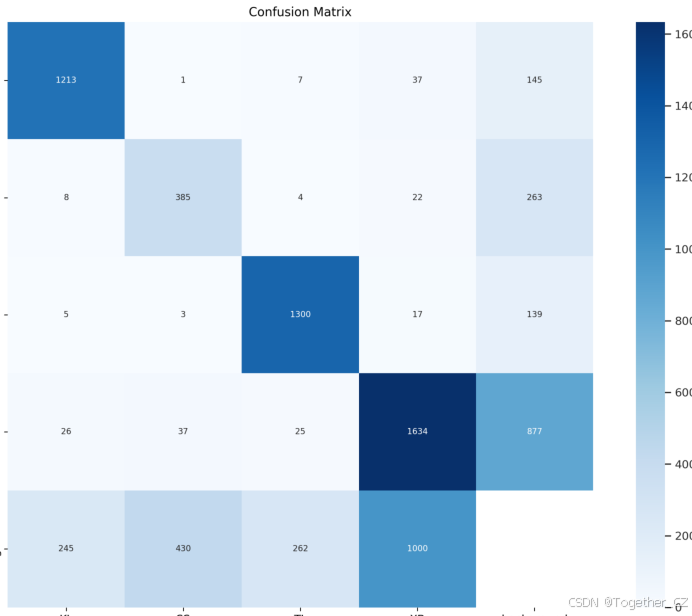
【混淆矩阵】
【F1值曲线】
【Precision曲线】
【PR曲线】
【Recall曲线】
【训练可视化】
AI赋能盾构隧道巡检只是智能化技术在基建领域应用的一个缩影。随着技术的不断进步和创新,智能巡检模式将在更多领域得到广泛应用和推广。未来,我们可以期待更加先进、智能的巡检设备出现,它们将具备更强的感知能力、分析能力和决策能力,能够实现对隧道结构的全方位、多层次监测。同时,智能化检测识别模型也将不断优化和完善,提高对各种复杂问题的识别和处理能力。
此外,智能巡检模式还将与其他技术手段相结合,如大数据、云计算、物联网等,形成一个更加完整、高效的基建安全监测体系。通过数据的共享和协同分析,实现对基建安全的实时评估和预测,为基础设施的规划、建设和维护提供更加科学、准确的决策依据。AI智能化技术为盾构隧道巡检带来了前所未有的机遇和变革。它不仅解决了传统巡检模式的难题,提高了工作效率和精准度,还为基建安全提供了更加可靠的保障。在未来的发展中,我们有理由相信,智能巡检将成为基建领域的主流模式,开启基建安全的新篇章,为我们的出行和生活创造更加安全、便捷的环境。






评论前必须登录!
注册