 网硕互联帮助中心
网硕互联帮助中心文章目录
-
- dlib库安装方法
-
- 1. 使用pip安装(Windows/macOS/Linux)
- 一、基础人脸检测:静态图像处理
- 二、实时视频人脸检测:双检测器对比
- 三、面部关键点检测:68点定位
- 四、实时面部轮廓绘制:凸包与连线
在开始之前,我们需要确保环境配置正确。dlib是一个强大的C++机器学习库,提供了高效的人脸检测和特征点标定算法。下面首先介绍如何安装dlib库。
dlib库安装方法
在Python环境中安装dlib,推荐使用以下方式:
1. 使用pip安装(Windows/macOS/Linux)
pip install dlib
安装注意事项:
- dlib需要CMake和C++编译器支持
- Windows用户可能需要安装Visual Studio Build Tools
- 建议使用Python 3.6及以上版本
- 安装成功后可以通过import dlib验证
一、基础人脸检测:静态图像处理
现在开始我们的第一个示例,展示如何使用dlib库检测图像中的人脸位置。
import cv2
import dlib
# 初始化dlib的人脸检测器
detector = dlib.get_frontal_face_detector()
# 读取待检测的图像文件
img = cv2.imread("people1.png")
# 使用检测器在图像中查找人脸,参数1表示图像金字塔的放大倍数
faces = detector(img, 1)
# 遍历所有检测到的人脸区域
for face in faces:
# 获取人脸边界框的坐标:左上角(x1, y1)和右下角(x2, y2)
x1 = face.left()
y1 = face.top()
x2 = face.right()
y2 = face.bottom()
# 在图像上绘制绿色矩形框标记人脸区域,线宽为2像素
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
# 将图像缩小一半显示,便于观察
cv2.imshow("Face Detection Result", cv2.resize(img, None, fx=0.5, fy=0.5))
# 等待任意按键按下
cv2.waitKey(0)
# 关闭所有OpenCV创建的窗口
cv2.destroyAllWindows()

关键技术点分析:
人脸检测器初始化:dlib.get_frontal_face_detector()创建基于HOG特征和线性SVM分类器的人脸检测器,对正面人脸检测效果良好。
检测参数说明:detector(img, 1)中的第二个参数为upsample_num_times,表示对图像进行上采样的次数。适当的上采样可以帮助检测更小的人脸,但会增加计算时间。
坐标系统:OpenCV使用左上角为原点(0,0),x轴向右,y轴向下的坐标系。face.left()、face.top()分别返回边界框左上角的x和y坐标。
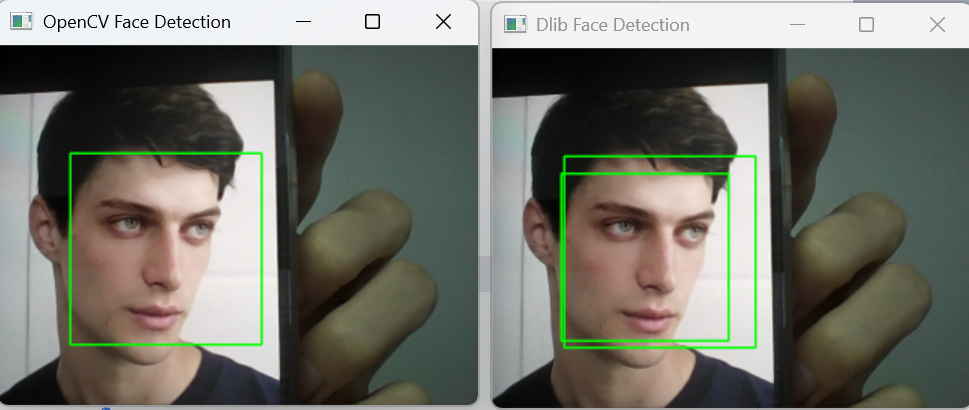
二、实时视频人脸检测:双检测器对比
在实际应用中,我们经常需要处理视频流。这个示例同时使用了OpenCV的Haar级联分类器和dlib检测器,方便对比两种方法的检测效果。
import cv2
import dlib
# 初始化摄像头,参数0表示使用默认摄像头
cap = cv2.VideoCapture(0)
# 初始化dlib人脸检测器
detector = dlib.get_frontal_face_detector()
# 加载OpenCV的Haar级联分类器文件
faceCascade = cv2.CascadeClassifier('haarcascade_frontalface_default.xml')
while True:
# 从摄像头读取一帧图像,ret表示读取是否成功
ret, img = cap.read()
if ret is None:
break
# 将彩色图像转换为灰度图像,大多数检测算法需要灰度输入
gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY)
# 使用dlib检测灰度图像中的人脸
faces = detector(gray, 1)
# 使用OpenCV的Haar级联分类器检测人脸
face = faceCascade.detectMultiScale(gray, scaleFactor=1.05, minNeighbors=15, minSize=(8, 8))
# 绘制OpenCV检测到的人脸矩形框
for (x, y, w, h) in face:
cv2.rectangle(img, (x, y), (x + w, y + h), (0, 255, 0), 2)
cv2.imshow("OpenCV Face Detection", cv2.resize(img,None,fx=0.5,fy=0.5))
# 绘制dlib检测到的人脸矩形框
for face in faces:
x1 = face.left()
y1 = face.top()
x2 = face.right()
y2 = face.bottom()
cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2)
cv2.imshow("Dlib Face Detection", cv2.resize(img,None,fx=0.5,fy=0.5))
# 检测ESC键是否被按下(ASCII码为27),如果是则退出循环
if cv2.waitKey(1) == 27:
break
# 释放摄像头资源
cap.release()
# 关闭所有OpenCV窗口
cv2.destroyAllWindows()
参数深入解析:
VideoCapture参数:cv2.VideoCapture(0)中的0代表系统默认摄像头,可以替换为视频文件路径处理已录制的视频。
Haar级联分类器参数:
- scaleFactor=1.05:图像金字塔的缩放比例,决定搜索窗口的放大步长
- minNeighbors=15:候选框周围需要有多少个邻居框才能被保留,值越大检测越严格
- minSize=(8, 8):检测目标的最小尺寸,忽略更小的区域
waitKey参数:cv2.waitKey(1)中的1表示等待1毫秒,这是视频流畅播放的关键。返回值为按键的ASCII码。
三、面部关键点检测:68点定位
人脸特征点检测是人脸分析的重要步骤,可以精确定位眼睛、鼻子、嘴巴等关键部位。
import numpy as np
import cv2
import dlib
# 读取待处理的图像
img = cv2.imread("lian.jpeg")
# 初始化dlib人脸检测器
detector = dlib.get_frontal_face_detector()
# 检测图像中的人脸
faces = detector(img, 0)
# 加载预训练的面部特征点预测器
predictor = dlib.shape_predictor("shape_predictor_68_face_landmarks.dat")
# 遍历所有检测到的人脸
for face in faces:
# 对每个人脸预测68个特征点的位置
shape = predictor(img, face)
# 将特征点转换为numpy数组格式,便于处理
landmarks = np.array([[p.x, p.y] for p in shape.parts()])
# 遍历所有特征点,绘制并标记序号
for idx, point in enumerate(landmarks):
# 获取特征点的坐标位置
pos = (point[0], point[1])
# 在特征点位置绘制实心圆点,半径为2像素,绿色
cv2.circle(img, pos, 2, (0, 255, 0), –1)
# 在特征点旁边标记序号
cv2.putText(img, str(idx), pos, cv2.FONT_HERSHEY_SIMPLEX, 0.4, (255, 255, 255), 1, cv2.LINE_AA)
# 显示处理结果,图像缩放为原来的80%
cv2.imshow("Facial Landmarks", cv2.resize(img, None, fx=0.8, fy=0.8))
cv2.waitKey(0)
cv2.destroyAllWindows()

特征点分布说明:
68个特征点按照以下方式分布:
- 0-16点:下巴轮廓
- 17-21点:右眉毛
- 22-26点:左眉毛
- 27-35点:鼻梁和鼻尖
- 36-41点:右眼轮廓
- 42-47点:左眼轮廓
- 48-67点:嘴唇外轮廓和内轮廓
关键技术细节:
shape_predictor初始化:需要预训练的模型文件,该模型基于iBUG 300-W数据集训练,能够准确预测68个人脸关键点。
特征点可视化:使用cv2.circle()绘制实心圆点,-1参数表示填充整个圆。cv2.putText()用于添加文本标签,参数依次为:图像、文本内容、位置、字体、字号、颜色、线宽、线型。
四、实时面部轮廓绘制:凸包与连线
这个示例将特征点检测应用于实时视频,并绘制出面部的主要轮廓线,形成更直观的视觉效果。
import numpy as np
import dlib
import cv2
def drawLine(start, end):
"""绘制两点之间的连线"""
# 获取起始点到结束点之间的所有特征点
pts = shape[start:end]
# 遍历相邻点对,绘制连接线
for l in range(1, len(pts)):
ptA = tuple(pts[l – 1])
ptB = tuple(pts[l])
cv2.line(image, ptA, ptB, (0, 255, 0), 2)
def drawConvexHull(start, end):
"""绘制特征点的凸包轮廓"""
# 获取指定范围内的特征点
Facial = shape[start:end + 1]
# 计算凸包(最小凸多边形)
mouthHull = cv2.convexHull(Facial)
# 绘制凸包轮廓
cv2.drawContours(image, [mouthHull], –1, (0, 255, 0), 2)
# 初始化摄像头
cap = cv2.VideoCapture(0)
# 初始化dlib人脸检测器
detector = dlib.get_frontal_face_detector()
while True:
# 读取一帧图像
ret, image = cap.read()
if ret is None:
break
# 检测人脸
faces = detector(image, 0)
# 加载特征点预测器
predictor = dlib.shape_predictor("shape_predictor_68_face_landmarks.dat")
# 处理每个检测到的人脸
for face in faces:
# 预测特征点
shape = predictor(image, face)
# 转换为numpy数组
shape = np.array([[p.x, p.y] for p in shape.parts()])
# 绘制眼睛和嘴巴的凸包轮廓
drawConvexHull(36, 41) # 右眼
drawConvexHull(42, 47) # 左眼
drawConvexHull(48, 59) # 外嘴唇
drawConvexHull(60, 67) # 内嘴唇
# 绘制面部轮廓连线
drawLine(0, 17) # 下巴左侧
drawLine(17, 22) # 眉毛之间
drawLine(22, 27) # 眉毛到鼻梁
drawLine(27, 36) # 鼻梁到右眼
# 显示处理结果
cv2.imshow("Face Contours", image)
# 检测ESC键退出
if cv2.waitKey(1) == 27:
break
# 释放资源
cap.release()
cv2.destroyAllWindows()

凸包算法原理:
cv2.convexHull()函数计算给定点集的最小凸多边形。凸包是多边形的一种,其内部任意两点连线都在多边形内部。在人脸特征点应用中:
- 眼睛轮廓:点36-41和42-47分别形成左右眼的凸包
- 嘴唇轮廓:点48-59形成外嘴唇凸包,点60-67形成内嘴唇凸包




评论前必须登录!
注册