 网硕互联帮助中心
网硕互联帮助中心一、图形旋转
1. NumPy的np.rot90()方法
-
功能:专门用于90度倍数的旋转
-
参数k的含义:
-
k=1:逆时针旋转90度
-
k=-1:顺时针旋转90度
-
k=2:旋转180度(顺时针或逆时针效果相同)
-
k=3:顺时针旋转270度(等同于逆时针90度)
-
-
特点:
-
通过数组转置和翻转实现
-
只能做90度的整数倍旋转
-
旋转中心是图像中心
-
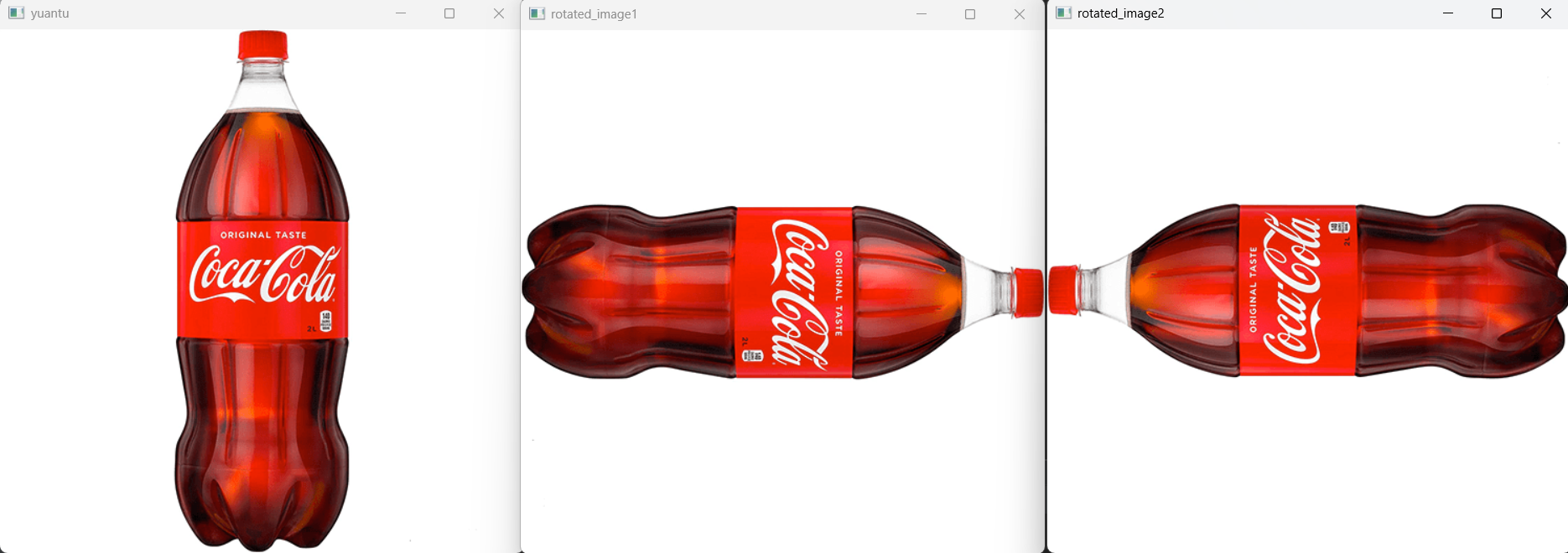
import cv2
import numpy as np
# 方法一
img = cv2.imread('./kele.png')
# 旋转90度,k=-1表示顺时针旋转90度
rotated_image1 = np.rot90(img, k=-1)
# 旋转90度,k=1表示逆时针旋转90度
rotated_image2 = np.rot90(img, k=1)
cv2.imshow('yuantu', img)
cv2.waitKey(0)
cv2.imshow('rotated_image1', rotated_image1)
cv2.waitKey(0)
cv2.imshow('rotated_image2', rotated_image2)
cv2.waitKey(0)
cv2.destroyAllWindows()
2. OpenCV的cv2.rotate()方法
-
功能:提供标准化的旋转操作
-
三种预定义旋转模式:
-
cv2.ROTATE_90_CLOCKWISE:顺时针90度
-
cv2.ROTATE_90_COUNTERCLOCKWISE:逆时针90度
-
cv2.ROTATE_180:旋转180度
-
-
特点:
-
接口更直观
-
底层可能优化了性能
-
语义更清晰
-
import cv2
import numpy as np
img = cv2.imread('./kele.png')
cv2.imshow('yuan',img)
cv2.waitKey(0)
rotated_image = cv2.rotate(img, cv2.ROTATE_90_CLOCKWISE) # 顺时针90度
rotated_image1 = cv2.rotate(img, cv2.ROTATE_90_COUNTERCLOCKWISE) # 逆时针90度
rotated_image2 = cv2.rotate(img, cv2.ROTATE_180) # 旋转180度
cv2.imshow('shun90', rotated_image)
cv2.waitKey(0)
cv2.imshow('ni90', rotated_image1)
cv2.waitKey(0)
cv2.imshow('180', rotated_image2)
cv2.waitKey(0)
cv2.destroyAllWindows()

3.旋转的数学概念
1. 二维旋转矩阵
对于90度旋转,数学上对应:
-
顺时针90度:(x', y') = (y, -x)
-
逆时针90度:(x', y') = (-y, x)
-
180度:(x', y') = (-x, -y)
2. 图像坐标系
-
OpenCV图像坐标系:原点在左上角
-
x轴向右为正,y轴向下为正
-
旋转时需要考虑坐标系方向
3.两种方法的区别
| 灵活性 | 可通过k参数控制任意90度倍数旋转 | 只有三种固定模式 |
| 可读性 | 参数需要记忆(k的正负含义) | 语义更明确 |
| 性能 | NumPy数组操作,通常很快 | OpenCV优化,可能更快 |
| 适用性 | 适合需要动态计算旋转次数的场景 | 适合固定的标准旋转 |
4.注意事项
插值问题:这两种方法都是精确的90度倍数旋转,不需要插值计算
边界处理:旋转后图像边界完整保留
颜色通道:RGB/BGR颜色通道信息完全保留
内存布局:旋转后像素数据重新排列,但数值不变
二、图形可视化
1、可视化层次分析
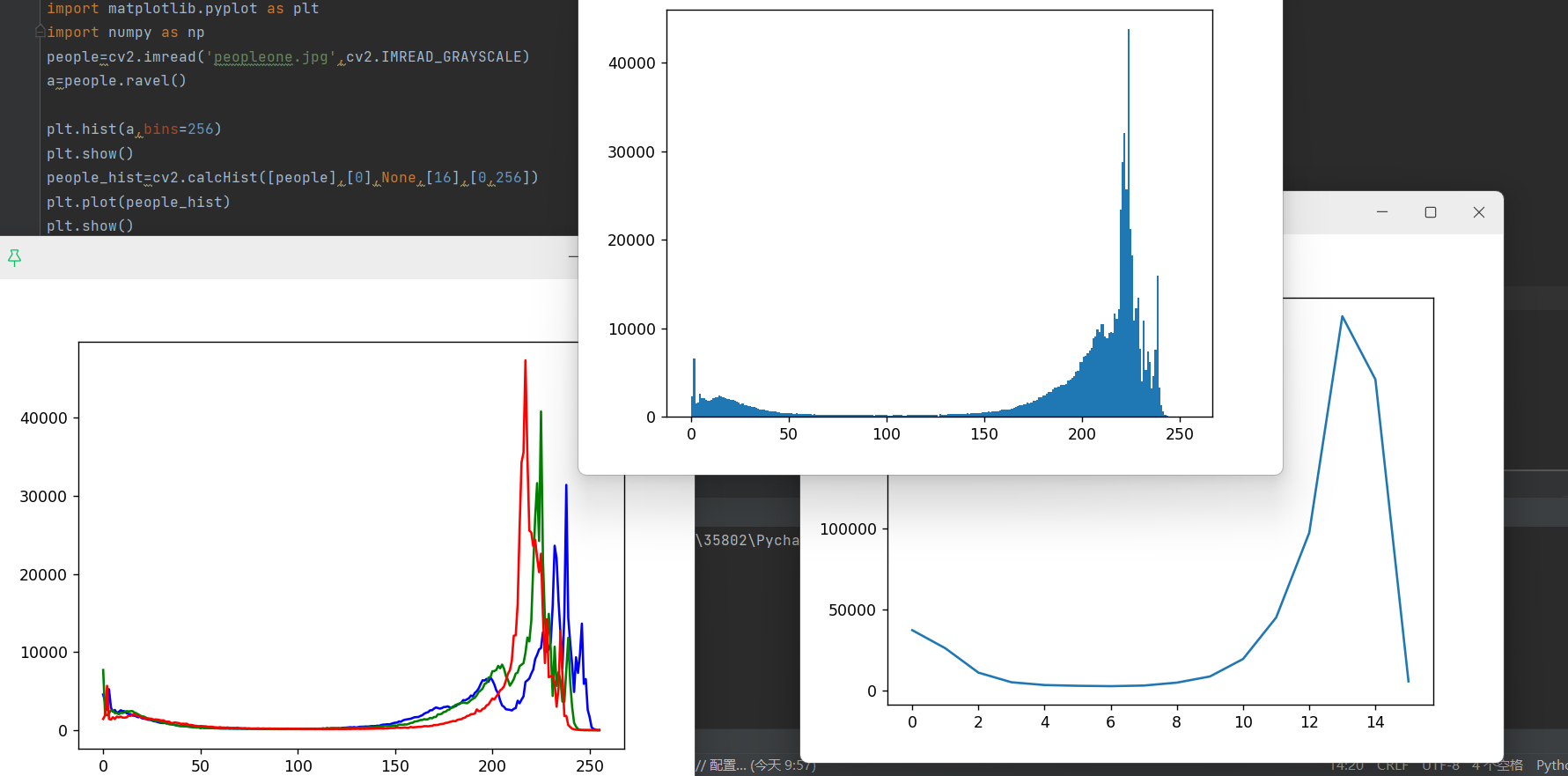
1)像素级数据可视化
-
people.ravel():将二维图像矩阵展平为一维数组
-
把图像的空间结构信息转换为数值分布信息
-
这是从空间域到统计域的转换
2) 统计分布可视化(直方图)
-
直方图展示像素值的频率分布
-
bins(区间)的概念:256个区间 vs 16个区间
-
256 bins:精细分布,显示每个像素值的具体频率
-
16 bins:概览分布,显示像素值范围的趋势
-
2、颜色通道可视化
color=('b','g','r') # 蓝、绿、红
-
通道分离:将彩色图像的BGR通道分别提取
-
颜色编码:用对应通道颜色绘制其直方图
-
多变量对比:同时展示三个相关变量的分布
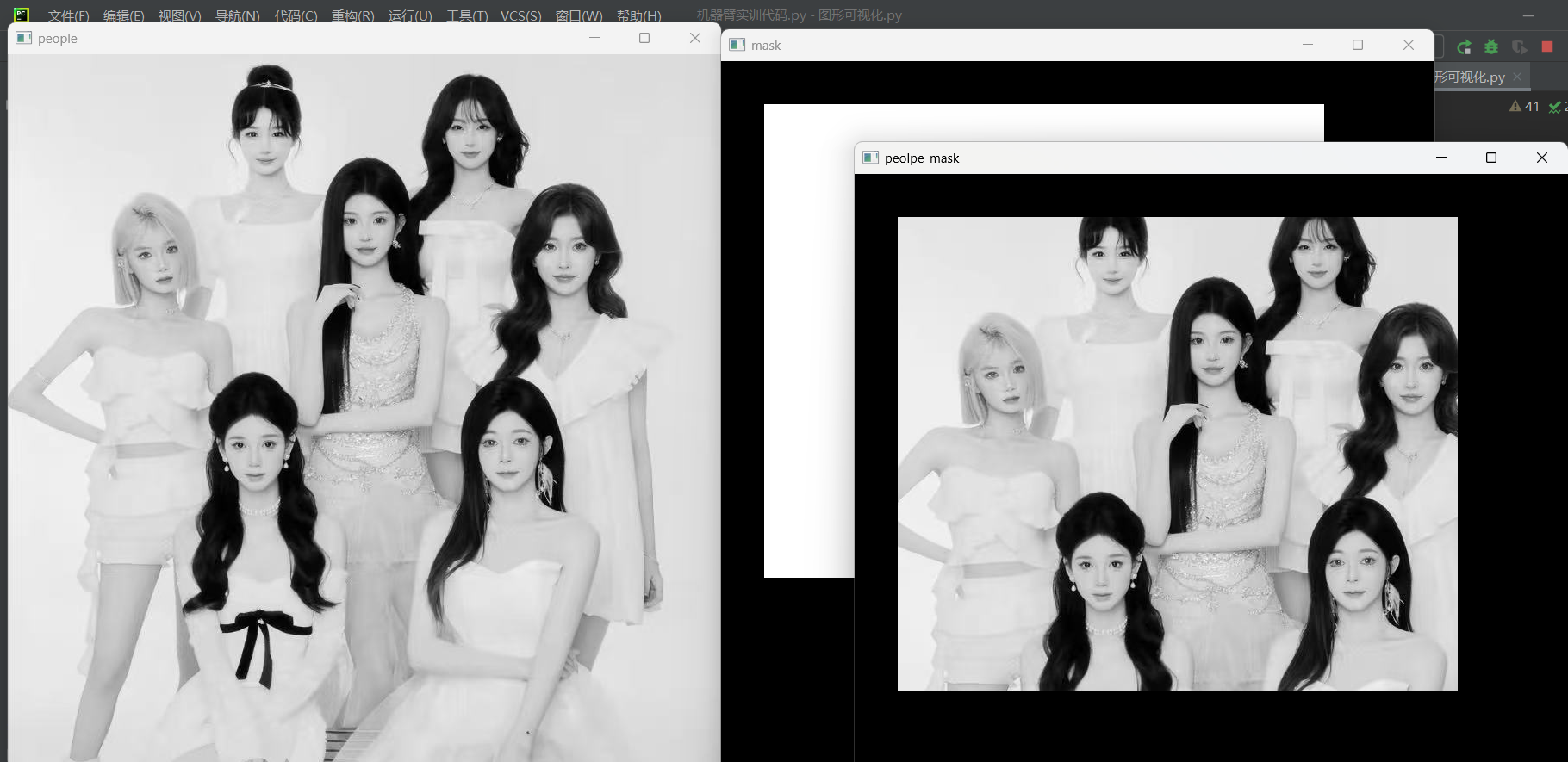
3、空间选择性可视化(掩码技术)
区域选择的可视化:
掩码创建:定义感兴趣区域(ROI)
区域提取:bitwise_and操作隔离特定区域
局部统计:只分析选定区域的像素分布
这种可视化体现了:
-
全局vs局部对比分析
-
空间约束下的数据分布
-
交互式分析的思想:用户可以定义分析区域
4、可视化传达的信息
通过直方图可以判断:
图像对比度:直方图的宽度
图像亮度:直方图的中心位置
曝光情况:是否集中在某一段
颜色平衡:各通道分布是否均衡
图像质量:是否有过多噪声(毛刺)
import cv2
import matplotlib.pyplot as plt
import numpy as np
people=cv2.imread('peopleone.jpg',cv2.IMREAD_GRAYSCALE)
a=people.ravel()
plt.hist(a,bins=256)
plt.show()
people_hist=cv2.calcHist([people],[0],None,[16],[0,256])
plt.plot(people_hist)
plt.show()
img=cv2.imread('peopleone.jpg')
color=('b','g','r')
for i,col in enumerate(color):
histr=cv2.calcHist([img],[i],None,[256],[0,256])
plt.plot(histr,color=col)
plt.show()
people=cv2.imread('peopleone.jpg',cv2.IMREAD_GRAYSCALE)
cv2.imshow('people',people)
cv2.waitKey(0)
mask=np.zeros(people.shape[:2],np.uint8)
mask[50:600,50:700]=255
cv2.imshow('mask',mask)
cv2.waitKey(0)
people_mask=cv2.bitwise_and(people,people,mask=mask)
cv2.imshow('peolpe_mask',people_mask)
cv2.waitKey(0)
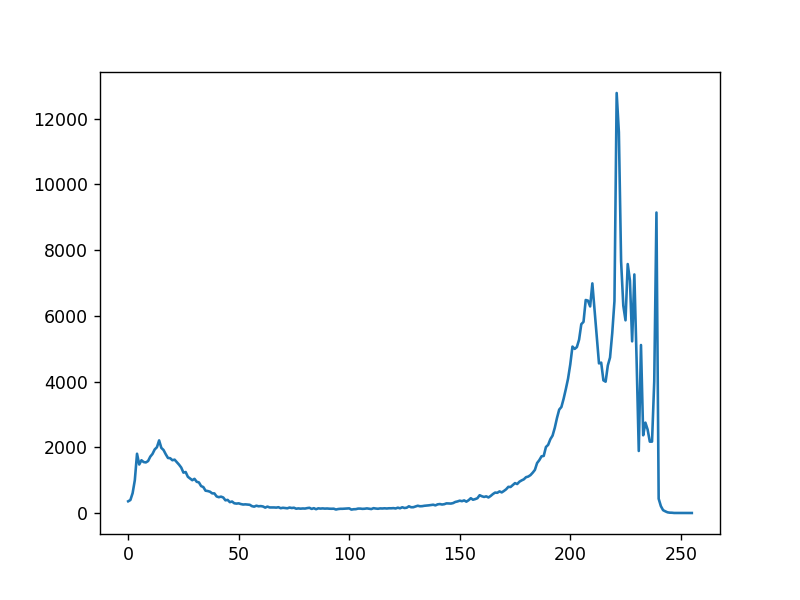
people_hist_mask=cv2.calcHist([people],[0],mask,[256],[0,256])
plt.plot(people_hist_mask)
plt.show()
cv2.destroyAllWindows()
三、整体目标
通过直方图均衡化技术改善图像对比度,展示全局和局部均衡化的效果差异。
1.核心概念:直方图均衡化
基本原理:
重新分布图像像素的强度值,使直方图在整个强度范围内更加均匀,从而增强图像对比度。
2.代码执行流程分析
1. 读取和显示原始图像直方图
renwu = cv2.imread('renwu.jpg', cv2.IMREAD_GRAYSCALE)
plt.hist(renwu.ravel(), bins=256)
-
读取灰度图像
-
显示原始像素强度分布
-
通常低对比度图像的直方图会集中在某个狭窄范围内
2. 全局直方图均衡化
renwu_equalize = cv2.equalizeHist(renwu)
plt.hist(renwu_equalize.ravel(), bins=256)
-
cv2.equalizeHist():对整个图像应用均衡化
-
效果:将原始直方图拉伸到整个0-255范围
-
缺点:可能过度增强某些区域的对比度,丢失细节
3. 可视化对比
res = np.hstack((renwu, renwu_equalize))
-
并排显示原图和处理后图像
-
直观展示对比度改善效果
4. 自适应直方图均衡化(局部处理)
clahe = cv2.createCLAHE(clipLimit=10, tileGridSize=(8, 8))
renwu_clahe = clahe.apply(renwu)
-
CLAHE(Contrast Limited Adaptive Histogram Equalization)
-
工作原理:
-
将图像分成多个小区域(tileGridSize指定,如8×8网格)
-
对每个小区域独立进行直方图均衡化
-
使用clipLimit限制对比度增强程度,防止噪声过度放大
-
5. 最终对比展示
res = np.hstack((renwu, renwu_equalize, renwu_clahe))
-
同时显示:原始图像、全局均衡化、自适应均衡化
-
直观比较三种处理效果


完整代码
import cv2
import numpy as np
import matplotlib.pyplot as plt
# 读取灰度图像
renwu = cv2.imread('renwu.jpg', cv2.IMREAD_GRAYSCALE)
# 显示原图直方图
plt.hist(renwu.ravel(), bins=256) # numpy中的ravel将数组多维度拉成一维数组
plt.show()
# 全局直方图均衡化
renwu_equalize = cv2.equalizeHist(renwu)
# 显示均衡化后的直方图
plt.hist(renwu_equalize.ravel(), bins=256)
plt.show()
# 对比原图和均衡化后的图像
res = np.hstack((renwu, renwu_equalize)) # 横向拼接
cv2.imshow('renwu_rese', res)
cv2.waitKey(0)
# 自适应直方图均衡化(局部直方图处理)
# 当需要保存细节特征,需要做局部处理
# clipLimit: 颜色对比度的阈值,可选项,默认值 8
# tileGridSize: 局部直方图均衡化的模板(邻域)大小,可选项,默认值 (8,8)
clahe = cv2.createCLAHE(clipLimit=10, tileGridSize=(8, 8)) # 创建局部均衡化对象
renwu_clahe = clahe.apply(renwu)
# 对比三种图像
res = np.hstack((renwu, renwu_equalize, renwu_clahe))
cv2.imshow('renwu_equalize', res)
cv2.waitKey(0)
cv2.destroyAllWindows()
3、两种方法的对比
| 处理范围 | 整个图像 | 局部小区域 |
| 对比度控制 | 无限制 | 有限制(clipLimit) |
| 细节保留 | 可能丢失 | 较好保留 |
| 噪声影响 | 可能放大噪声 | 受控放大 |
| 适用场景 | 整体低对比度图像 | 局部对比度差异大的图像 |
4.关键参数说明
1. clipLimit
-
对比度限制阈值
-
防止局部区域对比度过度增强
-
值越大,对比度增强越强
-
默认值2-3,这里设为10(较强增强)
2. tileGridSize
-
划分图像的小区域大小
-
(8, 8)表示将图像分为8×8=64个小区域
-
每个小区域独立进行均衡化
5.实际应用效果
处理后的直方图特征:
全局均衡化:直方图大致均匀分布在整个0-255范围
自适应均衡化:保持了原始直方图的某些特征,但整体更加均衡
视觉改善:
暗部细节显现:原本太暗的区域变亮
亮部细节恢复:原本太亮的区域变暗
整体对比度提升:图像更加清晰





评论前必须登录!
注册