 网硕互联帮助中心
网硕互联帮助中心一、CKF的定位与核心思想
CKF是一种用于非线性系统状态估计的递推贝叶斯滤波算法。要理解它,我们需要从经典的卡尔曼滤波谈起。
卡尔曼滤波:是线性高斯系统状态估计的最优解。它假设系统模型(状态转移和观测模型)都是线性的,并且过程噪声和观测噪声都是高斯白噪声。
非线性挑战:现实中绝大多数系统(如飞行器姿态、目标跟踪、金融模型)都是非线性的。直接应用KF会失效。
EKF的解决方案:扩展卡尔曼滤波通过一阶泰勒展开在估计点处线性化非线性函数,然后应用标准KF公式。缺点:线性化误差大,可能导致滤波发散;需要计算复杂的雅可比矩阵。
UKF的解决方案:无迹卡尔曼滤波采用确定性采样策略。它选取一组“Sigma点”来捕获状态分布的均值和协方差,将这些点通过非线性函数传播,再重新计算传播后点的统计特性。优点:精度通常高于EKF,无需计算雅可比矩阵。
CKF的核心思想: CKF与UKF类似,也是一种基于确定性采样的非线性滤波方法。但其理论基础完全不同。CKF的出发点是:非线性滤波的核心难点在于计算非线性变换下的高斯加权积分(期望和协方差)。CKF利用球面-径向容积规则,以数值积分的最优方式(在三阶精度内)来近似这些积分。它生成一组数量最少、权重相等的容积点,通过这些点的传播来精确估计后验分布的均值和协方差。
简单比喻:
-
EKF:用一个切平面(线性)来近似一个曲面(非线性)。
-
UKF:用一组精心挑选的、有不同权重的“代表点”去探测曲面。
-
CKF:用一组完全对称、权重相等的“容积点”,按照一个最优的几何规则去探测曲面,能更结构化、更数值稳定地计算曲面下的“体积”(即统计特性)。
二、数学原理:容积规则
这是CKF区别于UKF的理论核心。问题归结为计算如下形式的多维积分:
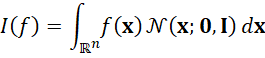
其中,![]() 是标准高斯分布。在滤波中,
是标准高斯分布。在滤波中,![]() 是非线性函数。
是非线性函数。
球面-径向容积规则 将这个积分分解为径向积分和球面积分



评论前必须登录!
注册