 网硕互联帮助中心
网硕互联帮助中心引言:从问题到解决方案的跨越
在上一篇的探索中,我们揭示了理想功率模型的脆弱性:面对一个简单的台式风扇(感性负载),基于 P = Uᵣₘₛ × Iᵣₘₛ 的计算结果竟显著偏离真实值。我们认识到,其根源在于电压与电流波形之间存在的相位差(φ)。
然而,更深入的剖析带来了更严峻的挑战:我们通过ADC采样直接获得的"相位差",并非负载特性的纯净反映,而是一个由负载真实相移(φ_load) 与测量系统固有误差(φ_system) 叠加而成的混合信号:

若不能将二者精确分离,任何精密测量都无从谈起。这引出了两个核心问题:
如何精确捕获电压与电流之间的原始相位差 φ_raw?
如何分离并补偿系统固有误差 φ_system,提取真实的负载相移 φ_load?
本章将系统性地解答这些问题。我们将以快速傅里叶变换(FFT) 为核心工具,构建一套从"标定"到"补偿"的完整数字处理链路,实现从嘈杂的现实数据中提取出真实的电气参数,完成高精度计量的最终跨越。
一、相位差的精确捕获:FFT频谱分析法
要在数字域捕获相位差,需将时间上的波形偏移转化为可计算的相位角度。FFT方法因其精度和频域洞察力成为首选。
1.1 核心原理:从时域到频域的映射
FFT将时域信号分解为一系列复数频率分量。对于经同步采样获得的电压序列 u[n] 和电流序列 Iraw[n],分别进行FFT后,可得到各自的复数表示:
则原始相位差可直接计算为:
![]()
1.2 关键实现步骤
同步采样:使用双通道ADC或严格同步的采样时钟,确保电压和电流采样的时间一致性。
整周期截断:采集整数个信号周期,减少频谱泄露对相位精度的影响。
基频分量提取:在FFT结果中,定位电网基频(如50Hz/60Hz)对应的频点,该点的相位信息最为准确。
二、系统固有误差的标定:寻找"零位"基准
分离 φ_system 的关键在于建立一个已知 φ_load = 0 的参考状态,此时测量出的 φ_raw 即为 φ_system。
2.1 标定流程
连接标准负载:可以使用标准源,没有的话使用一个无感型纯电阻负载,其阻值应在测量系统量程内,确保信号幅度合适。
采集与计算:在该状态下采集足够周期的电压和电流波形,计算原始相位差 φ_raw。
转换为时延:将相位差转换为系统固有延时 τ:

多次平均:重复多次测量取平均值,提高标定精度。
三、数字补偿的核心:频域旋转法
获得系统延时 τ 后,补偿的目标是:在数字域抵消这个固定延时的影响。直接在时域对采样序列进行移位和插值不仅计算复杂,且会引入新的误差。一种在数学上严格等价、在工程上更优雅的方法是频域旋转补偿法。
3.1 理论基础:时延的频域等价操作
信号处理中的时移定理指出:时域上的一个固定延时 τ,完全等价于在频域乘以一个复数旋转因子 (其中 ω = 2πf)。
(其中 ω = 2πf)。
对于我们的系统,ADC采样到的电流信号 isampled(t)可表示为真实电流 i(t)的延时版本:
![]()
其频谱关系为:

这个旋转因子只改变复频谱的相位角,而不改变其幅度。它在每个频率点 f 上,都将真实电流的相位向后旋转了 2πfτ 弧度。
3.2 补偿操作:在FFT域内逆转旋转
既然系统误差是在频域上做了"减法旋转",那么补偿就是对其做"加法旋转"。我们通过复数乘法,对电流频谱进行补偿:

补偿后的频谱 Icompensated(f),其相位已与真实电流 I(f) 的相位完全相同。
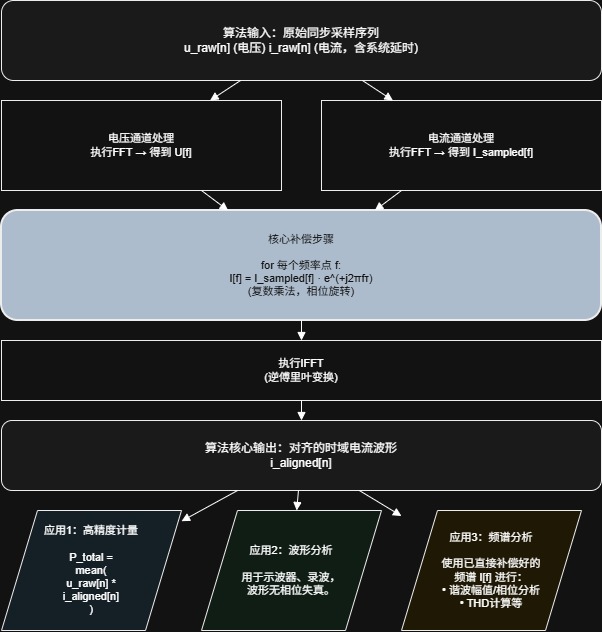
3.3 完整算法流程:从补偿到波形重建
该方法的强大之处在于,它不仅能修正相位用于计算,更能重建出在时域上与电压严格对齐的电流波形,为所有后续分析提供纯净数据源。其完整的数据处理链如下:
3.4 STM32实现关键代码(基于CMSIS-DSP库)
/**
* 功率分析器核心数据结构
* 注:为简洁起见,省略部分辅助成员
*/
typedef struct {
// 核心配置
uint32_t fft_size; // FFT点数(2的幂)
float32_t sampling_freq; // 采样频率
// 数据缓冲区
float32_t *voltage_data; // 电压采样
float32_t *current_data; // 电流原始采样
float32_t *current_aligned; // 补偿后电流
// 系统参数
float32_t system_delay; // 标定得到的系统延时
bool is_calibrated; // 标定状态
bool is_compensated; // 补偿状态
// FFT处理实例
arm_rfft_fast_instance_f32 fft_instance;
} PowerAnalyzer;
/**
* 频域旋转补偿法
* 原理:通过复数乘法在频域消除系统延时影响
* 数学基础:时域延时 τ ↔ 频域旋转因子 e^{-j2πfτ}
*/
bool PowerAnalyzer_Compensate(PowerAnalyzer *analyzer, float32_t *temp_buffer)
{
// 参数检查
if (!analyzer || !analyzer->is_calibrated) return false;
// Step 1: 时域 → 频域(电流信号)
arm_rfft_fast_f32(&analyzer->fft_instance, current_data, fft_buffer, 0);
// Step 2: 频域相位旋转补偿(核心操作)
if (fabsf(analyzer->system_delay) > 1e-9f) {
// 实数FFT特殊格式处理
// fft_buffer[0]: DC分量
// fft_buffer[1]: 奈奎斯特频率
// fft_buffer[2k], fft_buffer[2k+1]: 频率k的复数表示
// 处理直流分量(不需要补偿)
// fft_buffer[0] 保持不变
// 处理奈奎斯特频率
if (analyzer->fft_size >= 2) {
float32_t nyquist_freq = analyzer->sampling_freq / 2.0f;
float32_t phase = 2 * PI * nyquist_freq * analyzer->system_delay;
fft_buffer[1] *= cosf(phase); // 只有实部
}
// 处理其他频率分量
for (uint32_t k = 1; k < analyzer->fft_size/2; k++) {
float32_t freq = k * analyzer->sampling_freq / analyzer->fft_size;
float32_t phase = 2 * PI * freq * analyzer->system_delay;
// 生成旋转因子
float32_t cos_factor = cosf(phase);
float32_t sin_factor = sinf(phase);
// 复数乘法:I_comp = I_raw * e^{j2πfτ}
uint32_t idx_re = 2 * k;
uint32_t idx_im = idx_re + 1;
float32_t re = fft_buffer[idx_re];
float32_t im = fft_buffer[idx_im];
fft_buffer[idx_re] = re * cos_factor – im * sin_factor;
fft_buffer[idx_im] = re * sin_factor + im * cos_factor;
}
}
// Step 3: 频域 → 时域(获取补偿后波形)
arm_rfft_fast_f32(&analyzer->fft_instance, fft_buffer, current_aligned, 1);
analyzer->is_compensated = true;
return true;
}
四、全波有功功率的终极计算:时域积分法
通过上述补偿,我们获得了与电压波形在时域上严格对齐的电流序列ialigned[n]。基于此,计算全波有功功率最权威、最直接的方法是回归其物理定义——瞬时功率的平均值。
4.1 计算公式
全波有功功率 Ptotal的定义是瞬时功率在一个周期内的平均值。对于离散系统:
其中:
-
N 为一个完整周期内的采样点数
-
u[n] 为电压采样序列
-
ialigned[n]为补偿对齐后的电流采样序列
4.2 完整功率计算实现
4.3 完整的功率计算框架
/**
* 有功功率计算:时域积分法
* 公式:P = (1/N) * Σ(u[n] * i[n])
* 特点:物理意义明确,精度最高
*/
void PowerAnalyzer_CalculatePower(PowerAnalyzer *analyzer)
{
float32_t sum_ui = 0, sum_u2 = 0, sum_i2 = 0;
// 选择电流数据源:补偿后或原始
float32_t *current = analyzer->is_compensated ?
analyzer->current_aligned :
analyzer->current_data;
// 时域积分计算
for (uint32_t i = 0; i < analyzer->fft_size; i++) {
float32_t u = analyzer->voltage_data[i];
float32_t i_val = current[i];
sum_ui += u * i_val; // 瞬时功率累加
sum_u2 += u * u; // 电压平方累加
sum_i2 += i_val * i_val; // 电流平方累加
}
// 计算各参数
uint32_t N = analyzer->fft_size;
analyzer->power_active = sum_ui / N;
analyzer->voltage_rms = sqrtf(sum_u2 / N);
analyzer->current_rms = sqrtf(sum_i2 / N);
analyzer->power_apparent = analyzer->voltage_rms * analyzer->current_rms;
// 功率因数计算(含保护机制)
if (analyzer->power_apparent > 1e-6f) {
analyzer->power_factor = analyzer->power_active / analyzer->power_apparent;
// 限制在[-1, 1]范围内
analyzer->power_factor = fmaxf(-1.0f, fminf(1.0f, analyzer->power_factor));
}
}
五、总结与展望
至此,我们完成了高精度交流计量系统的闭环构建:
精确测量:通过FFT频谱分析,精确捕获电压与电流之间的原始相位差。
系统标定:使用纯阻性负载建立"零相位差"基准,量化系统固有延时。
智能补偿:在频域执行相位旋转,消除系统误差,重建纯净的负载电流信号。
权威计算:基于时域积分法,计算得到准确的有功功率和能量值。









评论前必须登录!
注册