 网硕互联帮助中心
网硕互联帮助中心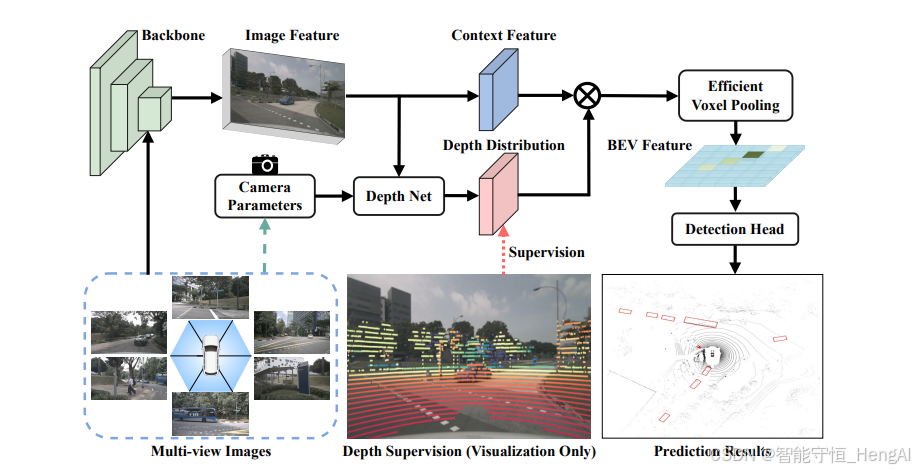
图像算法工程师入门3D图像感知,核心是衔接已有2D视觉基础,补充3D空间几何认知、3D数据处理能力,并通过实践掌握核心技术链路。3D图像感知的本质是从“平面像素”升级到“空间坐标+语义”,需围绕“3D数据表示→深度获取→3D建模→3D分析(检测/分割)”构建知识体系,以下是分阶段、可落地的入门路径。
一、先补核心基础:3D感知的“地基”
图像算法工程师已具备2D视觉(如CNN、图像分割)和编程能力,入门3D需优先攻克几何基础、3D数据格式、核心工具链,这是后续实践的前提。
1. 必学几何与数学基础
3D感知的核心是“将2D图像映射到3D空间”,需理解坐标系转换、相机模型等几何逻辑,数学无需深究推导,但需会用核心公式。
| 坐标系与变换 | 世界坐标系、相机坐标系、图像坐标系(像素/归一化);刚体变换(旋转+平移)、透视投影 | 点云配准、图像转点云 |
| 相机模型 | 针孔相机模型(内参K |








评论前必须登录!
注册