 网硕互联帮助中心
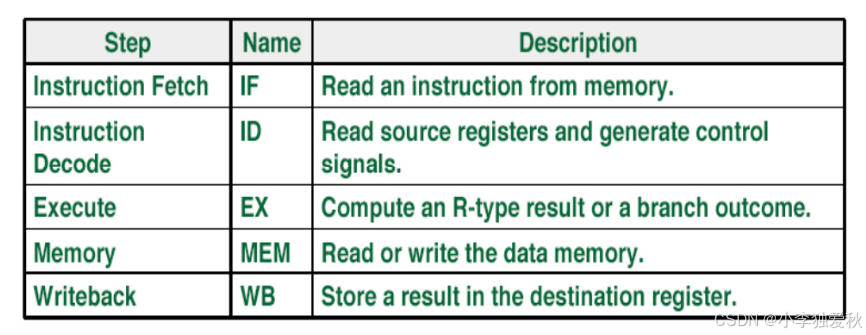
网硕互联帮助中心在MIPS处理器的多周期实现中,微指令作为控制单元的核心输出,直接驱动数据通路的协同运作。本文基于经典五级流水线理论(IF-ID-EX-MEM-WB),深入剖析五大类微指令的硬件行为与控制逻辑,并通过ADD指令的完整执行流程揭示其设计精髓。
一、微指令与数据通路的协同框架
微指令的本质是控制信号的时空组合,通过控制字段驱动以下关键硬件模块:
// 数据通路核心组件
PC模块 // 程序计数器
RegFile // 32×32位寄存器堆
ALU // 算术逻辑单元
MemUnit // 指令/数据存储器
MUX网络 // 多路选择器(控制数据流向)
📌 设计哲学:每条微指令控制一个时钟周期内的硬件动作,多周期CPU通过状态机串联微指令序列。
二、五大类微指令详解(附信号真值表)
1. 取指微指令(IF)
硬件动作拓扑:
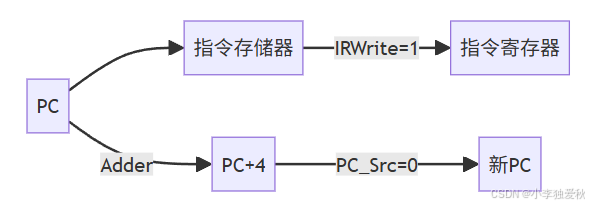
关键信号:
| MemRead | 1 | 启动指令存储器读操作 | 输出指令到总线 |
| IRWrite | 1 | 允许IR写入 | 锁存当前指令 |
| PC_Src | 0 | 选择PC+4路径 | PC←PC+4(顺序执行) |
💡 注:此阶段不依赖指令译码,为所有指令共享
2. 运算微指令(ALU Execution)
R型指令控制逻辑:
case(ALUOp)
2'b10: ALU_ctl = funct_field[3:0]; // 解析funct字段
default: // 其他操作码处理
endcase
信号组合:
| ALUSrcA | 1 | 选择RegA作为ALU输入1 |
| ALUSrcB | 00 | 选择RegB作为ALU输入2 |
| RegDst | 1 | 目标寄存器选择rd字段 |
| ALU_Result | – | 结果暂存于ALUOut寄存器 |
⚙️ 关键细节:funct字段在译码阶段已提取,本阶段映射为具体ALU操作
3. 访存微指令(Memory Access)
LW指令数据流:
基址寄存器 + 偏移量 → ALU计算地址 → Mem[addr] → MDR
信号组合:
| IorD | 1 | 选择ALU结果作内存地址 |
| MemRead | 1 | 启动数据存储器读操作 |
| MemtoReg | 1 | 标记结果需从内存加载 |
⚠️ 危险处理:存储器访问需2周期时插入stall信号
4. 分支微指令(Branch Control)
BEQ指令决策逻辑:
if (RegA == RegB)
PC = PC + (sign_ext(offset) << 2);
else
PC = PC + 4;
信号组合:
| ALUSrcB | 01 | 选择符号扩展立即数 |
| ALUOp | 01 | SUB比较(产生Zero标志) |
| PCSrc | 1 | 条件满足时选择分支地址 |
🔄 优化:现代MIPS通过分支预测减少流水线清空代价
5. 写回微指令(Write-Back)
双路径设计:
ALU结果 → RegFile (R型指令)
MDR → RegFile (LW指令)
信号组合:
| RegWrite | 1 | 1 | 允许写寄存器 |
| MemtoReg | 0 | 1 | 选择ALU/MDR数据源 |
| RegDst | 1 | 0 | 目标寄存器选择 |
三、ADD指令全流程:微指令的时空调度
以add $t1, $t2, $t3为例的硬件级执行时序:
| T1 | 取指(IF) | 读取指令 | PC→指令地址, IR←Mem[PC], PC←PC+4 | MemRead=1, IRWrite=1, PC_Src=0 |
| T2 | 译码(ID) | 读取t3 | RegFile读端口A←t2,读端口B←t3 | A_Write=1, B_Write=1 |
| T3 | 执行(EX) | ALU加法 | ALUOut←t2+t3 | ALUSrcA=1, ALUSrcB=00, ALUOp=10 |
| T4 | 写回(WB) | 结果存$t1 | Reg[$t1]←ALUOut | RegWrite=1, RegDst=1, MemtoReg=0 |
🔍 关键机制:
四、微指令设计的工程挑战与解决方案
1. 分支延迟槽问题
- 传统方案:分支指令后强制执行1条指令(延迟槽)
- 现代优化:采用动态分支预测器+投机执行,消除NOP浪费
// 分支预测示例
if (BranchPredictor.take_branch())
speculative_execute(target);
2. 控制信号冲突
当LW指令后紧接ADD指令时:
lw $t0, 0($sp)
add $t1, $t0, $t2 # $t0未就绪
解决方案:
- 硬件互锁:插入气泡(Stall)
- 编译器调度:重排指令序列
lw $t0, 0($sp)
nop // 硬件自动插入
add $t1, $t0, $t2
3. 原子操作支持
LL/SC指令对需要特殊微指令序列:
LL: // 加载链接
MemRead → LLbit置位
SC: // 条件存储
if (LLbit==1) 存储成功并清LLbit
else 存储失败
五、微程序 vs 硬布线:MIPS实现的权衡
| 性能 | 1指令≈4周期(多周期) | 1指令≈1周期(流水线) |
| 灵活性 | 可更新微码修复漏洞 | 需重新流片修改 |
| 设计复杂度 | 微程序ROM编码(易扩展) | 门级电路优化(高频设计) |
| 典型代表 | 教学用MIPS多周期CPU | MIPS R10000商用处理器 |
💎 结论:微程序控制以设计灵活性取胜,硬布线以峰值性能见长,现代CPU常采用混合方案
结语:微指令背后的体系结构思想
MIPS微指令设计体现了RISC架构的核心理念:
理解微指令的硬件映射关系,是掌握CPU设计精髓的关键。随着RISC-V等开源架构兴起,微程序思想仍在敏捷设计领域焕发新生。



评论前必须登录!
注册