 网硕互联帮助中心
网硕互联帮助中心来gongzhonghao【图灵学术计算机论文辅导】,快速拿捏更多计算机SCI/CCF发文资讯~
在大模型时代,多模态融合与机器人交互的研究正成为学术界和工业界的热门方向。随着多模态大模型(MLLM)的不断发展,如何高效地将这些模型应用于实际的机器人交互任务中,成为了研究者们关注的焦点。
本文将深入探讨三篇前沿论文,它们分别从自然语音和姿态驱动的人机交互、闭环视觉运动控制以及快速运动适应三个角度,展示了多模态大模型在机器人领域的创新应用和突破。
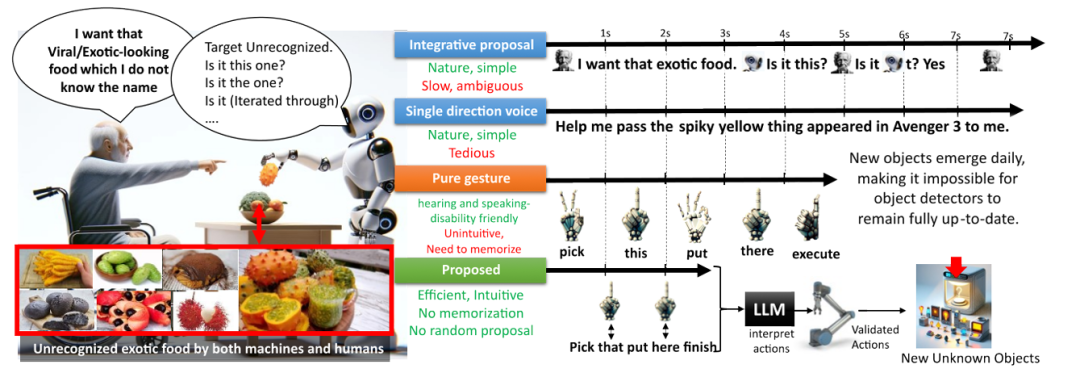
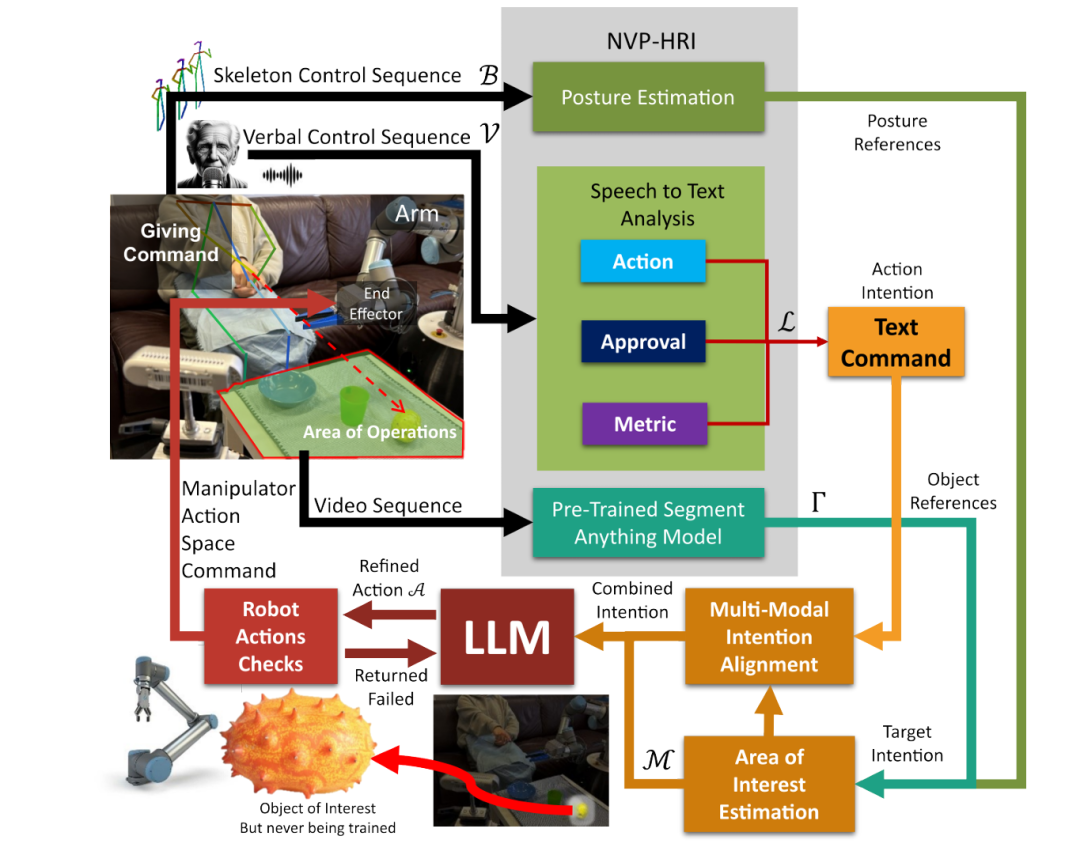
NVP-HRI: Zero Shot Natural Voice and Posture-based Human-Robot Interaction via Large Language
方法:该研究首先利用预训练的Segment Anything Model(SAM)分析视觉线索和深度数据,实现对未知物体的精确结构化表示。然后,通过语音指令理解模块将语音命令转换为文本,并与姿态估计模块结合,确定用户意图指向的目标物体。最后,利用LLM将多模态命令序列编译成机器人动作序列,并通过交叉检查机制确保动作序列的安全性和准确性。
创新点:
-
提出了一种新的多模态人机交互框架,能够高效地分割零样本未知物体,并将语音和姿态指令与物体选择和场景分布实时协调,生成无碰撞的轨迹解决方案。
-
利用大型语言模型(LLM)生成机器人控制序列,通过精心设计输入表示和输出标记,有效解决了LLM的幻觉问题,确保了交互的安全性和性能。
-
在真实世界任务中,与传统手势控制相比,该系统展示了高达59.2%的效率提升,且无需记忆复杂语法,特别适合老年人和医疗保健应用。
总结:这篇文章介绍了一种创新的人机交互方式,通过结合语音指令和姿态识别,利用多模态大模型(MLLM)实现无需预训练即可与新物体进行交互的零样本学习,极大地提高了服务机器人在老龄化社会中的实用性和交互效率。
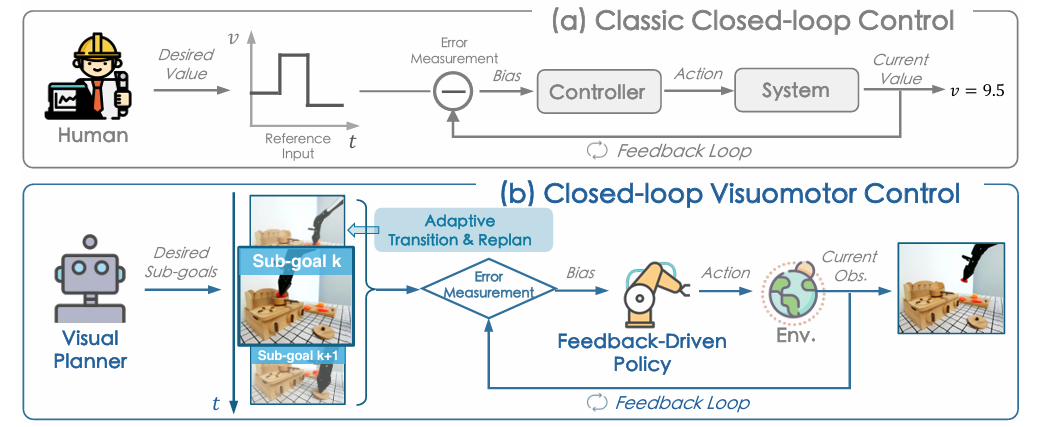
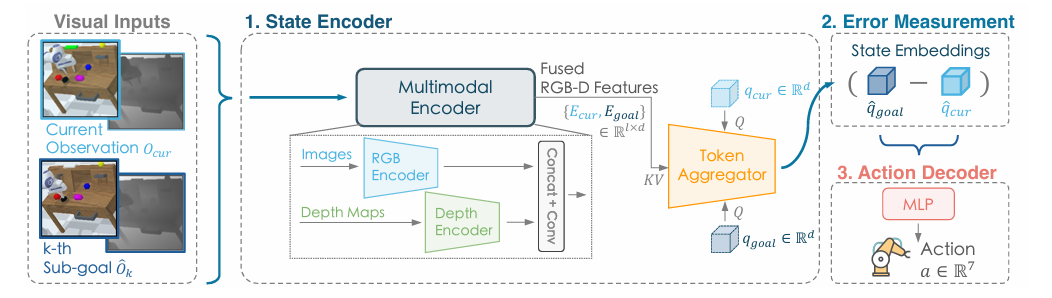
Closed-Loop Visuomotor Control with Generative Expectation for Robotic
方法:文章首先利用文本条件的RGB-D视频生成模型生成未来的视频帧作为参考输入,通过深度图生成和光流正则化技术提高视觉计划的准确性和一致性。然后,通过建立可测量的嵌入空间,实现观测状态和计划状态之间的准确误差测量,为反馈控制提供依据。最后,采用基于误差感知的自适应控制策略,通过逆动力学目标优化控制器,实现对预定义子目标的精确跟踪,并在必要时进行迭代细化和重新规划。
创新点:
-
提出了一个闭环视觉运动控制框架CLOVER,通过引入反馈机制,显著提高了机器人控制的适应性和鲁棒性。
-
设计了一个可测量的嵌入空间,用于实现观测状态和计划状态之间准确且高效的误差测量,解决了传统方法中误差测量不准确的问题。
-
提出了一种基于误差感知的自适应控制策略,使机器人能够在目标不可行时自动重新规划,并在达成目标后自动过渡到下一个目标,增强了系统的灵活性和实用性。
总结:这篇文章提出了一个创新的闭环视觉运动控制框架,通过生成期望来实现机器人操作的闭环控制,解决了现有开环控制方法在动态环境和长时序任务中适应性不足的问题。
纠结选题?导师放养?投稿被拒?对论文有任何问题的同学,欢迎来gongzhonghao【图灵学术计算机论文辅导】,获取顶会顶刊前沿资讯~
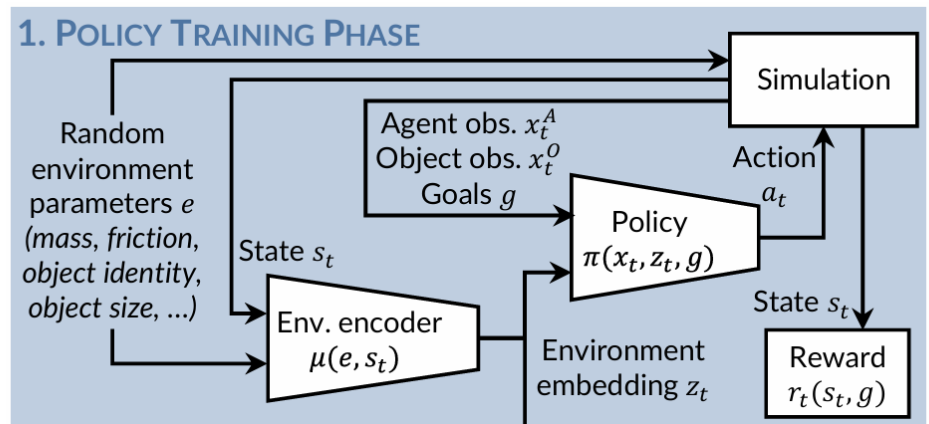
Rapid Motor Adaptation for Robotic Manipulator Arms
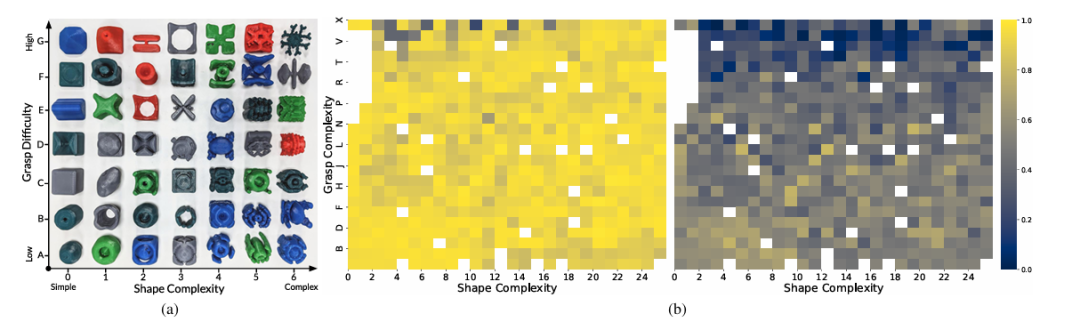
方法:文章首先通过类别和实例字典来增强机器人的几何感知能力,使其能够识别和操作不同形状和位置的物体。接着,利用深度卷积神经网络隐式地估计环境的特权信息,从而在没有明确环境参数的情况下也能进行有效的操作。最后,通过在模拟环境中进行广泛的实验验证了该方法的有效性,证明了其在多种任务中的泛化能力和样本效率优于现有的基线方法。
创新点:
-
提出了类别和实例字典作为几何感知操作的强代理,这对于学习不可跨物体转移的策略至关重要,例如抓取不同位置的把手。
-
使用深度卷积神经网络来隐式地估计环境的特权信息,仅通过对象类别和实例分类来实现。
-
首次将快速运动适应应用于机器人手臂的一般物体操作任务,展示了其在多种任务中的泛化能力和样本效率。
总结:这篇文章提出了一种名为“Rapid Motor Adaptation for Robotic Manipulator Arms”(RMA)的方法,旨在解决机器人在面对不同物体和环境时的快速适应问题,使机器人能够高效地完成各种操作任务。
关注gongzhonghao【图灵学术计算机论文辅导】,快速拿捏更多计算机SCI/CCF发文资讯~









评论前必须登录!
注册