 网硕互联帮助中心
网硕互联帮助中心摘要:汽车四轮定位参数与悬架密切相关。汽车悬架对于车辆的行驶性能、安全性和舒适性至关重要。DTAS 3D提供了各类型悬架的公差仿真分析方法。
关键字:DTAS 3D、前后悬架、公差仿真分析、 运动耦合
一、悬架公差分析综述
悬架是车身(或车架)与车轮(或车桥)中间的连接装置的总称,是汽车的重要组成部分。汽车悬架对于车辆的行驶性能、安全性和舒适性都至关重要,同时四轮定位参数与悬架密切相关,对车辆的正常行驶也起着关键作用。汽车在行驶过程中会遇到各种路面颠簸和不平,悬架系统通过弹簧、减震器等部件的协同工作,能够有效地缓冲和吸收这些震动,减少车身的起伏和晃动,使乘客感受到更加平稳舒适的驾乘体验。悬架系统对汽车的操纵稳定性起着关键作用。它能够保持车轮与地面的良好接触,使轮胎在各种行驶条件下都能有效地传递力和力矩。在转弯、制动和加速时,悬架系统通过合理地分配车轮载荷,控制车身的姿态变化,确保汽车按照驾驶员的意图行驶,提高行驶的安全性和操控性。
悬架公差仿真分析目标是各公差对四轮定位参数的影响。前后轮的四轮参数包括车轮外倾、前束、前轮还包括主销倾角等。
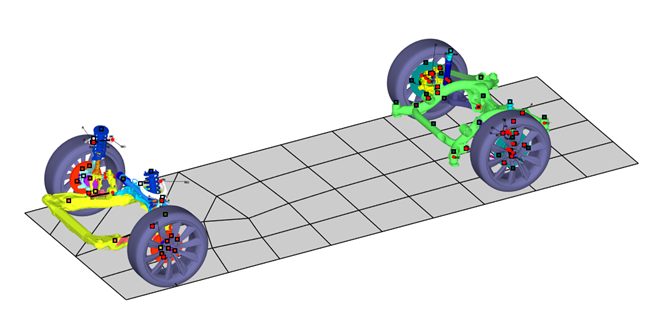
DTAS 3D两种方式进行底盘悬架公差仿真分析,一是可以通过建立面向底盘的静态虚拟装配,如多约束装配、旋转装配等,将公差分析与运动分析耦合仿真分析。第二种方式是建立各种运动副及驱动。两种方式虽然建模方式略有差异,但本质及结果是一致的。
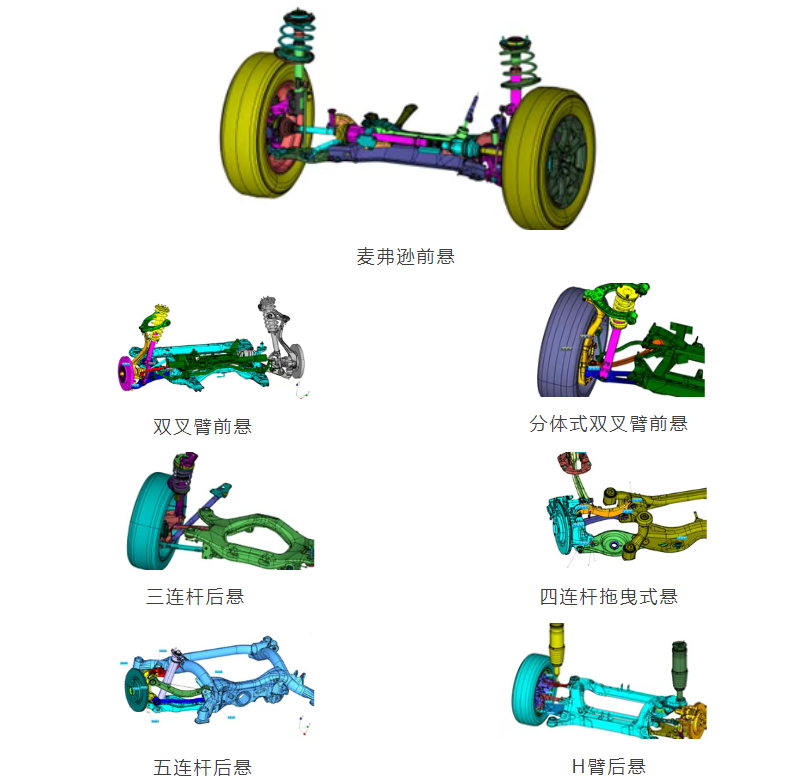
DTAS 3D两种建模思路可以解决以下悬架形式,麦弗逊、双叉臂、三连杆、四连杆、五连杆、H臂等。麦弗逊前悬是经典的前悬形式,由于麦弗逊前悬的一些弊端,在麦弗逊的基础上逐步衍生出了双叉臂前悬等。将麦弗逊前悬的结构应用在后悬上为三连杆后悬,俗称筷子悬架,其结构布置简单,成本低廉。随着对操控的要求越来越高,在三连杆的悬架形式上逐步发展出了四连杆(拖曳式刀臂悬架)、五连杆、H臂等悬架。本文主要讨论双叉臂前悬与五连杆后悬的建模方法。
如图所示:
二、双叉臂前悬与五连杆后悬的公差分析
建模思路:
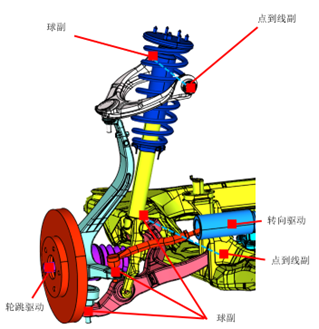
双叉臂前悬主要建立如下的运动副,包括2个驱动副,一个是轮跳的,另一个是转向驱动。
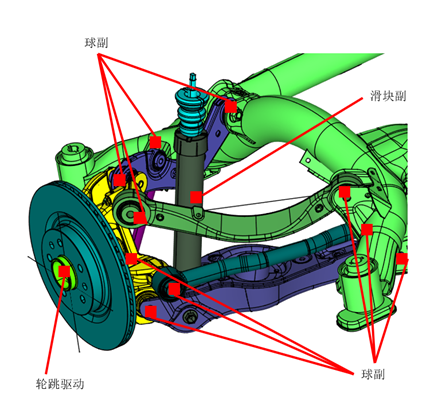
五连杆后悬悬架由于有5个连杆,所以与车架转向节共有10个球副,减震器等可以建立滑块副、球副等。轮跳驱动建立在转向节上。
五连杆后悬除了运动副建模以外,也可以采用多约束装配的建模方法,如下图所示。使用多约束装配控制转向节安装点与副车架安装点之间的距离,最终控制转向节的最终姿态。多约束装配不仅适用于五连杆后悬,也适用于其它各类型的前后悬架。多约束装配相比运动副建模求解速度快,建模简单等优点。

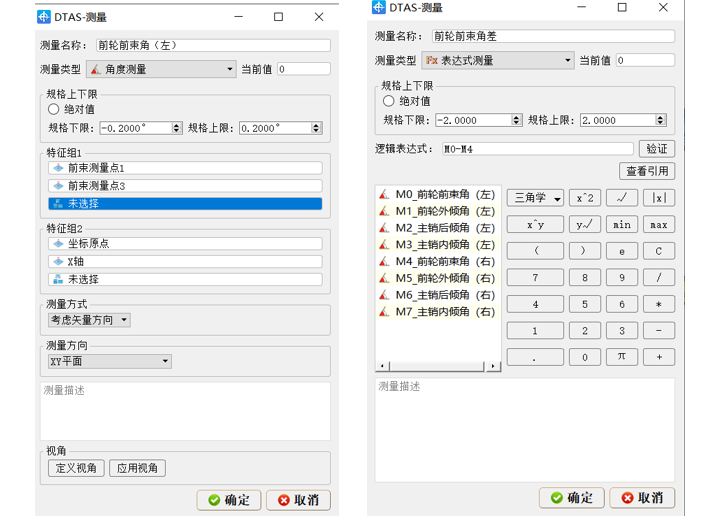
虚拟测量:
在DTAS 3D中可以建立各种虚拟测量,包括前束角、外倾角、前轮主销内倾、后倾角以及前轮左右前束角之差或之和等。
仿真结果:
运动轨迹分析,车轮在不同状态下,如转向角度、轮跳高度下的各状态轨迹分析。
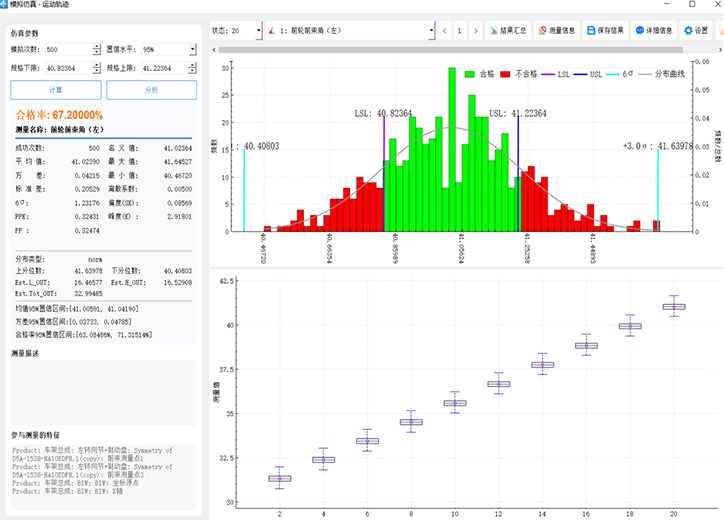
各个四轮参数的波动情况:
贡献度、传递系数分析等,各个公差对四轮参数的灵敏度及贡献度,为后续的优化指明方向。

仿真动画:
双叉臂悬架仿真动画
DTAS 3D多约束装配助力悬架公差分析及尺寸链计算:五连杆悬架仿真动画
其它悬架的公差仿真动画:
麦弗逊前悬仿真动画
双叉臂前悬仿真动画
三连杆后悬仿真动画
H臂悬架仿真动画
三、结论与展望
DTAS 3D满足了汽车各类悬架的公差仿真分析的需求,并提供静态与运动副多种建模方法,为汽车操控舒适性分析保驾护航。机构的各类为柔性衬套,如何将机构运动、公差仿真、柔性仿真三者耦合是当前与未来悬架公差分析的一大挑战。







评论前必须登录!
注册