 网硕互联帮助中心
网硕互联帮助中心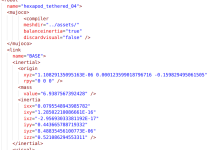
Mujoco足式机器人强化学习训练02(URDF转XML)
URDF文件转XML文件 在安装完成mujoco playground以后,设计到三维模型的导入,在sw转出的文件大多为URDF格...
URDF文件转XML文件 在安装完成mujoco playground以后,设计到三维模型的导入,在sw转出的文件大多为URDF格...

LL_XTCAT Bot -一个简洁的 QQ 机器人框架 基于 LLOneBot OneBot11 协议,Python 开发,开箱...
7.3 驱动器开发与控制接口 驱动器是人形机器人关节的“大脑和神经”,承担电机驱动、传感器反馈处理及实时通信的关键任务。在本节将从电机驱动电路...

7.2 执行器封装与一体化设计人形机器人关节执行器不仅是扭矩/转速的动力来源,也是整体结构、控制和散热的核心单元。在本节将重点探讨执行器的一体化...
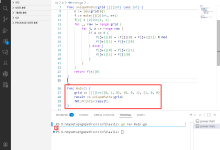
2026-01-29:统计镜子反射路径数目。用go语言,给定一个大小为 m × n 的二值网格 grid(0 表示空格...

首先说一下为什么要写这一篇博客,就是为了提醒大家要明确区分标准DH和改进DH。很多机器人初学者只知道用DH法建立串联机器人连杆坐标系,...
在智慧农业快速发展的背景下,传统农业采摘环节面临劳动力短缺、作业效率低、采摘质量不稳定等现实挑战。Deepoc具身模型开发板通过创新的技术架构和产...
一、NSE基础与在软件测试中的核心价值 Nmap脚本引擎(NSE)是Nmap工具的核心扩展模块,通过Lua脚本实现...
国内工业机器人品牌已形成第一梯队领跑、细分领域突破的格局,2025 年国产化率达55.3%,本土品牌份额首次超过外资。一、第一梯队&...
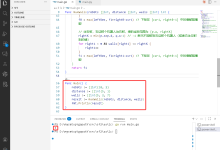
2026-01-26:可以被机器人摧毁的最大墙壁数目。用go语言,在一条无限延伸的直线上,分布着若干机器人和若干堵墙。...
