 网硕互联帮助中心
网硕互联帮助中心RPA机器人在客服行业的应用场景解析,助力企业降本增效
在数字化转型加速的当下,RPA机器人已成为客服行业突破效率瓶颈、优化服务体验的核心工具。它能够按照企业预设的业务规则,自动完成一系列...
在数字化转型加速的当下,RPA机器人已成为客服行业突破效率瓶颈、优化服务体验的核心工具。它能够按照企业预设的业务规则,自动完成一系列...
删除 ROS 工作空间后,重新创建同名工作空间的正确操作,确保新工作空间不受旧文件残留影响,核心是彻底清理残留 规范...

一、传统竞品报价分析的核心痛点 在ToB销售场景中,竞品报价的分析速度直接决定了谈判窗口的把握与商机转化率。传统模式下,销售人员需...
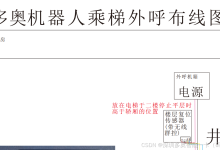
我来为您详细举例说明机器人、AGV/AMR、机器狗使用多奥梯控系统的完整乘梯流程,用一个具体的场景让您更清楚:🏢 场...
点击 “AladdinEdu,你的AI学习实践工作坊”,注册即送-H卡级别算力,沉浸式云原生集成开发环境,...
全球排名(按论文出现频率和影响力)排名品牌/型号产地轴数地位1Franka Panda / FR3德国7 轴无可争议的第一ÿ...

在科技飞速发展的当下,物流配送和环卫清洁行业正经历着一场前所未有的变革。天数智算凭借领先的技术实力,推出物流与环卫无人机器人解决方案...
《ROS2 构建系统 :colcon 与CMakeLists.txt 是如何协作的》 文章目录 《ROS2 构建系统 :colcon...
多传感器融合十年演进(2015–2025) 一句话总论: 2015年多传感器融合还是“卡尔曼滤波手工权重低频松耦合”的...

一、销售场景的核心痛点:被无效社交吞噬的人力成本 作为AI落地领域的架构师,我见证过太多B2B/B2C销售团队的困境:...
