 网硕互联帮助中心
网硕互联帮助中心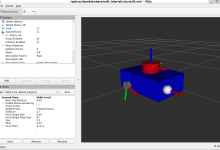
Linux:物理仿真与 Gazebo 世界
今天的主题是:给机器人赋予“物理肉体”。在 Rviz 里,你的机器人只是个“全息投影”,好看但不能打。为了让它能进 G...
今天的主题是:给机器人赋予“物理肉体”。在 Rviz 里,你的机器人只是个“全息投影”,好看但不能打。为了让它能进 G...
文章浏览阅读416次,点赞8次,收藏16次。本文介绍了ROS2服务的基本概念和RCLCPP实现方法。服务模型包含客户端和服务端,采用请求-响应模式,同一服务只能...
文章浏览阅读708次,点赞14次,收藏13次。在MATLAB命令行执行ros2node 和 ros2subscriber后,执行ros2 topic list,...
文章浏览阅读754次,点赞6次,收藏13次。一个动作定义由三部分消息定义组成,由动作客户端发送给动作服务器,用于发起新目标。当目标完成时,由动作服务器发送给动作...
