 网硕互联帮助中心
网硕互联帮助中心深入解析pykdl_utils:提升机器人运动学计算的Python效率
深入解析pykdl_utils:提升机器人运动学计算的Python效率 在机器人开发领域,运动学和动力学计算是核心挑战之一。传统C++实现的KDL库虽然功能强...
深入解析pykdl_utils:提升机器人运动学计算的Python效率 在机器人开发领域,运动学和动力学计算是核心挑战之一。传统C++实现的KDL库虽然功能强...
因为Ubuntu20.04安装ROS时默认会安装Opencv4.x版本和vins-fusion要求的3.x版本有冲突,需要修改一下文件...

文章浏览阅读49次。图像分割是计算机视觉的核心技术,旨在将图像划分为语义或特征相关的区域。主要方法包括基于阈值、区域、边缘、纹理的传统算法,以及基于深度学习的现...
文章浏览阅读105次。Livox ROS Driver 2 是用于Livox激光雷达产品的第二代ROS驱动程序,支持ROS1/ROS2。文档详细介绍了安装要求(...
文章浏览阅读293次,点赞11次,收藏8次。在ROS的catkin工作空间中,当多个包存在依赖关系时,常见首次编译失败问题。主要原因是依赖声明不完整(packa...

文章浏览阅读747次,点赞4次,收藏3次。摘要:ParameterServer是ROS系统中的关键组件,提供全局配置管理功能。它以键值对形式存储参数,支持动态修...
文章浏览阅读416次,点赞8次,收藏16次。本文介绍了ROS2服务的基本概念和RCLCPP实现方法。服务模型包含客户端和服务端,采用请求-响应模式,同一服务只能...
文章浏览阅读850次,点赞19次,收藏12次。摘要:本文介绍了ROS参数服务器的概念、作用与操作实现,操作包括在C++和Python中实现参数的增删改查_ros...
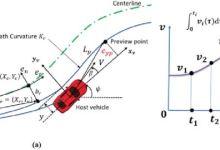
文章浏览阅读4.1k次,点赞88次,收藏77次。分段加加速度优化(Piecewise Jerk Speed Optimizer, PJSO)算法是常用的纵向速度...
文章浏览阅读867次,点赞23次,收藏12次。ROS 参数服务器是一个方便的工具,用于存储和管理 ROS 系统中的全局配置参数。它支持动态获取和设置参数,并在不...
