 网硕互联帮助中心
网硕互联帮助中心
基于MATLAB编程实现无人机编队仿真
文章浏览阅读379次,点赞3次,收藏11次。无人机编队仿真功能:九架无人机从不同初始位置集结为正方形编队,之后变换为三角形编队,并进行编队转弯、直线飞行以及爬升...
文章浏览阅读379次,点赞3次,收藏11次。无人机编队仿真功能:九架无人机从不同初始位置集结为正方形编队,之后变换为三角形编队,并进行编队转弯、直线飞行以及爬升...
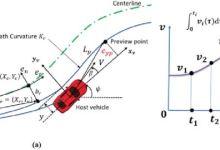
文章浏览阅读4.1k次,点赞88次,收藏77次。分段加加速度优化(Piecewise Jerk Speed Optimizer, PJSO)算法是常用的纵向速度...
文章浏览阅读121次。Sparrow是一个开源的移动机器人路径规划模拟器,重视模拟速度和轻量化,使用DDQN强化学习方法进行训练。本文在其基础上,增加了绘制训练...
