 网硕互联帮助中心
网硕互联帮助中心ADAS行车功能之LSS车道辅助系统功能\\LCC车道居中控制功能
一、功能原理及定义
LSS车道辅助系统,通常包含三个子功能:
- LDW(Lane Departure Warning):车道偏离警告,仅警告(声音/震动/显示),不控制方向盘
- LDP(Lane Departure Prevention):车道偏离抑制,纠正型控制,车辆偏离时施加反向力矩回到车道内
- ELK(Lane Departure Warning):紧急车道保持,紧急干预,针对相邻车道来车或道路边缘,防止碰撞
LCC车道居中控制功能:主动居中,持续控制车辆保持在车道中心线,无论是否偏离。
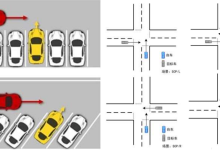
1. 车道偏离预警
- 通过前视摄像头检测车道线,当车辆未打转向灯且即将偏离车道(车道偏移量达到标定阈值)时,通过仪表文字 / 蜂鸣报警 / 方向盘震动提醒驾驶员接管,无任何转向 / 制动执行干预,仅为视觉 / 听觉 / 触觉预警。
2. 车道偏离抑制
- 当车辆轻微偏离车道时,EPS 电动助力转向系统输出小幅补偿扭矩,将车辆 “拉回” 原车道,纠偏后立即释放转向控制,无持续转向能力,扭矩值极小(通常≤5N・m),驾驶员可轻松接管。
3. 紧急车道保持
- 当车辆偏离(RodeEdge\\实线)车道或检测到邻车道有车辆 / 障碍(侧方角雷达辅助)时,EPS 输出较大纠偏扭矩(通常≤15N・m),同时 ESC 可配合单侧制动,快速将车辆拉回原车道,避免车道偏离碰撞,属于紧急工况下的被动干预。
4. 车道居中控制
- 通过前视摄像头 + 车身传感器检测车道线和车辆位置,由 EPS 全程主动输出转向角指令,将车辆稳定保持在车道中央位置,而非仅在偏离时纠偏。
总结:LSS 是「被动式车道守护」,仅在车辆即将 / 已经偏离车道时通过预警 / 小幅纠偏干预,全程由驾驶员主导转向;LCC 是「主动式车道居中」,全程主动控制转向系统,将车辆稳定保持在车道中央,属于横纵向协同的基础功能(可叠加 ACC 实现 L2 级辅助)。
二、状态机迁移
1. 功能状态
- OFF:功能禁用,功能关闭
- Standby:功能开启,处于使能状态,若出现驾驶员无意识下的车道偏离危险时,可立即进入“Active”状态



评论前必须登录!
注册