 网硕互联帮助中心
网硕互联帮助中心
微信自动消息发送工具(含源码)
程序采用opencv+pugui视觉方案,增加异常处理和重试次数,完全模拟人工操作,不存在封号问题,并同时支持微信和移动办公软件,程序采用模块化设计,只需要更...
程序采用opencv+pugui视觉方案,增加异常处理和重试次数,完全模拟人工操作,不存在封号问题,并同时支持微信和移动办公软件,程序采用模块化设计,只需要更...
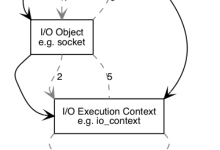
前言 boost.asio boost.asio 是一个跨平台的 C 网络库。支持同步 IO 和异步IO。 同步 IO boost::asio::io_con...
1.工具安装编程环境:Dev-C 下载网址:https://pc.qq.com/detail/16/detail_163136.ht...
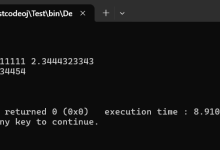
问题描述 给你两个正的实数A和B,你的任务是计算出AB的值。输入说明 本题目包含T组测试数据。 每一组测试数据在一行里面包含两个长度不大于400的...
1.1 循环的练习 题目名称:金币 deepseek解题思路: #include using namespace std; in...
认识端口号端口号是用于在网络传输过程中标识进程的一个数值。端口号(port)是传输层协议的内容. 端口号是一个2字节16位的整数; 端口号用来标识一个进程, 告...
前言:AI已经与我们的工作生活密不可分了,我们每天都与AI打交道。你知道如何与AI聊天吗?95%的人都做错了。 目录 ...
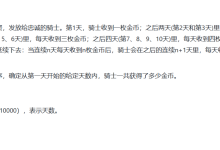
题目 on Luogu:[ABC438E] Heavy Buckets 前置芝士:倍增。 如果你直接去看这道题目,...
描述 尼科彻斯定理,又称为斐波那契数列定理,指的是对于任意正整数 n,存在一个由连续奇数组成的数列,使得该数列的和等于 n的立方。 例如: ∙ ∙对于 n=1...
析构函数的基本概念 什么是析构函数 析构函数(destructor)是一种特殊的成员函数,与构造函数功能相反。当对象结...
